基于动态路面特征的并联式混合动力汽车驱动力控制策略研究
2021-09-10 07:22:44张亮赵珂倩
内燃机与配件 2021年12期
张亮 赵珂倩
摘要:为了提高并联式混合动力汽车加速时的动力性与稳定性,提出了一种基于电机力矩动态调节的动态牵引力控制策略,所建立的控制策略基于路面最优滑转率的实时估计,通过电机力矩的动态调节来控制驱动轮的动态牵引力以提高加速性能并抑制过度滑转,对动态牵引力控制与能量管理的算法融合问题进行了研究,以避免动态牵引力控制对能量管理策略的干扰。最后,在MATLAB/Simulink环境中进行了系统仿真验证,结果表明所提出的控制策略显著地改善了车辆的加速性与行驶稳定性,同时还可以实现能量回收,可以有效提高了系统的节能效果。
Abstract: In order to improve the power performance and stability of parallel hybrid electric vehicle when accelerating, a dynamic traction control strategy based on dynamically adjusting the motor torque was proposed along with its system simulation. The presented strategy is established on the optimal slip ratio real time estimation, while the dynamic traction of driving wheel is controlled by adjusting the motor torque to improve the accelerating ability and preventing the excessive slip of driving wheel. In addition, the algorithm fusion between dynamic traction control strategy and energy management strategy is researched to avoid interference with energy management strategy. Finally system simulation was carried out in the environment of MATLAB/Simulink, and the results indicate that the proposed control strategy can observably improve the vehicle accelerating ability and driving stability, meanwhile, it can realize energy recycle and improve the energy-saving effect to some extent.
關键词:混合动力汽车;动态牵引力控制;路面识别;系统仿真
