轮毂电机电动汽车ASR仿真研究
2021-09-10 07:22:44刘晶晶唐阳山
内燃机与配件 2021年15期
刘晶晶 唐阳山

摘要:车辆在起步或加速时容易发生打滑,驱动防滑控制系统可将驱动轮的滑转率控制在最佳范围内,避免车辆打滑。文章根据驱动防滑控制原理,在simulink中建立了整车模型、电机模型和驾驶员模型,设计了驱动轮防滑控制器,并与carsim进行联合仿真,仿真结果表明,所设计的驱动轮防滑控制器能够有效控制滑转率,防止汽车打滑。
Abstract: The vehicle is prone to slip when starting or accelerating. The driving Acceleration Slip Regulation control system can control the slip rate of the driving wheel in the best range to avoid vehicle slip. According to the principle of drive anti-skid control, the vehicle model, motor model and driver model are established in simulink. The anti-skid controller of drive wheel is designed and co-simulated with carsim. The simulation results show that the designed anti-skid controller of drive wheel can effectively control the slip rate and prevent the car from slipping.
關键词:电动汽车;驱动防滑;滑转率;联合仿真
Key words: electric vehicle;driving anti-slip;slip rate;joint simulation
中图分类号:U469.72 文献标识码:A 文章编号:1674-957X(2021)15-0007-02
0 引言
电动汽车驱动防滑控制(ASR)系统主要是将驱动轮的滑转率保持在适当的范围内,使车辆即使在恶劣路面上仍具有较强的加速性能和行驶稳定性能[1],从而保证汽车行驶时的安全性。对于轮毂电机驱动的电动汽车,由于轮毂电机不仅具有响应速度快、控制精度高等优点,同时还可以获取实时转速和转矩信息,在驱动防滑控制方面有着先天的优势。所以针对轮毂电机驱动电动汽车的独特优势,设计了轮毂电机驱动防滑控制策略。
1 carsim建立整车动力学模型
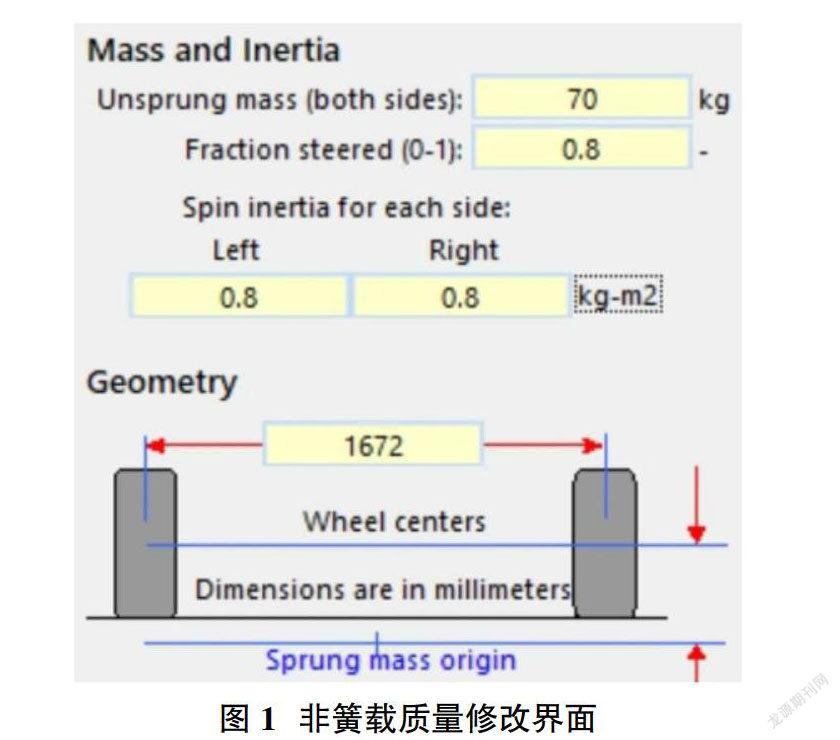
在carsim中选择B-Class作为仿真用基准车,本研究为直线行驶的驱动防滑控制,所以carsim中的空气动力学、转向系统、制动系统均采用原B级车默认值,不做改变。修改动力传动系统,将动力传动系统改为四轮驱动(4-Wheel system),将内部动力输入如发动机、差速器、变速器等全部改为外部输入[2]。因为要将传统车改为轮毂电机驱动的电动汽车,所以相应的增大非簧载质量和车轮转动惯量,如图1。
