掘式装载机动力学分析
2021-09-10 07:22:44史伟
内燃机与配件 2021年10期
关键词:台阶
史伟
摘要:挖掘式装载机在不同的工作状态和路面条件下,各个主要部件的质心位置、受力等状态都会不同。挖掘式装载机的工作环境较为恶劣复杂,在该环境下一般会出现台阶、沟壑等路面情况。所以根据挖掘式装载机仿真的技术要求,结合在实际工作中存在的工况,对几种工况进行仿真分析。具体内容包括挖掘式装载机的台阶、沟壑以及摆臂等动力学仿真。
关键词:台阶;沟道;动力学仿真
中图分类号:TB771 文献标识码:A 文章编号:1674-957X(2021)10-0034-02
1 仿真的技术要求
运动学分析:利用仿真软件,从运动学的角度,在固定履带式装载机越障机理的基础上,分析该采装机对台阶、沟道等典型障碍的越障运动机理,分析最佳越障性能及对应的质心和摆臂的位置。
动力学分析:利用动力学仿真软件,建立动力学模型,设置采装机各关节的运动关系,然后在相应部位添加驱动力,以保证模型的可靠运动;对典型障碍如台阶、沟道等进行越障运动仿真。
稳定性分析:利用动力学仿真软件对采装机的越障机理与越障能力进行分析,对采装机的越障运动进行仿真,对摆臂系统收起时的采装机进行稳定性判定,然后对摆臂系统工作时的采装机进行稳定性分析。得出静态稳定性条件和摆臂系统对采装机姿态的影响,分析其运行的稳定性和最佳越障性能。
2 不同工况的仿真与分析
2.1 越沟壑实验与分析
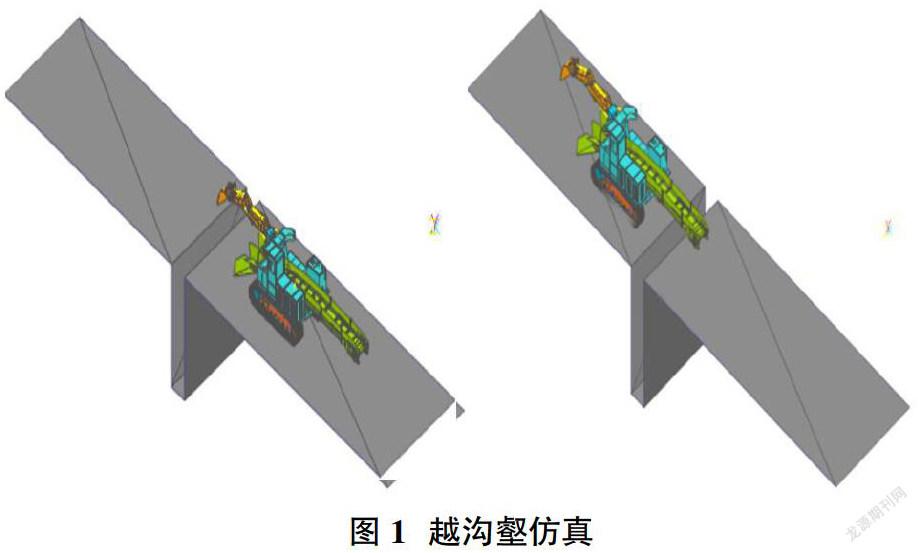
挖掘式装载机跨越沟壑的关键因素包括结构、重心等参数,此外还要确保输送板不与地面接触。当其重心位置达到沟壑边界线,而前引导轮处还未接触沟壑的另一边界时,挖掘式装载机开始倾斜。若此时挖掘式装载机匀速前进,则下落过程可近似看做成平抛运动。挖掘式装载机在倾斜的过程中,引导轮下端到达沟壑的另一边,支撑柱挖掘式装载机,如果挖掘式装载机在力作用下可以从倾斜状态恢复到水平状态,则挖掘式装载机就能跨越沟壑。挖掘式装载机越沟壑主要分为三个阶段,如图1所示。