Key words: hybrid electric vehicles;dynamic traction control;road surface identification;system simulation
中图分类号:U461.2 文献标识码:A 文章编号:1674-957X(2021)12-0005-03
0 引言
能量管理控制与动力学控制是混合动力汽车(Hybrid electric vehicles,HEVs)综合控制策略的两大核心内容,其中能量管理控制所关注的是如何实现节能和降低排放[1],而动力学控制解决的问题是如何将驾驶员踏板信号合理地解释为执行机构的目标力矩。当前HEV综合控制现有的研究较多地集中在了能量管理方面[2-5]。
目前,动力性与操控稳定性方面专门针对新能源汽车的研究尚不多见,尽管已有一些学者针对传统内燃机汽车的动力学控制方面进行了大量的研究[6-9],但是混合动力汽车与内燃机汽车有本质的不同。与传统内燃机车相比,混合动力汽车增加了电机驱动方式,使其控制更灵活、动态响应更佳。本文采用并联式混合动力传动方案,研究重点是汽车的加速工况下,随路面参数变化的动态牵引力控制策略及与能量管理策略的算法相融问题,最后在MATLAB/Simulink软件中进行了系统仿真验证。
1 系统结构
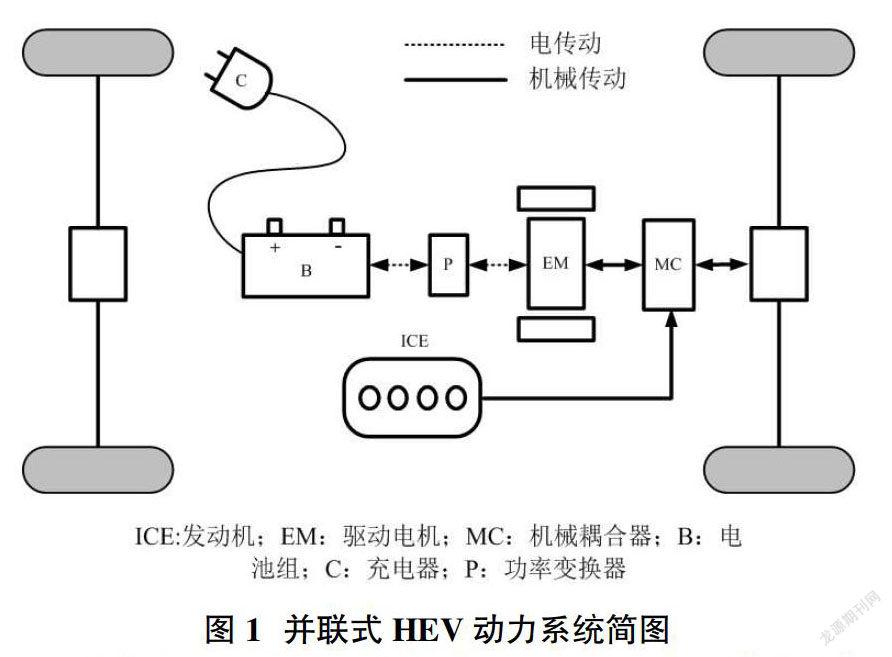
并联式HEV的动力总成系统结构如图1所示[9],电动机由电池组供电输出扭矩,并与发动机通过MC(机械耦合器)进行扭力耦合继而进行动力输出。相对于其它形式而言,并联式HEV结构相对简单,有利于在保证动力性要求的前提下实现较为紧凑的动力总成系统,适合应用在新能源轿车中。
2 控制策略
动态牵引力控制主要通过调节驱动轮的滑转率以最大限度地利用地面附着条件,具体来说,动态牵引力控制是将驱动轮滑转率控制在最优滑转率附近,从而实现整车良好的加速性和操控稳定性。因此路面参数的动态识别是牵引力控制的第一步。
驱动轮滑转程度可以用滑转率λ表示,地面附着系数?滋随λ的变化而变化。地面附着系数(横、纵向)达到最高值的滑转率为最优滑转率?姿opt,此时地面附着条件利用率最高。但是不同路面条件下的最优滑转率各不相同,必须通过路面参数进行识别算法来获取不同路面条件下理想的牵引力控制依据。
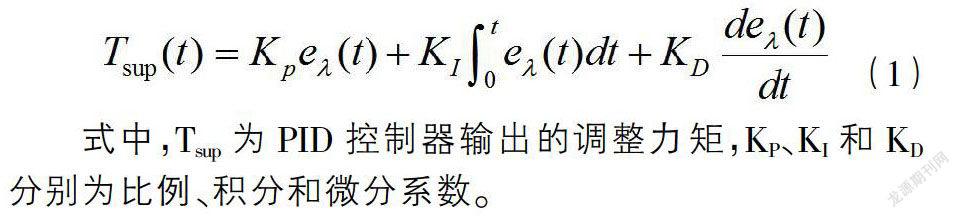
首先,ECU单元通过车速、车轮转速传感器测量、计算得到车轮实际滑转率,通过与最优滑转率相对比,将两者差值e?姿最为PID控制器的输入。其表达式为:
式中,Tsup为PID控制器输出的调整力矩,KP、KI和KD分别为比例、积分和微分系数。
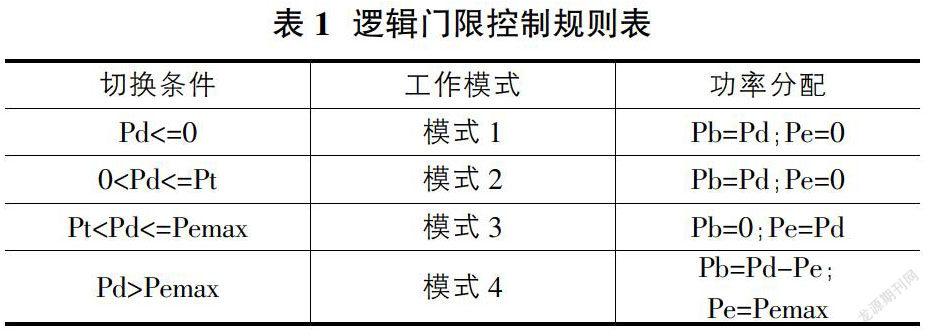
能量管理策略是混合动力电动汽车实现良好节能效果的关键,控制策略通常根据踏板位置判定电动机目标转矩,并对电能供应的功率流进行优化,已有许多学者对其进行了深入研究,目前较为成熟的是逻辑门限控制策略、模糊控制策略等,此处主要关注的是所提出的动态牵引力控制与能量管理策略的融合,因此不对能量管理策略进行重复分析,而是直接选用鲁棒性较强且易于实现的逻辑门限控制策略,并提出一个基本的逻辑门限控制算法。以需求功率为主要门限,将其划分为再生制动(模式一)、电机单独驱动(模式二)、发动机单独驱动(模式三)以及发动机和电机混合驱动(模式四)。逻辑门限控制规则如表1所示。其中,Pd为功率需求、Pb为电动机输出功率、Pe为发动机输出功率和Pemax为发动机最大输出功率,Pt为功率门限值。
