船海一体化海洋环境立体监测系统设计
2021-09-13 07:46张健庚贺保卫
中国新技术新产品 2021年12期
张健庚 贺保卫
(1.中船重工(青岛)海洋装备研究院有限责任公司,山东 青岛 266520;2.青岛杰瑞工控技术有限公司,山东 青岛 266061)
0 引言
目前,我国海洋生态环境呈现恶化趋势,随着经济的发展以及国家发展要求,合理利用海洋资源,减少海洋灾害造成的损失,为政府制定海洋环保政策和海洋发展计划提供依据,建立一个监测覆盖面积广、监测手段丰富的海洋环境立体监测系统是海洋环境监测技术发展的必然趋势。
海洋环境立体监测系统,是一套由空基-岸基-海基构成的连续、快速、有效的多平台、可长期定点监测海洋环境的立体监测系统。空基海洋环境监测平台以海洋无人机等组成;岸基海洋环境监测平台以固定的海洋环境监测站与地波雷达站组成;海基海洋环境监测平台以潜标、浮标、漂流浮标、水下观测站等构成[1]。
1 现状分析
了解到目前的海洋环境监测手段单一,多为单一纵度或者横截面监测,在广域的海区实现全方位立体化监测比较困难。主要问题包括4 个方面:1)各类监测设备相对独立,数据的获取来源较为分散,数据尚无统一的规范可遵循,融合情况不佳。2)监测系统集成性差,目前构建一个统一的系统对所有的观测设备进行统一管理较为困难。3)数据的存储,基本依靠定时或者人工上传的方式,数据的实时性相对比较差。4)数据的分析,主要依靠设备自身附带的软件和人工进行分析,功能单一。
为了克服现有技术的不足,解决监测不够立体化等问题,设计了船海一体化海洋环境立体监测系统,其优势为将不同的监测成果集成在一个区域性的海洋环境立体监测系统中,建立海洋环境要素数据库、提高数据采集效率、为相关领域提供各种形式的信息服务,系统朝智能化和一体化方向发展。
2 系统总体架构设计
一个完整的海洋环境立体监测系统从总体结构上由立体监测集成平台、数据中心、用户部分组成,如图1 所示。其中海洋环境监测集成平台由气象监测子系统、水文监测子系统、海水环境监测子系统、海底面监测子系统和大气环境监测子系统组成;数据中心包括数据传输系统和数据处理系统,利用通信网络将数据与信息连接成一个整体系统[2],并将系统间数据提供给各级用户。

图1 海洋环境立体监测系统组成
利用建于空基(卫星、飞机)、海基(浮标、船舶)、海底(潜标)的监测设备直接获取所在海域的监测数据与资料。数据传输系统利用无线或有线等方式将监测数据快速、有效地传输至数据处理系统。数据处理系统将原始监测数据进行预处理,建立数据库,进行信息产品制作及管理。
3 立体监测集成平台设计
3.1 气象监测子系统
船舶气象采集仪是气象监测子系统主要组成,是一种用于风速、风向、气温、相对湿度、海平面气压等海洋气象参数自动观测的智能仪器,具体参数监测范围见表1。

表1 气象参数监测范围
3.2 水文监测子系统
水文监测主要包括海水流速、流向和海水水质等。该系统采用海流测量仪,基于声学多普勒技术测量流速和流向,具有测量范围广、精度高、准确性强的特点,具体参数见表2。并且海流测量仪设计紧凑、坚固耐用、操作简单、无活动部件、抗生物附着性强,可采用船载固定支架进行布放。海水监测系统主要采用海水环境监测浮标等用于采集海水数据,包括甲烷、二氧化碳、海水压力、海水温度、海水盐度、海水浊度、多普勒声学海流、多普勒声学剖面海流等,对整个海洋环境进行立体监测。

表2 水文参数监测范围
获取数据信息后需进一步修正数据参数,才能够正确的反应测量点的海水环境数据。修正公式为参数真实值=参数读数*slope,其中
式中:ai表示第i个水化学分析样本由传感器测出的参数,bi表示第i个水化学分析样本由水化学分析实验获得的参数,slope表示修正后的斜率参数修正值。
3.3 海底面监测子系统
海底面监测子系统组成如图2 所示,主要使用坐底式观测平台用于采集海底数据,包括海水溶解甲烷、二氧化碳、温度、盐度、压力、溶解氧、pH 值、浊度、叶绿素、多普勒声学海流、多普勒声学剖面海流等,以用于风险现象预防。

