
长大隧道盾构机过站平面测量方案设计
2021-09-13 01:37陈瑶
天津建设科技 2021年4期
陈 瑶
(中铁第六勘察设计院集团有限公司,天津 300308)
由于地铁线路建设周期、经济成本等因素,盾构机过站技术得到越来越广泛应用,常规测量方法[1~2]在过站过程中,受车站结构、操作空间、总长度等影响,较一般区间积累更多的贯通误差。贯通误差的三个分量中,纵向、竖向贯通误差相对容易控制,但横向贯通误差受地上、地下、始发、掘进、接收等各工序环节影响,积累更多,是施工测量中的重点和难点[3]。
本文结合南京地铁项目,根据现场实际情况及工作要求,对掘进长度3 km的长大隧道进行方案设计及贯通精度分析估算。
1 工程概况
在建南京地铁9号线在南京站站与已运营地铁1号线和3号线进行换乘。由于南京站站(地下4层车站)为已建成车站,与3号线同层平行,根据施工计划,盾构机从曹后村始发,经南京站站负四层过站继续向前推进,从中央门站接收。曹后村站—中央门站区间全长约3 km,其中曹后村站—南京站站区间长约1.3 km、南京站站—中央门站区间长1.4 km、南京站站长约364 m。见图1。

图1 曹后村站—中央门站区间施工组织计划
2 联系测量
2.1 曹后村站—南京站站区间
区间右线长1 287.520 m,左线长1 299.029 m,掘进过程中进行3次联系测量(不含始发定向测量),分别在隧道掘进至100~150 m、1/2处、贯通前100~150 m时各进行1次,联系测量方式采用双联系三角形方法,严格按照相关技术要求执行[4]。
2.2 南京站站—中央门站区间
南京站站应加密控制点,布设于底板,左右线各布设2点。根据施工计划,于曹后村站—南京站站区间双线贯通后、南京站站—中央门站区间右线盾构二次始发前,进行南京站站底板加密控制点第1次测量;在南京站站—中央门站区间左线盾构二次始发前,进行南京站站底板加密控制点第2次测量(测量路线与第1次测量相同)。
2.2.1 右线
右线长1 262.912 m,过站后进行二次始发;于底板加密控制点第1次测量后,以南京站站右线底板加密控制边NJZY-01—NJZY-02作为始发定向边,即该区间右线二次始发定向测量与南京站站右线底板加密控制点第1次测量同步进行,见图2。
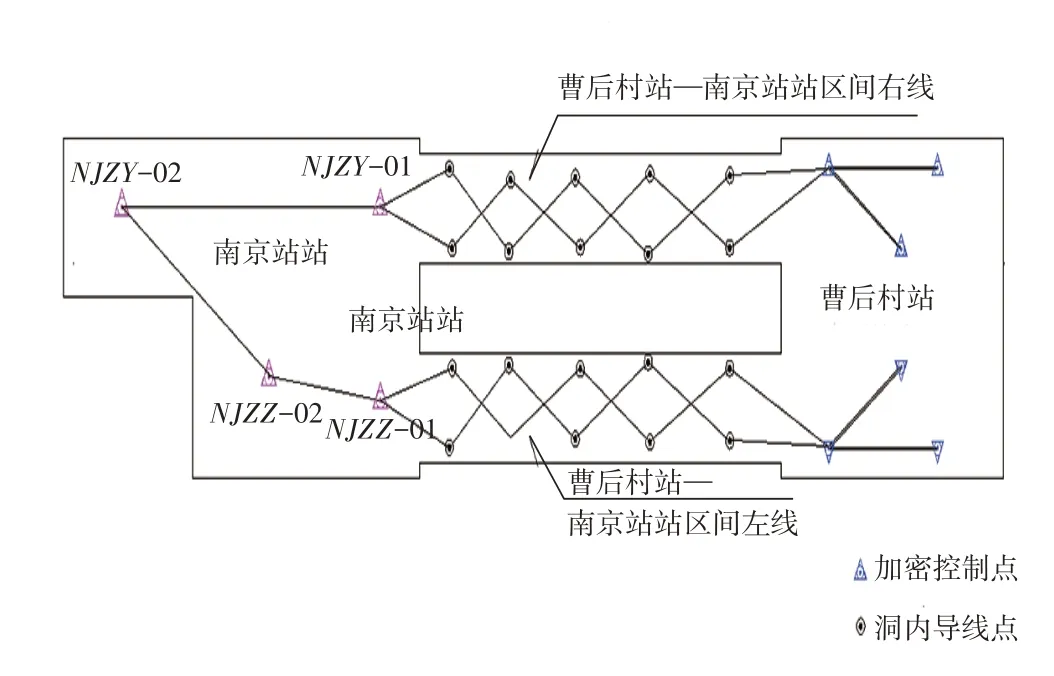
图2 二次始发测量及底板加密第一次测量
右线掘进过程中分别在隧道掘进至100~150 m、1/2处、贯通前100~150 m时各进行1次联系测量;联系测量均于曹后村站进行。单次测量完成后将测量成果与上期测量使用成果进行比较,以比较后取值作为控制测量的起算值。
2.2.2 左线
左线长1 438.338 m,过站后进行二次始发;于底板加密控制点第2次测量后,以南京站站左线线底板加密控制边NJZZ-01—NJZZ-02作为始发定向边,即该区间右线二次始发定向测量与南京站站右线底板加密控制点第2次测量同步进行。
南京站站—中央门站区间左线掘进过程中分别在隧道掘进至100~150m、1/2处、贯通前100~150m时各进行1次联系测量;联系测量均于曹后村站进行,按照南京站站底板加密控制点第2次测量网形对控制边NJZZ-01—NJZZ-02进行测量,单次测量完成后将测量成果与上期测量使用成果进行比较,以比较后取值作为控制测量的起算值。
2.3 陀螺定向测量
曹后村站—中央门站单线区间隧道长度>1 500 m,为保证隧道贯通精度,增加陀螺仪定向测量,以校核地下控制边方位。
1)站底板加密控制点第1次测量时,对控制边NJZY-01—NJZY-02、NJZZ-01—NJZZ-02进行陀螺仪定向测量,以校核其方位。
2)底板加密控制点第2次测量时,再次对控制边NJZY-01—NJZY-02、NJZZ-01—NJZZ-02进行陀螺仪定向测量。
3)南京站站—中央门站区间左右线掘进到1/2处,即盾构机从曹后村始发掘进到2.3 km时,采用陀螺仪加测区间隧道内末端导线边方位。
3 横向贯通误差精度估算
横向贯通误差为沿垂直于坑道施工中线的水平方向贯通偏差,是贯通误差在垂直于坑道施工中线的水平方向上的投影。本工程认为产生横向贯通误差的5个工序都是相互独立的,总的横向贯通中误差

