无人船在水下地形测量中的应用
2021-09-10 10:25邓友发
化工管理 2021年24期
邓友发
(大庆油田设计院有限公司,黑龙江 大庆 163712)
0 引言
近年来随着社会的发展,地理信息数据在国民经济发展、政府规划决策、人们日常出行中扮演越来越重要的角色。陆地地理信息数据的采集获取,随着科学技术的发展已经获得了长足的进步,涌现出了无人机摄影测量、三维激光扫描技术、GNSS卫星定位技术等新型高效测量技术,定位精度也越来越精确。水下地形数据的获取,却发展略显缓慢。水下地形测量传统的测量方式是利用有人船搭载测深仪和RTK进行测量或是直接人工下水测量,测量人员安全得不到保证,作业效率有待提高。针对上述情况,无人船测量系统在这种背景下应运而生,文章以某市所属泡泽治理工程为例,采用华测公司生产的新型华微3号无人测量船,结合基础地理信息数据(电子地图数据、地理实体数据、地名地址数据、影像数据等),生产出符合规范的全要素地形图。
1 无人船测量系统
新型华微3号无人船测量系统,是基于无人驾驶遥控船为载体,集成了控制系统,动力推进系统,无线通讯系统,卫星定位导航系统,测深系统等,采用新一代物联网主控,采用4 G模块通讯,彻底摆脱网桥基站、传输距离的限制,外业更轻松。船体采用双定位天线设计,船体姿态稳定可靠,结合IMU模块,可轻松穿越桥涵。
2 测区概况
测区位于大庆市萨尔图区,长约1.0 km,宽约0.7 km,水域面积较大,利于无人测量船作业,测区内分布有四个钻井平台,水深处约2~3米,靠近岸边地区水深约0.3米;如果使用有人测量船,水浅区域无法测量,使用简易橡皮筏子,测量效率低,作业人员人生安全也难以得到保证。新型华微3号无人测量船,体积小、重量轻、吃水浅,携带运输方便,结合RTK可进行无验潮水下地形测量,为本次测区水下地形成果交付发挥了至关重要作用[1]。
3 水下地形测量
3.1 获取测区转换参数
(1)已有资料:经现场调查勘验,本项目测区周边有保存完好的C级GPS控制点,利用测区周边的C008、CB11、C005、C004四个等级GPS控制点构建测区控制系统,并计算相应转换参数。计算结果如图1所示。
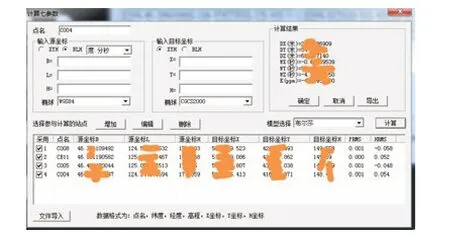
图1 转换参数计算结果
(2)将转换参数输入地面工作站手簿,并对转换参数精度的可靠性采用已知GPS控制点进行平面、高程校正并检查。精度统计结果如表1所示。

表1 精度统计结果表
3.2 边界获取及航线规划
从OpenstreetMap官网中提取该水面的轮廓线,将其文件导入奥维软件中,再通过坐标数据提取,获取水面的拐角坐标;地面工作站人员,根据拐角坐标规划无人船自动测量的航线。
3.3 无人船按照规划航线自动航行测量
无人船按设定航线测量如图2所示。无人船自动航行工作模式如图3所示。
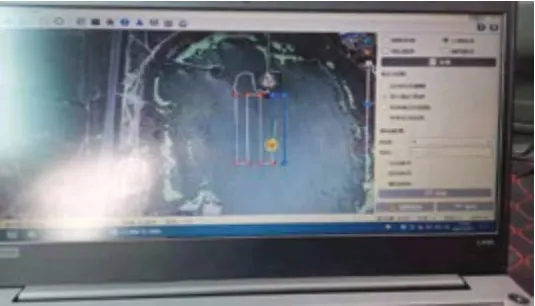
图2 无人船按设定航线测量