图2 海底面监测子系统框图
坐底式观测平台一般工作于海深超过1000m 的海床处,一般通过船只进行布放坐底式观测平台,借助船只的通信电缆,将坐底式观测平台沉方入海底,并利用水声与ROV 进行定位,通过锚系将其固定在海床上。系统采集观测仪器测量数据后进行存储,并可通过水声通信传输测量数据。系统工作时间结束后,通过声学应答释放器遥控回收。
3.4 海床监测子系统
通过布置在观测点的多个海床面数据采集设备,对海水水深、底层水温、水压等主要影响因素进行分析。同时,利用海床面扫测机器人定时对海床面进行扫测,监测海床面的地形,及时发现海床的异常变化。通过模拟数据试验验证和扫测成像软件以用来评估海床面的稳定性。利用坐底式观测平台构成监测阵列,对海底微小形变进行监测;通过多参数水质分析仪中所集成的水下压力传感器测量海底压力,若水下应变发生变化,则压力传感器的数值也会随之发生变化。并且不定期的利用水下机器人在海底进行观测作业。
海床传感器采集到的海底形变数据同样需要进行进一步处理及数据加工,才能够正确地表述海床的下限程度,参数修正值为测量点周围3 点的算术平均值。
3.5 大气监测子系统
大气监测系统主要包括监测仪、浮标、GPS 单元等。
将集成气象传感器、二氧化碳传感器的平台监测仪安装在监测平台上,实时监测平台周边大气中二氧化碳含量以及气象数据。在监测平台周边设有浮标,每个浮标同样集成气象数据获取传感器和GPS 系统,实时测量周边大气二氧化碳含量,气象数据获取子单元采用六要素气象传感器,实时测量记录监测平台周围的气温、湿度、气压、风向、风速、雨量等关键性数据,并获取监测点对海表大气气象数据的影响;GPS 用于获取观测点的位置数据,主要包括坐标数据和时间数据,并对采集到的这些数据进行定性分析。
4 数据传输系统
根据现场监测系统的环境条件不同,系统针对不同的监测设备和平台采用不同的通信方式。由于气象水文监测与大气检测单元主要布置在海面以上,所以通信方式选择较为方便、快捷的电缆传输和卫星传输。检测单元的数据通信技术包括浮标连接卫星通信和平台监测仪直接通过电缆进行通信2 个部分。数据收发模块通过北斗网络实现现场和数据采集系统之间的无线数据传输,一方面负责把数据采集仪采集到的数据发送至采集系统;另一方面,接收从数据采集系统发来的指令,通过这个功能,可以实现仪器设备的远程操控。通信网络架构如图3 所示,数据传输采用目前最稳定的北斗/GPRS/CDMA/3G/4G,中控室操控人员可以直接接收数据、发送指令。平台监测仪则通过电缆与数据采集系统直接相连进行通信。坐底式观测平台采取水声通信方式。其主要优势为结构紧凑、简单实施,高速率数字通信,准双工数据传输,先进的多路径抑制,内置前向纠错和数据压缩,有保障的数据传输,最高可达8 个可调整优先顺序的数据流,不间断数据流的顶部传输实时讯息,UW 网络特性,低能量损耗,内置相对速度和测距,通信时可跟踪,可扩展USBL 模块,信号完整性和多路径结构诊断,带有先进命令集的透明串口,OEM 选项和系统集成服务。
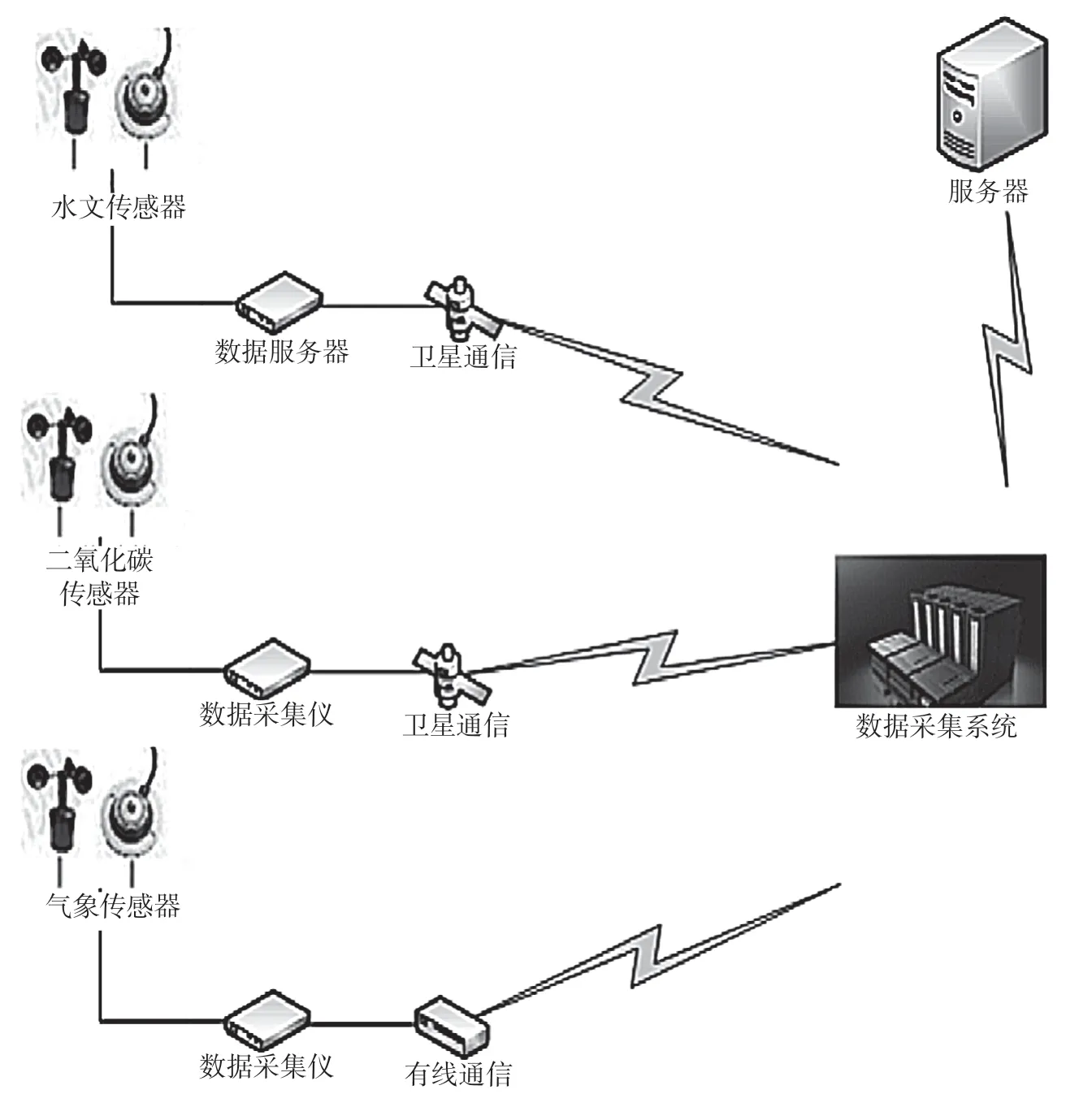
图3 通信网络架构
5 数据预处理系统
系统通过数据获取,建立数据库,开发数据库应用,对各类系统提供的数据进行分类、合并处理,从而提供可视化产品、数值分析产品等信息化服务功能,进而实现海洋环境立体监测资料的业务化管理和服务[3]。
系统采用4 层体系结构模型构建(如图4 所示),分别为应用门户层、可视化服务层、数据资源及处理层和基础设施,系统层次划分清晰、功能定位明确、各层间耦合性低,具有良好的可扩展性。