2 ASR控制系统模型
2.1 整车模型 本文根据控制策略需要,建立整车七自由度模型。七个自由度分别为车身的纵向运动、侧向运动和横摆运动以及四个车轮纵向旋转运动。对该模型做出如下假设:路面为水平路面;车辆坐标系原点与车辆质心重合;忽略车辆的垂直弹跳、俯仰运动和侧倾运动;忽略空气阻力和滚动阻力;左右轮转向角始终相等[3]。
纵向运动方程:
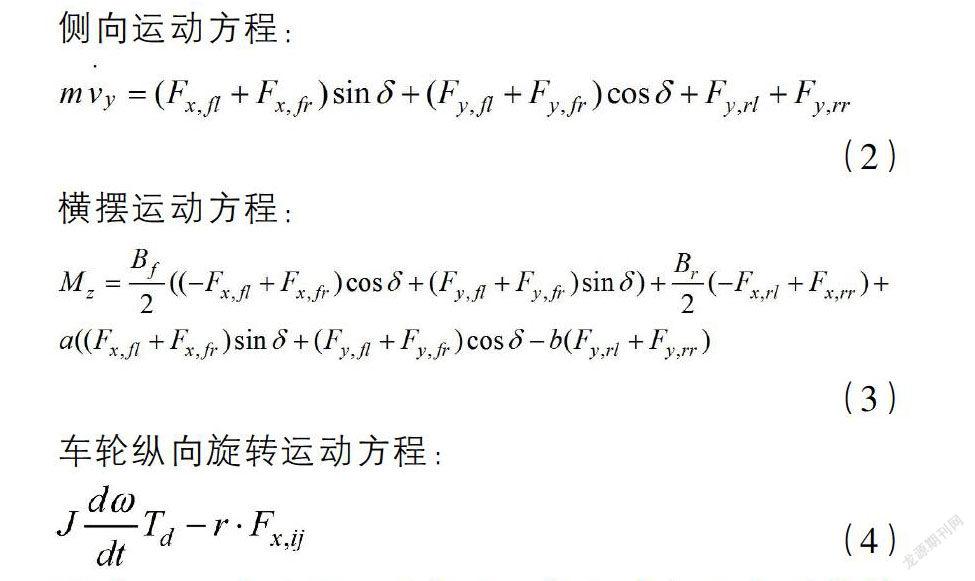
侧向运动方程:
横摆运动方程:
车轮纵向旋转运动方程:
式中,vx、vy为车辆行驶纵向、侧向速度;δ为前轮转角;Fx,ij、Fy,ij为各车轮的纵向力和侧向力;Mz为绕Z轴的旋转力矩;Bf、Br为前、后轮轮距;a、b为质心到前、后轮的轮距;J为车轮转动惯量;ω为车轮转速;Td为轮毂电机输出的驱动力矩。
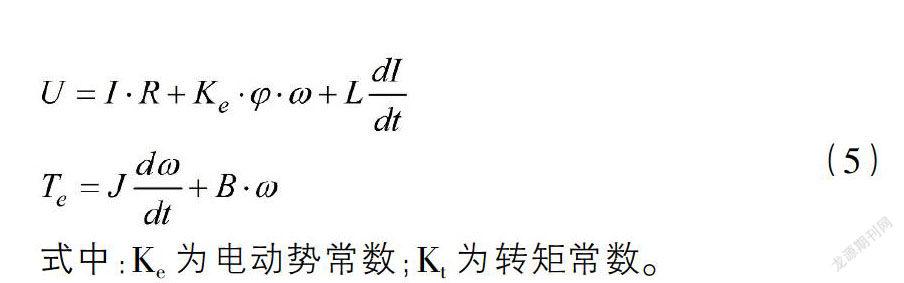
2.2 轮毂电机模型 本文轮毂电机采用无刷直流电机,其数学表达式为:
式中:Ke为电动势常数;Kt为转矩常数。
2.3 驾驶员模型 驾驶员模型是通过对驾驶员行为分析,建立相关模型来反映真实驾驶情况下驾驶员对车辆的操作[4]。根据本文控制策略需求,只建立简单的速度跟踪驾驶员模型,采用PI控制算法,输入为目标车速与实际车速的差,输出为驾驶员目标力矩。
3 驱动轮防滑PID控制器