图3 无人船自动航行工作模式
3.4 数据传输及处理
将测量完的数据按照实际需求进行采样。采样前,将数据做平滑处理或者参考波形图文件做参考处理。最后根据项目需求,选择合适的采样间隔。经过后处理,测量成果可以导出为需要的格式。
3.5 成果检查校对
将无人船自动测量的数据与人工RTK测量的数据进行3个以上重合点比对,残差满足规范要求,方可使用(比对情况如表2所示)。

表2 数据比对情况表 单位:米
3.6 成果展示
将测量成果数据导入CAD软件中,查看采集点的空间分布情况(如图4所示)。
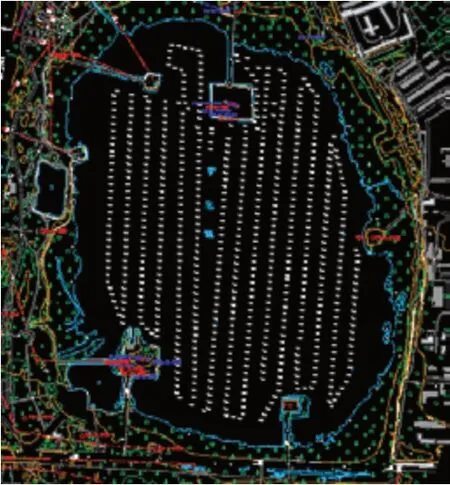
图4 采集点的空间分布情况
4 无人测量船发展方向概述
(1)新型华微3号无人测量船采用的是单波束测深系统,获得的点数据,构建的水下数字地面模型,不能全息的反应水下地形情况。随着无人船在测绘领域的广泛应用,多波束测深系统与无人船的有机集成,将彻底改变这一情况。(2)无人船环境感知主要包括3个方面:风、水浪、静态物体和动态物体的感知,静态和动态目标的感知则主要用于路径规划及自主避障。目前应用于上述环境感知的设备包括风速风向仪和ADCP、电子地图、雷达、可见光与红外设备等。每种设备具有特定的使用场合,仅凭一种传感器是无法满足水上复杂目标的探测需要,多传感器使用及信息融合已成为解决探测水上多样障碍物目标的一种有效途径。在用于避障的环境探测方面,可依据不同传感器的探测距离,使用分层避障模型,在远、中、近距离选择合适的传感器探测结果作为避障信息[2]。(3)针对于无人船无线通信的最根本挑战是无线电波的多径干扰。因为无人船天线高度一般不高,贴近水面,发射的无线电波通过水浪、船舶障碍物之间,其接收信号的强度,将由各直射波和反射波叠加合成。多路径效应会引起信号衰减。随着无人船的发展及在测绘领域的广泛应用,必要时需要远程实施多波束三维地形图像传输,对通信带宽提出更高要求。因此,在无人船的通信中重点解决高宽带传输以及超高频扩频通信信号的水上传输抗衰耗技术、抗多普勒频移技术和抗多种干扰技术问题。
5 结语
文章通过对某市泡泽治理工程中采用新型华微3号无人船水下地形测量的应用实例,经过实测数据对比分析,验证了水下地形测量可采用无人船快速获取水下地形数据,大大缩短了工期;解决了:(1)一些浅滩、滩涂无法到达的测量区域,实现了水域全覆盖测量;(2)有人船测量时,很难保证船体稳定,易产生晃动移位,导致测量精度降低和位置偏移;(3)某些复杂环境,对船和人有危险,安全性得不到保证;(4)有人船测量或人工测量,容易造成测量区域漏测、少测等情况。通过测量成果展示可以看出,无人船横向和航线的稳定性及抗干扰能力比较强,能够在较小风浪条件下保持平稳,同时对无人船需要改进的地方及未来发展方向作了阐述,具有一定的指导意义,实例的成功实施对其他相似水域水下地形测量的实施具有一定的参考价值。
猜你喜欢
环球时报(2022-08-15)2022-08-15
山东煤炭科技(2022年6期)2022-07-14
军事文摘(2021年22期)2022-01-18
矿产勘查(2021年3期)2021-07-20
军民两用技术与产品(2021年2期)2021-04-13
河北地质(2021年4期)2021-03-08
建材发展导向(2021年2期)2021-03-02
小哥白尼·趣味科学画报(2019年12期)2019-02-28
智富时代(2017年7期)2017-09-05
智富时代(2017年7期)2017-09-05