图4 数据预处理系统体系架构图
应用层:接收用户产生的交互信息,向用户显示可视化任务执行结果。应用层为用户定制,提供可视化任务以及操作交互操作,提供统一完整的用户界面。
服务层:响应可视化应用门户的任务请求,利用可视化资源完成具体的可视化任务,为可视化应用提供透明、高效、可靠的运行环境,保证可视化任务执行时用户的可靠性、实时性和稳定性需求。
数据处理层:提供服务层使用的各种可视化数据资源,包括海洋地理信息数据、海洋环境信息数据以及各种实体模型等,并对数据进行必要的整合、加工、处理和标准化。
基础层:提供系统运行的基础软硬件支撑框架。
6 海洋环境立体监测系统应用
6.1 实时监测和通信
海洋环境立体监测系统可以通过浮标与卫星进行通信,通过电缆与平台监测仪进行通信。系统应用在抢险救灾和水下目标入侵报警时都可以突出海洋环境立体监测系统实时监测和通信的优势。
6.2 远程操控
海洋环境立体监测系统之间通过无线数据传输,因此可以远程操控设备。当预警到恶劣天气或探测到涡流发生时,可以对仪器远程操控,发出报警信号,提醒过往船只。
6.3 精准播报
海洋环境立体监测系统具有测量范围广,精度高,准确性强的特点。应用在环境监测、资源勘查、科学实验等方面,高精度的监测结果都会确保科研工作的顺利进行。
6.4 GPS导航定位
拥有北斗定位系统的海洋环境立体监测系统能够实时监测过往船只的动向,定位船只的位置及动向,可以应用在近岸防卫侦测,预防敌船的侵犯;可以定位船只,对其进行海下暗礁指导,减少事故的发生;可以在大雾天气,对船只进行位置方向导航;还可以提供失联船只的循迹报告,为早日破案指明方向。
7 结语
海洋环境立体监测系统如今已被列为我国建设海洋强国的重要内容之一,它能准确有效地将海水质量、海洋环境综合变化清晰地展现出来,为国家海洋生态环境保护方面提供支持。如何加强系统设计技术研究是建立现代化立体监测系统的关键。海洋环境立体监测系统设计是一项复杂的设计过程,其中涉及数据的采集、传输、处理、可视化信息化服务等多方面技术问题。利用该设计方案的海洋立体观测平台,可以为海洋相关部门提供相关服务。但如何科学规范的加强系统顶层设计,更好地实现系统及业务化运行,还需要进一步研究。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
铁道通信信号(2020年3期)2020-09-21
小哥白尼(趣味科学)(2020年3期)2020-07-27
铁道通信信号(2018年8期)2018-11-10
中国海洋大学学报(自然科学版)(2018年11期)2018-10-15
军营文化天地(2018年2期)2018-04-20
中国海洋大学学报(自然科学版)(2017年7期)2017-06-05
创新作文(小学版)(2016年10期)2016-11-11
应用海洋学学报(2014年4期)2014-11-22
石油工程建设(2014年5期)2014-03-20