
多相感应电机开路故障情况下的分析与研究
2021-09-10 07:22:44骆海燕
交通科技与管理 2021年2期
骆海燕

摘 要:多相感应电机因其优越的容错性能,非常适用对运行系统的可靠性要求很高的大功率工业应用场合。本文以七相感应电机为研究对象,通过MATLAB/Simulink仿真软件,对七相感应电机不同缺相故障进行仿真数据研究,并在此基础上分析了多相感应电机开路故障下的性能特点及研究。
关键词:多相感应电机;开路故障;缺相;MATLAB仿真
0 引言
由于目前大功率电力电子技术的快速发展,在某些对运行系统的可靠性要求很高的工业应用场合,当电机在运行中出现电机本体故障和逆变器故障等,即发生缺相情况后,将造成整个电机推进系统可靠性的下降,本文主要研究的是电气方面的故障,即定子绕组发生故障时,感应电机则变成了缺相运行,传统的三相异步电动机其可靠性就大大下降,且基本无法运行。而多相电机调速系统在故障下能维持系统继续运行的特点,为保证系统在电机发生缺相情况下仍可以继续较为稳定地运行,研究其故障下的特性,并借鉴成熟的三相变频技术,提高功率输出的同时并保证系统的可靠性。
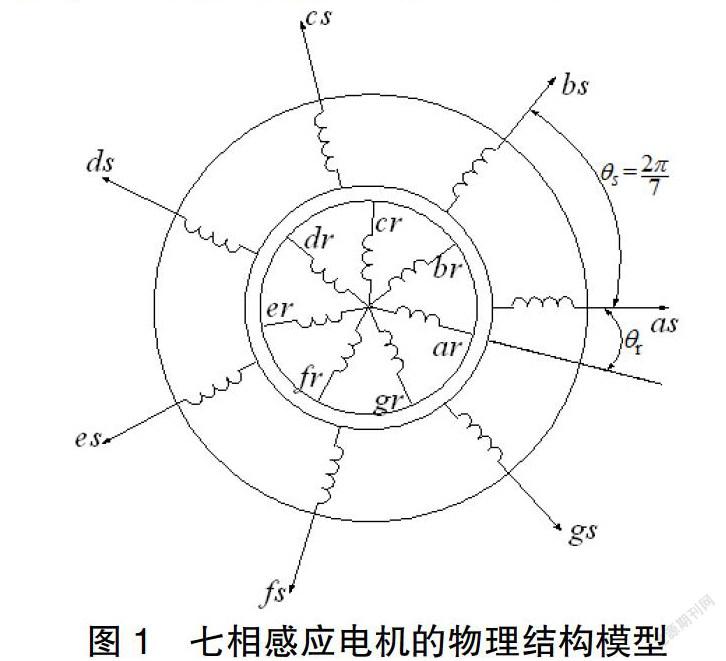
本文研究的七相感应电机的物理结构模型如图1所示。电机定子侧绕组在空间上均匀分布,各绕组在空间位置上互差角度[1]。转子绕组采用标准鼠笼型结构,构建物理模型时,其在空间位置上也互差角度,其中定子绕组与转子绕组之间的空间位置角定义为。
1 七相感缺相数学模型
多相感应电机绕组由于缺相变成完全不对称,不能再用正常时的电机数学模型进行分析。下面建立其缺相情况下的电机数学模型。
七相感应电机定子绕组最后一相g相开路时,此时电机进入不对称运行状态,为了降低电机缺相后定子绕组的不平衡度,借鉴正常情况下七相感应电机数学模型的等效思想,可以将其看成一个六维的系统,对其建立数学模型[2]。
经过数学整理后,构成了七相感应电机缺一相后的数学模型。
从缺g相后的数学模型可以看出,正常情况下电机定转子互感的α轴分量Lmα和β轴分量Lmβ是相等的,但缺相后由于电机结构和空间位置进行了变化,此时α軸分量Lmα和β轴分量Lmβ已经不再相等,这是由于电机某一相缺失后,电机绕组在空间结构已经发生了改变,剩余相绕组的合成定子漏感对比正常情况时也已经完全不同,这将导致定子磁链轨迹不再为圆形,将变为椭圆形,并且随着所缺相数的增多,Lmα与Lmβ差别程度通常呈变大趋势[3]。