牵引力控制系统仅在加速工况下工作,ξd为牵引力控制系统控制参数,当汽车处于加速工况时,ξd为1;当非加速工况(加速踏板γA低于门限值或变化率为负)时ξd为0,牵引力控制系统不生效。此外,当控制器调整力矩为正值时,电动机最终输出转矩将大于汽车预期转矩,干扰能量控制策略,因此调整力矩一般取负值。汽车行驶时能量管理策略根据驾驶员踏板信号产生一个的前馈控制力矩作为电机力矩控制的主力矩;当轮胎突破地面附着极限时,牵引力控制系统介入,在融合算法中,将根据地面附着条件所得到的控制器调整转矩与能量管理策略分配的电机转矩相加之后,作为电机最终输出转矩,公式(2)。由于调整力矩取负值,动力系统输出降低,但滑转率被控制在一个最佳区间,地面附着条件利用率更高。
3 仿真分析
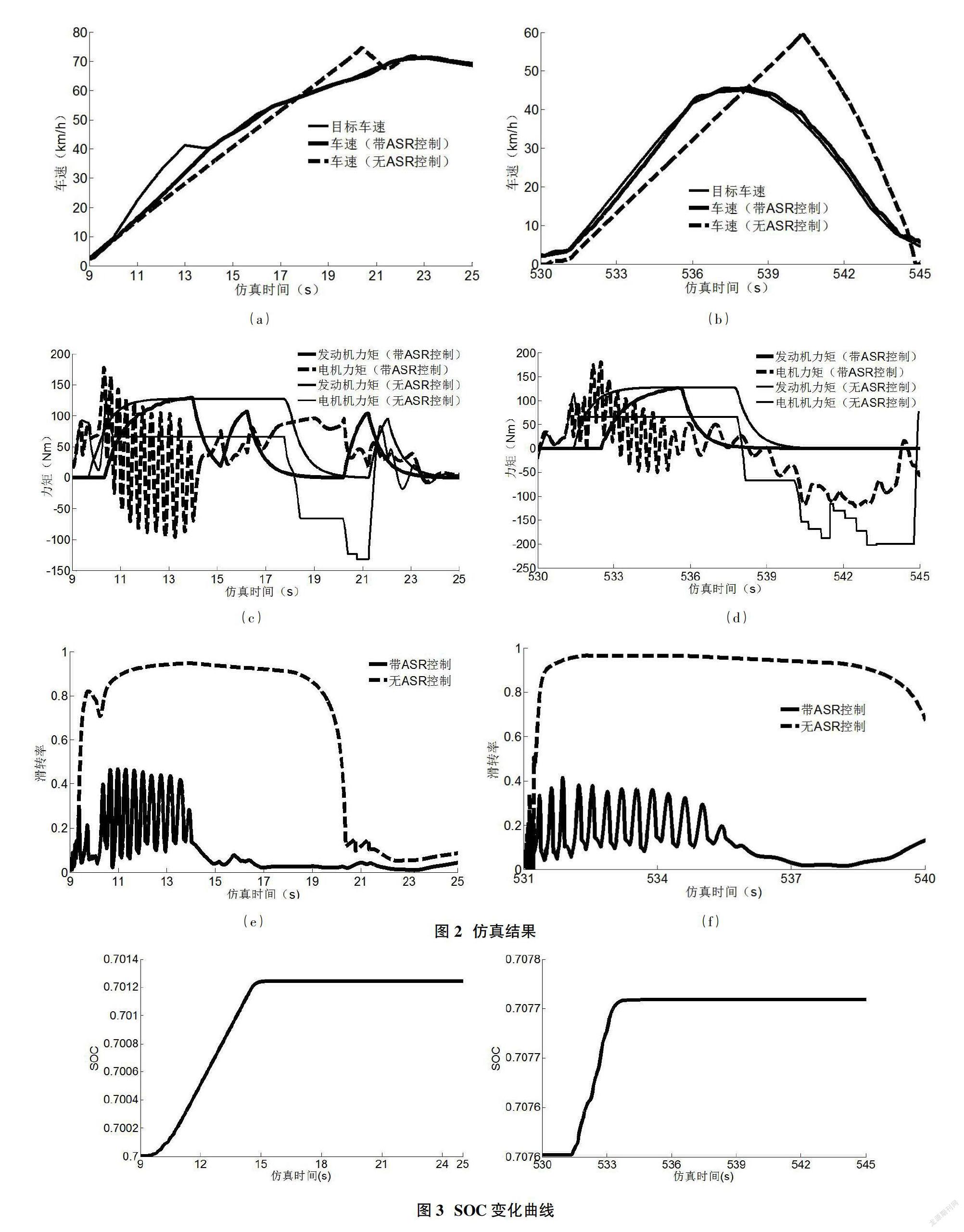
通过MATLAB/Simulink进行控制系统仿真,籍此验证牵引力控制策略的有效性及与能量控制策略的相融性。仿真时采用固定步长0.01秒,仿真采用加速较频繁的US06循环工况作为仿真工况。
选取循环工况中的两个加速阶段进行分析,如图2所示。从图中滑转率的变化结果可以看出,在所设计的牵引力控制策略作用下,驱动轮的滑转率被控制在一个较优区域内,与不具备牵引力动态控制的系统相比,所提出的控制算法明显抑制了车辆加速过程中驱动轮的过度滑转,同时,由于改善了滑转率,从速度曲线的变化结果中可以看出在动态牵引力控制下车辆的加速性能也得到了明显提升,并且在加速阶段的后期没有出现车速的超调现象,控制效果良好,体现出了对目标车速的良好跟随。
由力矩变化曲线可知,在牵引力控制系统工作时,主要通过调节电机输出转矩对滑转率进行控制,而发动机转矩变化较为平稳,并没有对牵引力控制系统造成干扰,这表明所设计的融合算法是有效的。图3的SOC变化曲线表明,在牵引力控制系统工作过程中,能量得到了一定程度的回收,电池SOC在两个加速阶段分别上升了0.19%和0.02%,所本文所采用的是22.6kWh容量锂离子电池组,因此可以算的在两次的加速过程中,由于电机施加了负力矩而产生的电能回收约为0.043kWh。
4 结论
提出了一种基于路面识别的混合动力汽车控制策略,可以有效实现车辆的ASR控制且提高车辆节能效果,在一次ASR控制过程中电池组SOC可以上升约0.20%,汽车的加速性能显著提高,且牵引力动态控制策略与能量管理策略融合性较好,实现了加速时的驱动轮防滑控制目标。
参考文献:
[1]Kim N, Cha S and Peng H. Optimal Control of Hybrid Electric Vehicles Based on Pontryagin’s Minimum Principle [J]. IEEE Transactions on Control Systems Technology. 2011,19(5): 1279-1287.
[2]Zeyu Chen, Jiahuan Lu, Bo Liu, Nan Zhou, Shijie Li. Optimal energy management of plug-in hybrid electric vehicles concerning the entire lifespan of lithium-ion batteries. Energies, 2020, 13, 2543.