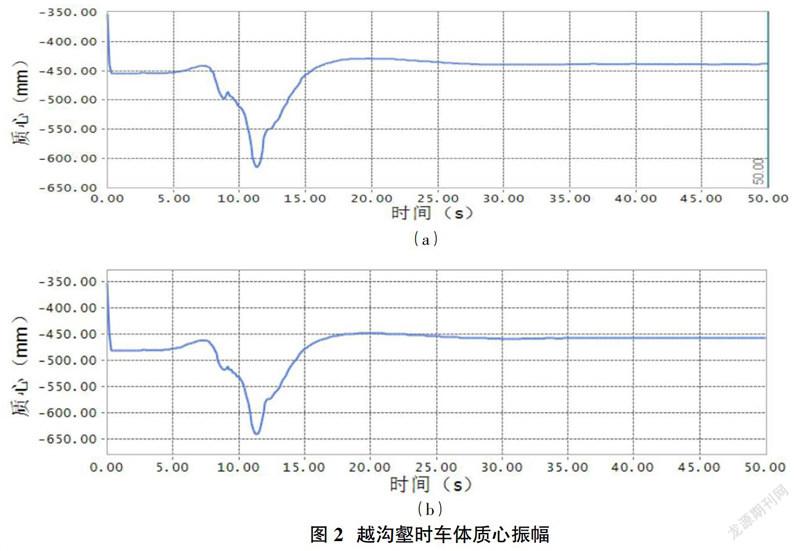
图1为摆臂伸长时挖掘式装载机的越沟壑极距离,宽度约为1050mm,行驶速度为0.6m/s。当摆臂收起时,挖掘式装载机整体的重心会发生变化,因此越沟壑的极限距离也会产生变化。但是由于摆臂占挖掘式装载机重量比例非常小,摆臂伸长和收缩时的重心偏差也非常小。导致这两种情况摆臂重心相对于车体置信的力矩差非常小,因此摆臂的位置对越沟壑的能力影响不大。经试验测得摆臂收缩时,挖掘式装载机的越沟壑极限距离约为1050mm,和摆臂伸长时的极限越沟壑距离相同,摆臂伸长和收缩时车体直行在垂直方向的振幅如图2(a)、图2(b)所示,可以看出这两种情况下车体振幅几乎没有差别,越沟壑结束后能够车体保持稳定运行。
2.2 越台阶实验与分析
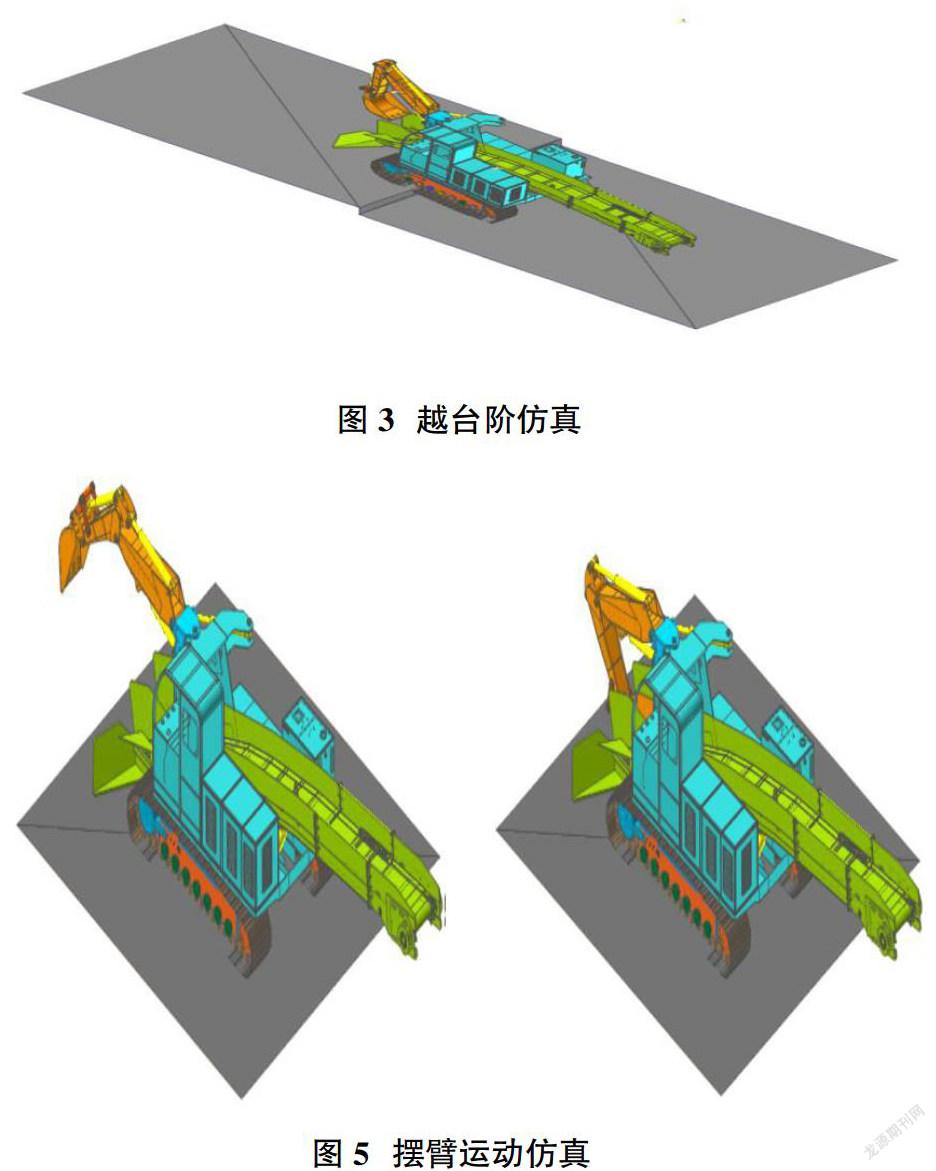
挖掘式装载机在实际工作路面经常会遇到一些突起物体,将突起障碍物近似为台阶进行仿真,因此攀越台阶的极限高度是挖掘式装载机越障性能的一个重要参数。如图3所示为挖掘式装载机在攀越台阶过程中的截图,可以看出输送板的高度对攀越台阶的能力有很大影響。
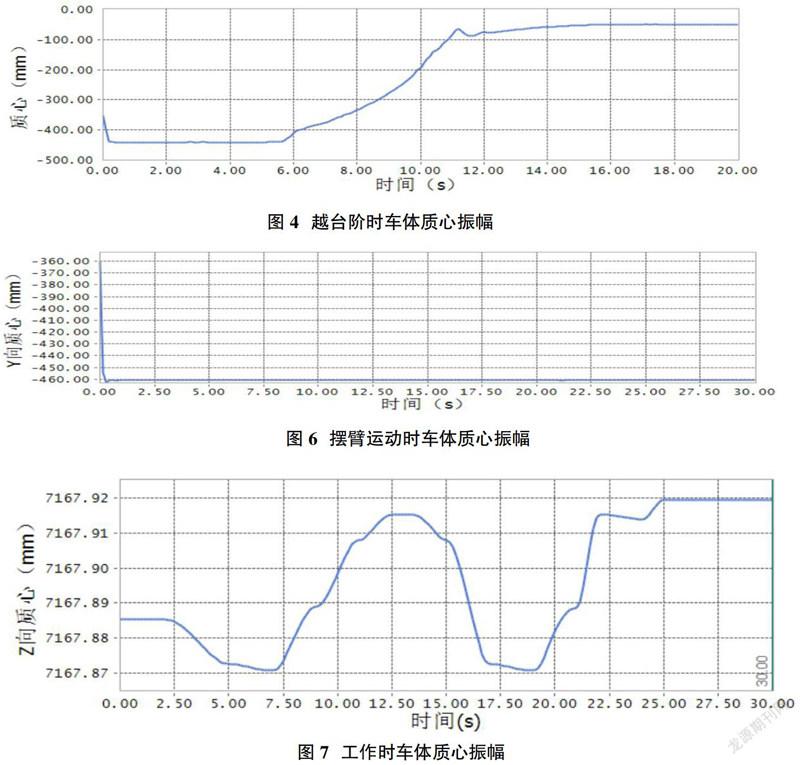
在保证输送板前后不与台阶和地面接触的前提下,此次仿真的速度为0.6m/s,最大越台阶高度为370mm,土壤沉陷170mm,实际高度200mm。车体质心在垂直方向的振幅如图4所示,可以看出挖掘式装载机在攀越台阶的过程中车体产生较大的抖动,攀越台阶完成后,挖掘式装载机很快稳定下来,保持稳定行驶。
2.3 摆臂系统的实验与分析
当挖掘式装载机开始工作时,行走机构处于静止状态,X方向位移为0,此时摆臂在工作中不停运动,会对车体的稳定性产生影响。如图5所示为摆臂从开始工作到收起的仿真截图。