2 七相感应电机缺相运行仿真
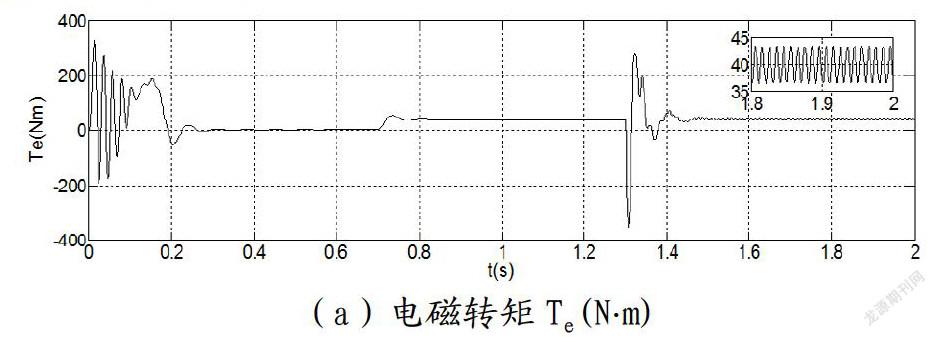
在MATLAB/Simulink下对七相感应电机正常运行时建模,设置感应电机仿真参数为:转动惯量J=0.144 kg⋅m2,极对数Np=2,额定频率fN=50 Hz,定子电阻Rs =0.567 3 Ω,转子电阻Rr =1.123 Ω,定子电感Ls =0.226 8 H,转子电感Lr=0.226 8 H,定转子互感Lm= 0.216 H,定子自漏感Lls=0.009 7 H。系统仿真总时间设置为2 s,空载起动,在0.7 s时加载40 N·m,在1.3 s时利用一个阶跃信号,模拟电机突然缺一相的情况,切除电机g相绕组。图2是七相感应电机缺g相运行时不控情况下的仿真波形图。
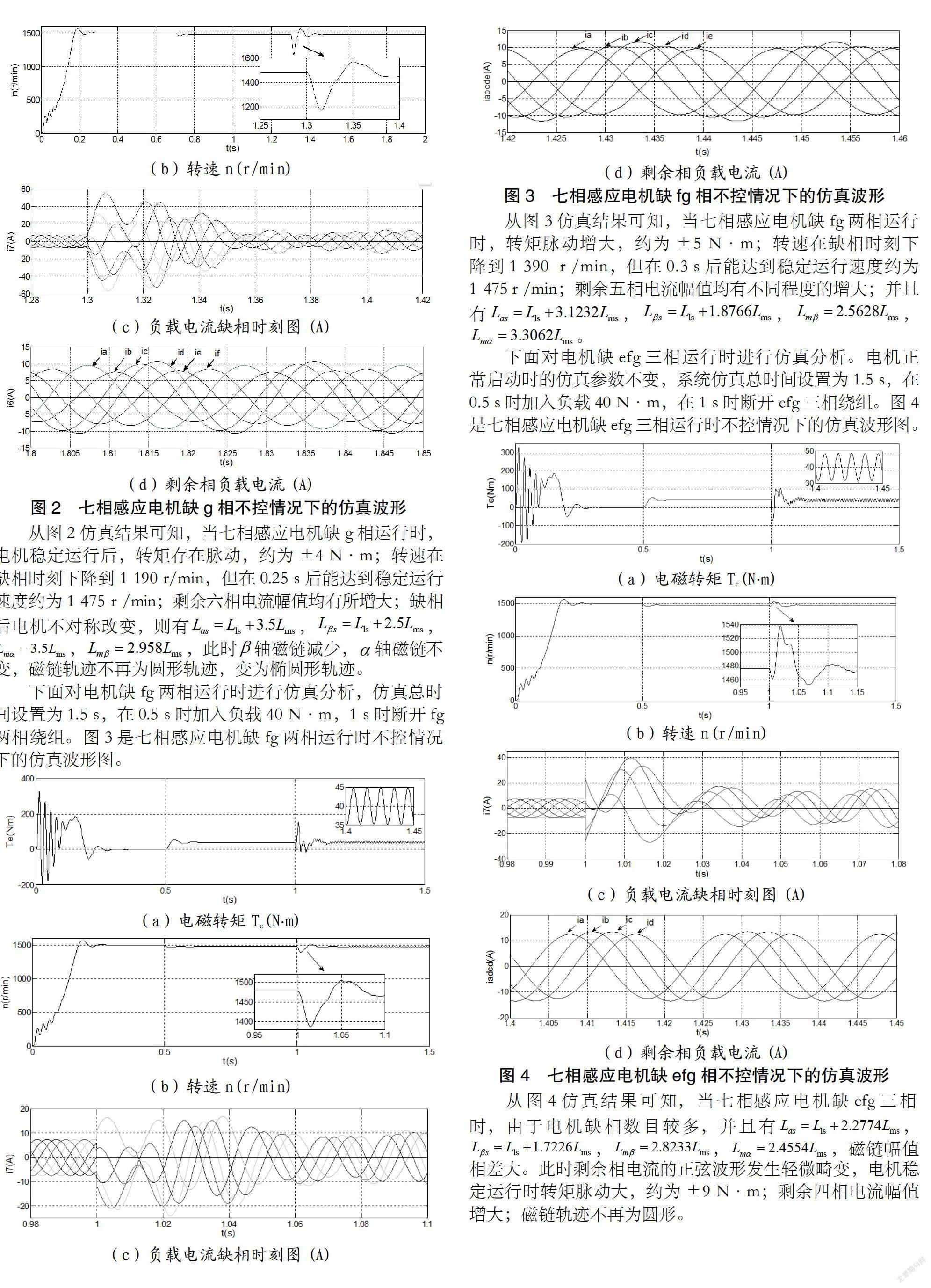
从图2仿真结果可知,当七相感应电机缺g相运行时,电机稳定运行后,转矩存在脉动,约为±4 N·m;转速在缺相时刻下降到1 190 r/min,但在0.25 s后能达到稳定运行速度约为1 475 r /min;剩余六相电流幅值均有所增大;缺相后电机不对称改变,则有,,,,此时轴磁链减少,轴磁链不变,磁链轨迹不再为圆形轨迹,变为椭圆形轨迹。
下面对电机缺fg两相运行时进行仿真分析,仿真总时间设置为1.5 s,在0.5 s时加入负载40 N·m,1 s时断开fg两相绕组。图3是七相感应电机缺fg两相运行时不控情况下的仿真波形图。
从图3仿真结果可知,当七相感应电机缺fg两相运行时,转矩脉动增大,约为±5 N·m;转速在缺相时刻下降到1 390 r /min,但在0.3 s后能达到稳定运行速度约为1 475 r /min;剩余五相电流幅值均有不同程度的增大;并且有,,,。
下面对电机缺efg三相运行时进行仿真分析。电机正常启动时的仿真参数不变,系统仿真总时间设置为1.5 s,在0.5 s时加入负载40 N·m,在1 s时断开efg三相绕组。图4是七相感应电机缺efg三相运行时不控情况下的仿真波形图。
