
基于SCOUT+超短基线定位系统的海上失事飞机黑匣子探测方法
2021-09-14 09:30:30路青青郭金运秦建
全球定位系统 2021年4期
路青青,郭金运,秦建
( 1.山推工程机械股份有限公司,山东济宁 272104;2.山东科技大学测绘学院,山东青岛 266590;3.天津水运工程勘察设计院有限公司,天津 300456 )
0 引言
2014年发生的马航MH370和亚航QZ8501两起空难给人们敲响了警钟,而飞机残骸及遇难人员的搜救定位是一项复杂而又急迫的事情,特别是作为空难“见证人”的失事飞机黑匣子的搜寻定位打捞,是空难事故搜寻搜救的一项重点内容,受到人们极大的关注[1].
在马航MH370飞机残骸及黑匣子水下搜寻过程中,国外救援队伍利用美国的水下自主航行器“蓝鳍金枪鱼-21”、水下声波探测仪、海底声纳等先进设备进行搜救工作[1].1986年美国“挑战者”号的找回任务及“泰坦尼克号”的搜索等任务促进了国外深海探测的发展[2-4].中国使用的黑匣子搜寻仪是手持便携式,不适合大面积深海搜寻作业,深海搜寻技术方法与西方国家有很大差距[3].在水下信号搜寻方面,吴国清[4]利用试验数据实现浅海水平距离500 m 内水下目标被动测距;中国科学院声学研究所田杰等[5]给出了一种基于二元结构的水下目标定位系统及定位方法;哈尔滨工程大学[6]提出了一种基于差分技术的水下定位方法;中国船舶重工集团公司某研究所承担的2013年科技部科技支撑计划项目子课题系统研制及示范.该课题主要是针对浅海条件下水上作业人员的应急搜寻和定位,为深水海域水下声信标搜寻探测奠定了技术基础.2007年,为保障国家某海上重大专项试验,该研究所研制了某型声信标探测定位系统及3种频率的声信标,该系统至今一直在该试验中执行关键设备的水下搜寻定位任务.在水下目标自主搜寻与定位方面,中国船舶重工集团公司某研究所,很早就进行了无人水下航行器(UUV)装备和技术的研究.在20世纪70年代末开始进行水下机器人的研究,为兼顾阵元数、相位模糊和基阵孔径大小.李想等[7]、喻敏等[8]提出了8 元阵的概念,充分利用了两两半波长布阵解决相位模糊问题,再利用四组换能器间的大孔径来解决定位精度的问题;郑翠娥等[9]进一步改进基阵结构,添加了一对用于相位抗模糊基元,使结构更加简单,降低了系统复杂度;肖亮等[10]将传统超短基线扩展到9元阵、单边5元基阵的方案,较好地解决了定位精度与远距离的问题.为了使超短基线的作用距离增加,同时考虑相位模糊与基阵孔径的问题,刘增力等[11]采用了24 元线阵来定向黑匣子信标.
本文结合参与亚航QZ8501黑匣子搜寻工作经验,针对我国海上遇险目标搜寻定位应急需求,以解决高效快速确定飞机残骸坠落区域、黑匣子精确搜寻定位为目标,形成一套完整有效的海上飞机黑匣子搜寻定位技术方法.提出一套系统的黑匣子应急定位打捞体系,验证利用超短基线声呐定位系统精确定位黑匣子位置的可行性和可靠性.
1 超短基线黑匣子搜寻定位原理方法
1.1 超短基线黑匣子定位原理
超短基线定位系统(USBL)的定位原理为:通过测量信号的到达方位和距离来定位,而测向任务是通过测量信号到达接收基阵阵元之间的相位差来实现的,这是超短基线定位系统的关键[12].在超短基线换能器中有5个成圆形均匀分布的水听器和在圆心中的声学发射器,通过发射器发射声波,5个水听器接收信标信号进行距离交汇来定位信标位置.
如图1所示,以船艏向为X轴正方向,以船右舷为Y轴正方向,符合右手坐标系.在某一时刻,由超短基线收到的信标信号计算得出的斜距S与Xa、Ya和黑匣子所处水深Z之间的关系为
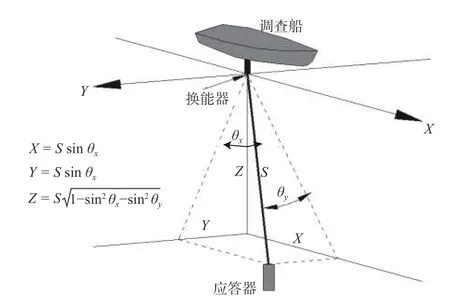
图1 超短基线定位原理

Z为超短基线信标位置水深,在超短基线定位中,其值需根据现场情况进行人为输入.