车体质心在Y方向和Z向的变化分别如图6、图7所示,在0-2.5s之间车体因重力作用落到地面上,Y轴垂向质心位置产生较大波动、Z向保持不变。之后Y方向质心不再变化。2.5-25s内包含了摆臂从工作到收起的一系列动作,过程中Z方向产生了非常微小的变化,摆臂动作停止后Z向也稳定下来。可以看出摆臂的运动对车体质心几乎毫无影响。
3 总结
根据上述实验现象,可以得出结论掘式装载机在越过台阶和沟壑时可以表现出极大的稳定性,分析出其运行的稳定性和最佳越障性能,为采装机越障时质心位置的控制提供了理论依据,符合最终实验预计要求。
参考文献:
[1]冯忠续.工程机械理论[M].北京:人民交通出版社,2004.
[2]喻凡,林逸主编.汽车系统动力学[M].第一版.机械工业出版社,2005,9.
[3]刘巧伶.理论力学[M].长春:吉林科学技术出版社,1998.
[4]刘义.RecurDyn多体动力学仿真基础应用与提高[M].北京:电子工业出版社,2013.10.
猜你喜欢
新作文·小学低年级版(2019年4期)2019-04-27 01:47:06
湖南教育·C版(2018年8期)2018-08-22 19:01:50
劳动保护(2018年5期)2018-06-05 02:12:02
小猕猴学习画刊·下半月(2018年11期)2018-05-14 13:34:43
数学大王·低年级(2017年9期)2017-09-18 21:20:12
中国卫生(2015年12期)2015-11-10 05:13:26
小说月刊(2015年11期)2015-04-23 08:47:31
发明与创新(2015年1期)2015-02-27 10:38:28
数学大王·低年级(2013年9期)2013-04-29 00:44:03
小猕猴智力画刊(2013年1期)2013-03-15 05:36:18