[3]Martinez J S, Hissel D, Pera M C, et al. Practical Control Structure and Energy Management of a Testbed Hybrid Electric Vehicle [J]. IEEE Transactions on Vehicular Technology. 2011, 60(9): 4139-4152.
[4]Pousamed A, Montazeri M. Design of genetic-fuzzy control strategy for parallel hybrid electric vehicles [J]. Control Engineering Practical. 2008,16(7): 861-873.
[5]Geng B, Mills J K and Sun D. Energy Management Control of Microturbine-Powered Plug-In Hybrid Electric Vehicles Using the Telemetry Equivalent Consumption Minimization Strategy [J]. IEEE Transactions on Vehicular Technology. 2011,60(9): 4238-4248.
[6]陳泽宇,焦斌,赵广耀,周淑文.电动汽车动态路面驱动防滑控制与仿真[J].哈尔滨工程大学学报,2015,36(8):1120-1125.
[7]Deur J, Pavkovic D, Burgio G, et al. A model-based traction control strategy non-reliant on wheel slip information [J]. Vehicle System Dynamics, 2011, 49(8):1245-1265.
[8]李亮,冉旭,李洪志,等.用于汽车牵引力控制的复杂路面轮胎-道路附着状态判断[J].机械工程学报,2012,48(10):109-114.
[9]陈清泉.现代电动车、电机驱动及电力电子技术[M].北京:机械工业出版社,2005.
猜你喜欢
大陆桥视野·下(2016年11期)2017-02-28 22:43:28
科教导刊(2016年33期)2017-02-27 11:00:52
汽车工程学报(2016年5期)2017-01-16 02:25:57
汽车工程学报(2016年6期)2017-01-11 17:35:29
预测(2016年3期)2016-12-29 18:57:28
航空兵器(2016年4期)2016-11-28 21:34:37
中国科技博览(2016年10期)2016-04-29 05:26:16
科技与创新(2015年23期)2015-12-08 22:29:11
现代电子技术(2015年22期)2015-12-02 21:44:41
物联网技术(2015年5期)2015-07-18 14:04:12