从而解得信标在Y轴上的分量为

1.2 黑匣子快速定位
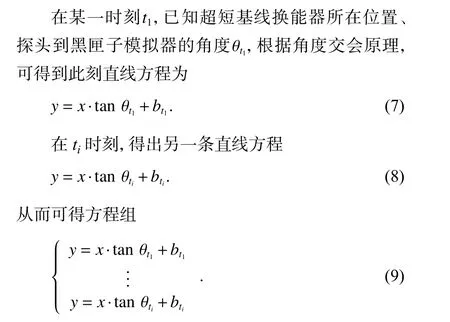
解算式(9)便可得出最后黑匣子所在位置.
2 SCOUT+超短基线黑匣子海上搜寻方法
由英国Sonarydne 公司生产的SCOUT+UABL,可兼容四种信标Wideband Sub Mini、OBC、AODC、水深测位仪(pinger).其中pinger模式可进行黑匣子搜寻作业.为了尽可能真实地进行黑匣子海上搜寻,本次海试选取天津港临港工业区博迈科港池,水深较平坦约为10 m,航道处水深约15~20 m,测试位置图如图2所示,海试流程如图3所示.

图2 博迈科港池测试位置图
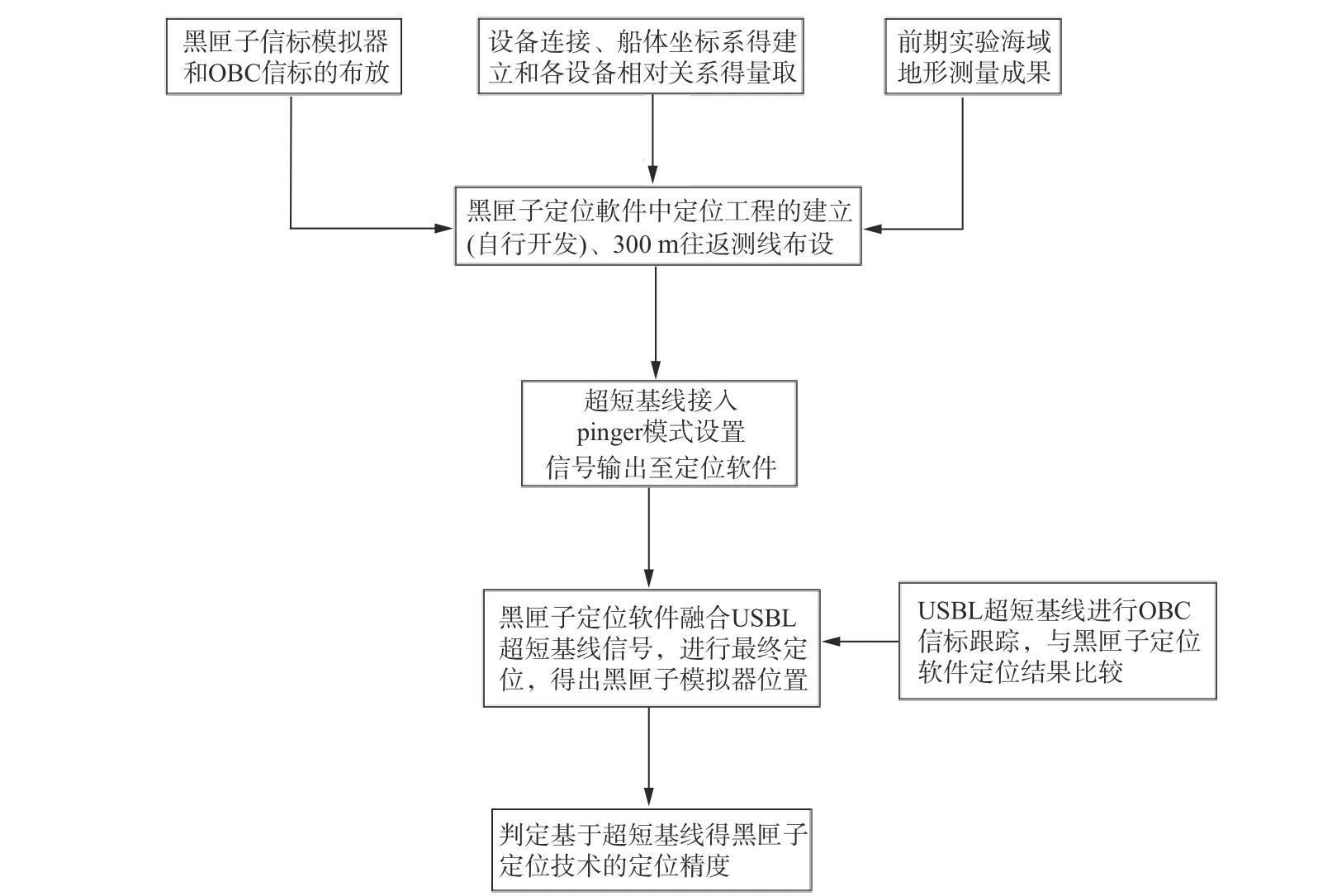
图3 海试流程图
3 试验及结果分析
3.1 试验过程
设备连接好后,在SCOUT+USBL 中添加pinger模式信标和OBC信标.特别注意的是,在添加pinger模式信标时,需要输入跟踪海域水深,由式(1)可以看出,水深h值也是影响平面位置的一个因素.把OBC信标和黑匣子模拟器并排同时固定在重物上并抛入海底,信标和模拟器几何中心距离为10 cm,可认为两者位置相同,忽略两者安装距离误差.精确跟踪OBC信标30 min 后,取OBC信标平面坐标的平均值,作为黑匣子模拟器的真实位置坐标.以此为中心布设长为300 m 的测线由远及近进行pinger 模式跟踪,设置水深为20 m,记录数据.本文对黑匣子定位精度评定分为两种方法:第一种是采用Scout+自带软件USBL 采集黑匣子模拟器结果与OBC信标所测位置进行比较分析;第二种是采用我院开发的定位软件通过角度定位结果,对比Scout+安装位置与OBC信标所测位置实时真实角度进行分析.在采集数据过程中,分别更改USBL 中信标参数个更新率(update rate),从1~6 s分别测试探测黑匣子模拟器信号质量,发现在其他环境不变的情况下,使用4 s的update rate采集的数据质量相对较好.更改receive pulse length 对本次试验信号质量无本质上的影响.所以最后采集数据时,设置receive pulse length 为1 ms,updaterate为4 s.