从图4仿真结果可知,当七相感应电机缺efg三相时,由于电机缺相数目较多,并且有,,,,磁链幅值相差大。此时剩余相电流的正弦波形发生轻微畸变,电机稳定运行时转矩脉动大,约为±9 N·m;剩余四相电流幅值增大;磁链轨迹不再为圆形。
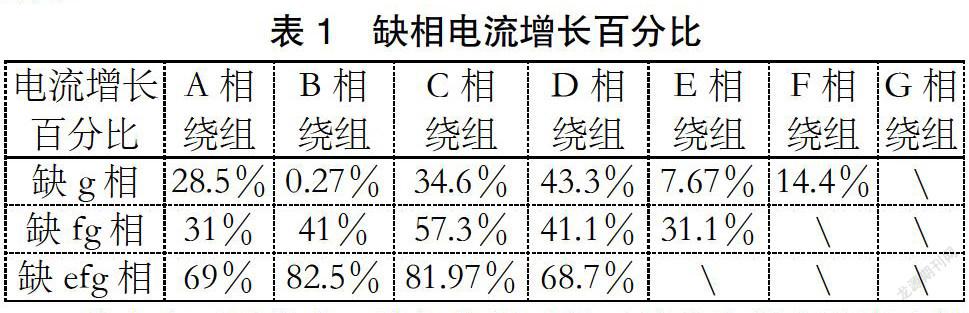
由上述仿真结果,进行电流增大比例数据分析,如表1所示。
从表中可以得出,缺相绕组对最远处的绕组电流影响最大,缺相后剩余相的电流幅值随着开路相数的增多,电流增大百分比随之升高,在缺相数目较多时,这将不利于电机的运行。
3 结束语
本文在已有多相电机系统的研究基础上,通过软件仿真研究分析七相感应电机在缺任意一相时,电机参数变化相似,转速和转矩脉动不大;当七相感应电机缺任意两相时,相互之间不构成正交两相,此时所缺两相夹角越接近0°或180°,α轴和β轴磁链幅值相差越大,产生的转矩和转速脉动就越大;当七相感应电机缺任意三相时,电机的不平稳度增加,转速和转矩脉动加大。仿真结果表明多相感应电机在发生故障后,拥有能够继续稳定运行的特点,为多相感应电机后续的分析研究提供一定的理论依据。
参考文献:
[1]郭冀岭.七相感应电机控制技术研究[D].西南交通大学,2015.
[2]魏永清.十二相永磁电机驱动系统的容错控制策略[J].电工技术学报,2019,34(21):4467-4473.
[3]宋百洋.九相感应电机对称缺相稳态运行研究[D].青岛大学,2019.
猜你喜欢
电力设备管理(2022年21期)2022-12-18 22:23:47
大电机技术(2018年4期)2018-09-26 03:11:28
现代情报(2016年11期)2016-12-21 23:33:46
科学与财富(2016年26期)2016-12-01 21:15:53
科技视界(2016年25期)2016-11-25 19:58:36
科技视界(2016年21期)2016-10-17 18:04:55
中国科技博览(2016年3期)2016-04-25 12:39:13
考试周刊(2016年11期)2016-03-17 05:33:40
西部广播电视(2015年1期)2016-01-15 02:05:37
电测与仪表(2015年13期)2015-04-09 11:57:36