式中:M为横向贯通中误差;M1为地上平面控制测量引起的横向贯通中误差;M2为始发井平面联系测量引起的横向贯通中误差;M3为地下平面控制测量引起的横向贯通中误差;M4为盾构机姿态定位测量引起的横向贯通中误差;M5为接收井平面联系测量引起的横向贯通中误差。
3.1 M1计算
地面首级平面控制点大多沿线路两侧对称布设,从已知控制点测设到近井点大多仅需测设1~2站,故此项误差按支导线形式进行估算

式中:mβ为导线的测角中误差;L为支导线长度;n为导线测站数;ρ为常数,即1弧度对应的秒值。
一般接收井采用与始发井相同的地上平面控制网测量方法且相互独立完成测量,则实际地上平面控制测量引起的横向贯通中误差应为

已知地面首级平面控制点距离始发和到达井口均约300 m,向近井点传递仅需测设2站。本项目测量采用的仪器为徕卡TS60全站仪,测角精度0.5″,外业测设4测回,考虑到环境等因素影响,测角中误差控制在2″是可行的。
3.2 M2计算
联系测量将采用一井定向,定向误差引起横向贯通误差

式中:m为一次定向中误差;L为隧道长度。
因隧道贯通前会在始发井对同一定向边独立进行n次联系测量,则联系测量引起的横向贯通中误差可表达为

根据南京轨道交通工程测量管理办法规定,两次独立定向所测得的地下定向边的方位角较差一般≯12″,则单次定向允许误差应为,一般允许误差为中误差的2倍,则单次定向的中误差应
3.3 M3计算
由于地铁隧道内观测条件相对较好,导线点布设近似等边直伸形且加测陀螺定向,故按等边直伸方向附合导线进行横向贯通中误差计算

式中:mβ为导线的测角中误差;L为隧道长度;n为导线测站数。
考虑线路走向及曲线半径等因素,洞内控制点间距约150 m左右,洞内导线点约20个,采用徕卡TS60全站仪,测角中误差仍按2″考虑,利用式(5)计算的地下平面控制测量引起的横向贯通中误差M3为±37.6 mm。
3.4 M4计算
规范[4]规定姿态定位测量中误差应<±3 mm,假设定位中误差全部传递给横向贯通中误差,即M4=±3(mm)。
3.5 M5计算
到达井采用与始发井相同的测量方法,定向边至贯通面的距离约20 m,则

3.6 M计算

总的横向贯通中误差结果为±45.6 mm,满足规范[4]贯通测量中误差不应超过±50 mm的要求。
4 结语
由于南京站站为已建成车站,既不具备联系测量条件,也无地下已知控制点,本方案通过联系测量、底板控制点联测、陀螺定向等手段,有效提高贯通精度。充分考虑现场条件、各工序对隧道贯通误差的影响后,估算的贯通精度仍满足规范要求,说明该测量方案合理可行。
猜你喜欢
中国新技术新产品(2022年15期)2022-11-08
铁道勘察(2021年6期)2021-12-27
全球定位系统(2021年1期)2021-03-26
幼儿教育·教育教学版(2020年8期)2020-12-23
幼儿教育·教育教学版(2020年8期)2020-12-23
山西交通科技(2020年4期)2020-09-30
筑路机械与施工机械化(2018年8期)2018-09-03
科技创新与应用(2018年20期)2018-07-28
北京航空航天大学学报(2017年4期)2017-11-23
运动(2016年7期)2016-12-01