3.2 平面定位结果分析
文中使用实际海况下采集的4条300 m 测线上的数据进行汇总计算,与OBC信标采集的最终位置对比,进行其位置精度评定.实际数据采集时,超短基线换能器距离黑匣子最近距离约为27 m,其中两条为往返测线,对比结果如表1.

表1 pinger 模式模拟器位置与OBC信标最终位置对比m
通过超短基线进行pinger 模式对黑匣子模拟器进行跟踪定位.由表1和图4可知,与实际位置对比,随着距离的增加,数据质量下降,约为20~70 m,数据波动较小,数据质量比较稳定.但是在20 m 水深情况下,最大位置差达到20 m,最小位置差也在2 m 以上,位置差的平均值为8.41 m,对比结果的均方根(RMS)值为10.50 m.以此可以看出:通过超短基线pinger 模式,借助人工设置水深情况下,对黑匣子模拟器平面位置的跟踪定位精度不高,超过80 m 距离以后,数据质量已经不可靠.分析原因可能是由于水深太浅,远距离情况下超短基线换能器接收信号角度受到限制.引起位置误差较大原因,可能与在设置pinger 模式时输入的水深数值有关,从式(5)、式(6)可以看出,探测黑匣子在平面位置坐标与水深h值有很大关系,而实际海试中,水深h值也只是输入的某一区域的大概水深.从对比结果可以看出:虽然通过超短基线进行黑匣子模拟器搜寻的平面定位精度不高,但其测量精度满足对黑匣子初步探测搜寻需求.
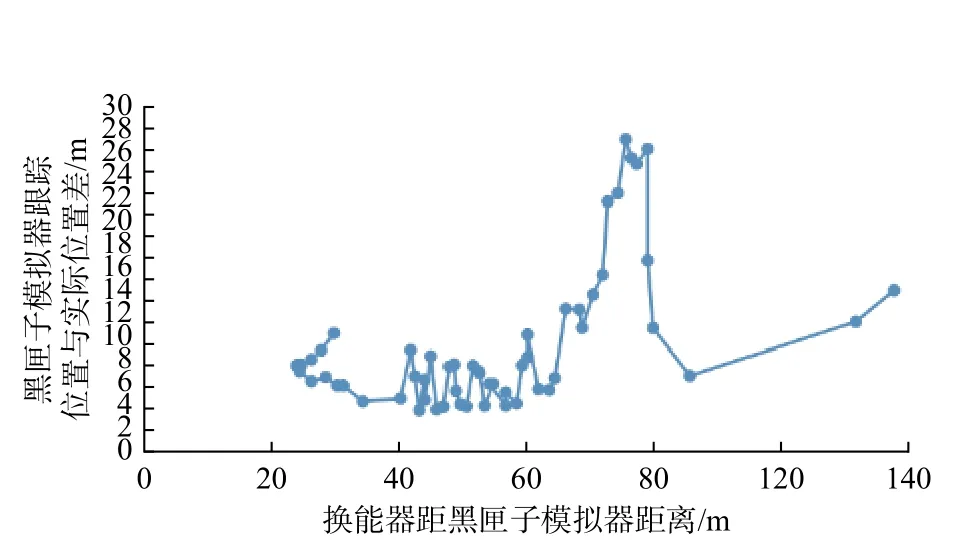
图4 pinger 模式跟踪位置与实际位置比较图
3.3 角度测量精度分析
文中采用4条测线中超短基线跟踪pinger 模式下黑匣子模拟器所得到的角度值,与同一时刻黑匣子模拟器实际位置位于超短基线换能器时的实际角度进行对比,结果如表2所示.