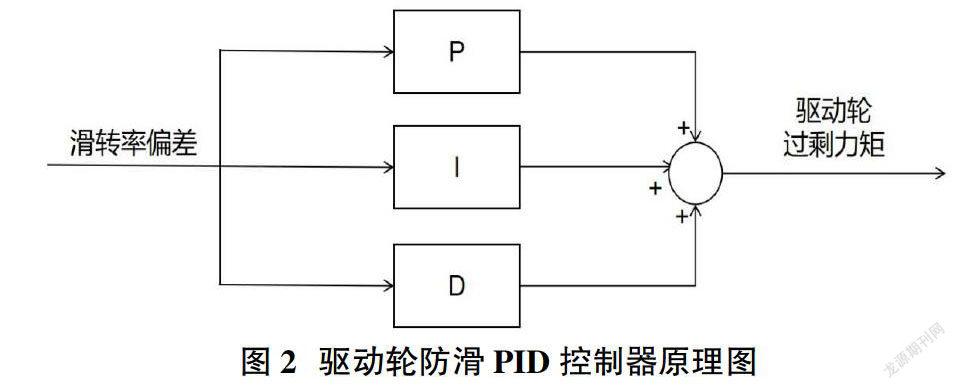
本文所设计的驱动轮防滑控制器根据PID控制原理,控制器输入为驱动轮滑转率偏差(实际滑转率与最优滑转率的差),输出为驱动轮过剩力矩。通过调节合理的P、I、D的值,将驱动轮滑转率控制到最优滑转率附近。
驱动轮防滑PID控制器的原理图如图2。
4 carsim/simulink联合仿真
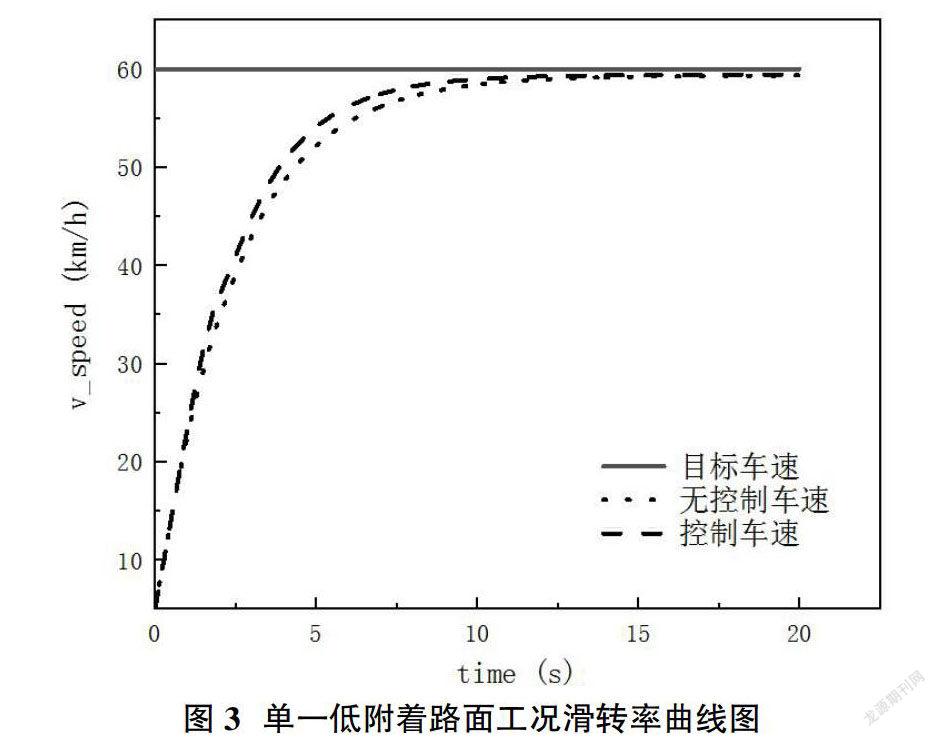
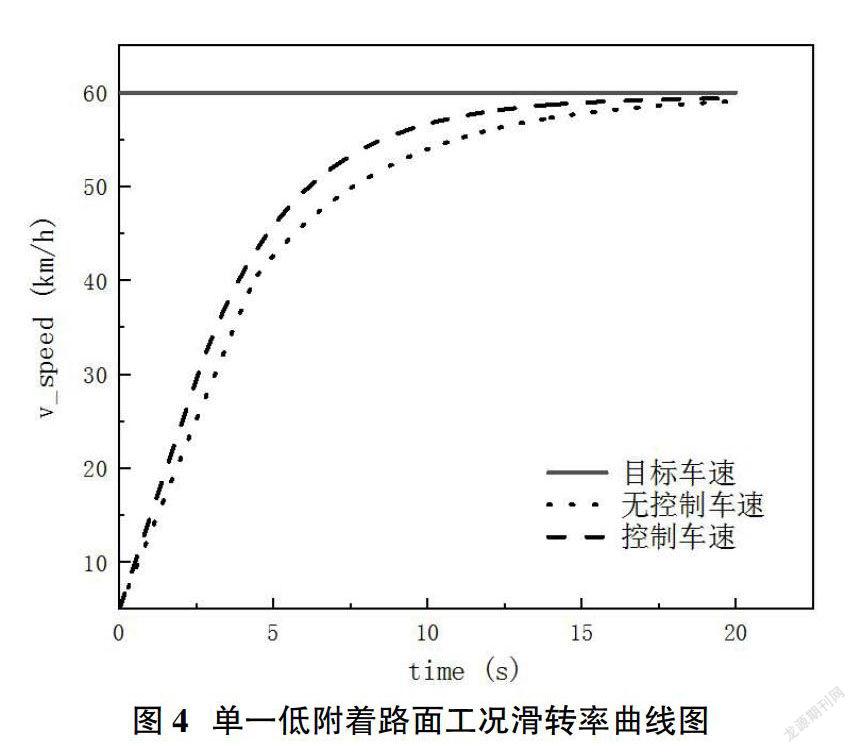
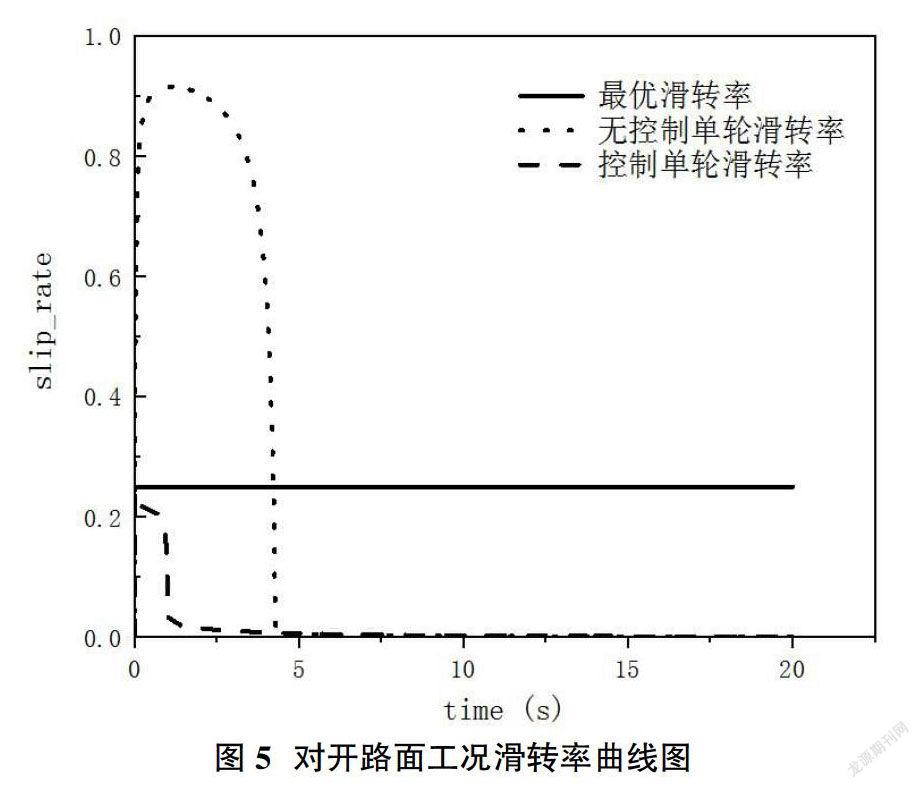
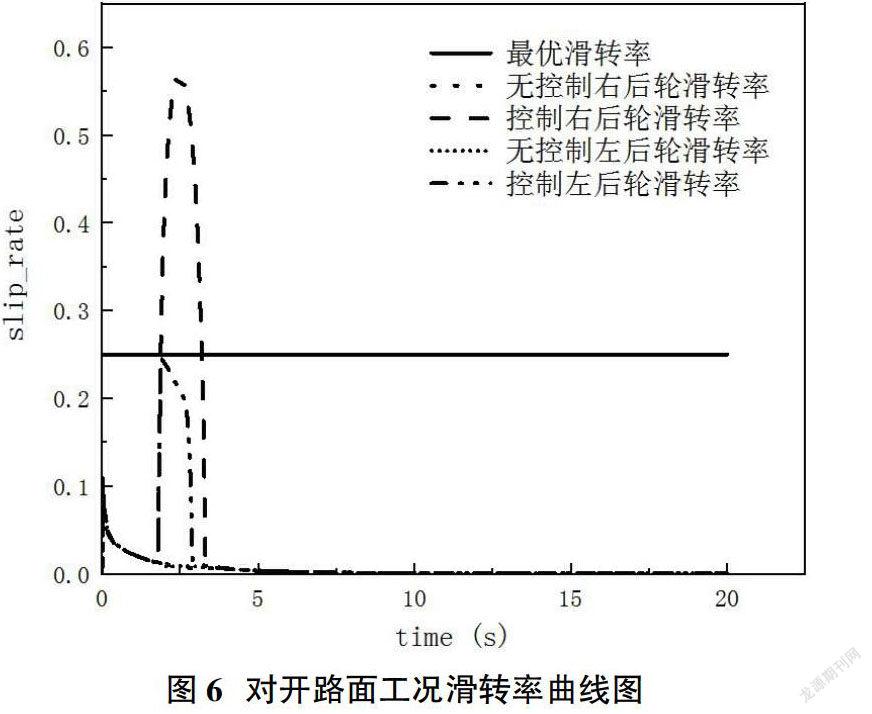
根据设计,将需要修改的参数输入到carsim中,并在carsim中设置单一低附着路面仿真工况和对开路面仿真工况,与simulink中建立的模型联合起来进行仿真。仿真结果如图3-图6。
由图3-图6曲线可以看出,加入驱动防滑控制后车辆跟随效果更好,车辆加速效果更好,滑转率也有明显下降,控制策略具有一定作用。
5 结论
汽车起步或加速行驶时,若驾驶员踩踏板的开度很大,会给车辆很大的驾驶员需求力矩,车辆则会发生打滑现象,尤其是在冰雪路面。装了驱动防滑控制系统的汽车可以很明显的降低车辆驱动轮的滑转率,提高加速性能,提高车辆行驶的安全稳定性与动力性。
参考文献:
[1]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2016(9):130.
[2]马高峰,李刚,韩海兰.基于CarSim的四轮轮毂电机电动汽车建模方法研究[J].农业装备与车辆工程,2015,53(07):8-11.
[3]Tian Hao. Research on Anti Slip Control of Wheel Motor Vehicle Drive[D]. Jilin: Jilin University, 2000:13.
[4]靳彪,张欣,彭之川,等.四轮轮毂电机驱动电动汽车建模与仿真[J].中国公路学报,2016,29(4):138-144.
猜你喜欢
中国农机化学报(2024年5期)2024-05-30 23:51:14
汽车维修与保养(2021年8期)2021-02-16 00:28:32
重庆交通大学学报(自然科学版)(2020年8期)2020-08-24 00:59:34
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:47:46
农机化研究(2018年10期)2018-08-10 09:23:02
科技创新导报(2016年24期)2017-03-13 02:52:42
科学与财富(2016年32期)2017-03-04 20:04:05
计算机教育(2016年8期)2016-12-24 10:26:06
海外星云(2016年17期)2016-12-01 04:18:42
汽车工程学报(2015年1期)2015-04-13 09:12:50