表2 角度定位中测量角度与实际角度对比表(°)
由表2和图5可知,通过超短基线pinger 模式进行黑匣子探测定位,角度测量与实际位置角度差值,最大为4.9°,最小为0.2°,角度测量差的RMS 值为2.64°,其数标准差为0.88°,由RMS可以看出,角度测量的精度在3°以内.
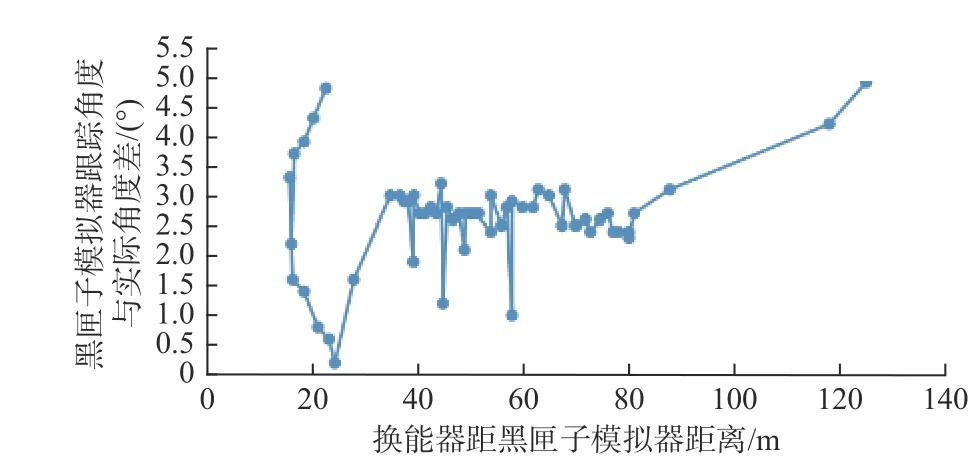
图5 角度定位中测量角度与实际角度对比成果图
实际差值统计中,有80%的差值接近3°,分析可能是因为换能器艏向安装误差引起,由于使用的渔船船舷弧度过大,导致超短基线换能器安装杆不能固定牢固,在行驶过程中由于水流原因导致换能器方向改变.考虑到此因素,在原角度差值中剔除3°的仪器安装误差.进行数据分析如表3所示.

表3 角度定位中剔除3°安装误差后测量角度与实际角度对比表(°)
由表3可知,在剔除3°的仪器安装误差后,角度差值的最大值为0.9°,最小值已经达到0°,RMS值为0.40°,角度测量的定位精度已经在1°以内.测量结果可以达到快速搜寻黑匣子的定位精度要求.
4 结束语
超短基线pinger 模式信标搜寻功能为黑匣子海上搜寻提供了技术支持.天津水运工程勘察设计院有限公司海洋勘察处承担的亚航QZ8501遇难飞机残骸搜寻和黑匣子搜寻的实际经验为超短基线黑匣子搜寻技术提供了宝贵经验.
本文利用Sonardye公司生产的SCOUT+USBL,在真实海上环境进行黑匣子模拟器的搜寻定位试验,并对取得的数据进行分析,得出其定位精度在10 m量级,可以进行黑匣子模拟器的初步搜寻定位需求.通过SCOUT+USBL 的pinger 模式进行黑匣子搜寻定位提供的角度数据,使用快速角度定位软件,进行超短基线定位数据融合,使得其角度RMS定位精度达到0.40°.
由本文的结果看,通过pinger 模式进行黑匣子搜寻定位精度达到1°以内,结果可靠.
猜你喜欢
世界博览(2022年7期)2022-04-08 12:57:00
环球时报(2022-03-28)2022-03-28 15:14:59
铁道通信信号(2018年3期)2018-04-19 02:32:56
声学与电子工程(2017年1期)2017-06-22 11:30:06
声学与电子工程(2017年1期)2017-06-22 11:29:57
南风窗(2016年10期)2016-05-26 19:27:02
雷达与对抗(2015年3期)2015-12-09 02:39:00
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
百科探秘·航空航天(2015年2期)2015-11-07 07:04:25
电源技术(2015年2期)2015-08-22 11:28:12
