
海洋温差能供电水下滑翔机的液电转换过程建模与效率分析
2021-09-10 08:14王国晖杨亚楠王延辉王树新
水下无人系统学报 2021年4期
王国晖,杨亚楠,2*,王延辉,2,王树新,2
海洋温差能供电水下滑翔机的液电转换过程建模与效率分析
王国晖1,杨亚楠1,2*,王延辉1,2,王树新1,2
(1. 天津大学 机械工程学院,天津,300072; 2. 青岛海洋科学与技术国家试验室 海洋观测与探测联合试验室,山东 青岛,266237)
海洋温差能供电是提高水下滑翔机的续航里程和在位工作时长的有效技术手段。其能量传递路径的优化与能量转化效率提升对于保证水下滑翔机正常工作至关重要。基于水下滑翔机海洋温差能供电系统中机械能-电能转换过程的能量转换机理与损耗机理,建立了液压马达以及发电机等关键器件的参数化能量平衡方程、机械能-电能转换模型以及转换效率计算公式,开展了能量转换过程的效率分析。通过平台试验与模型求解结果对比可知,压力能-动能、动能-电能的能量转化效率的相对误差较小,分别仅为6.37%、5.12%。验证了模型的准确性。在此基础上,通过对模型的效率分析,对海洋温差能供电系统进行了优化设计与试制。在后续的海试试验中,试验样机可以收集6701 J的电能,压力能-电能转化过程的能量转化效率可达38.86%,验证了系统的有效性。
水下滑翔机; 海洋温差能; 液电转换; 转换效率
0 引言
人类目前对海洋的探索仅有5%左右,尚有95%的海洋尤其是深远海区域是未知的[1]。对海洋的科学认知程度取决于海洋观测装备的技术水平,提高海洋认知能力,走向深远海必须装备先行[2]。
水下滑翔机有别于采用螺旋桨推进的无人水下航行器,其通过改变自身浮力实现往复剖面的升沉运动,具有能耗水平低、效费比高、自持力强等优势,是开展大范围、长时序自主观测的重要工具[3-4]。当前,我国“走向深蓝”重大部署的实施对国产水下滑翔机的续航力与自持力提出了更高要求。而商用水下滑翔机一般依靠自身携带的电池获得能量补充,因携带的电池能量有限,其续航能力、自持力受到制约,无法满足未来深远海长期在位任务的需求。现有国产水下滑翔机的续航力、自持力水平与未来5~10年长期在位观测需求存在显著差距。
利用外界海洋环境能源是破解水下滑翔机长期能源供给问题、提升其续航力与自持力的潜在技术途径之一,对提高水下滑翔机的“能量自给”水平具有重要价值。自上世纪90年代起,基于固-液相变的海洋温差能利用技术开始被广泛采用[5]。水下滑翔机在往复穿越冷、热水层过程中利用固-液相变材料(phase change material,PCM)周期性热胀冷缩特性实现热能-液压能转化,液压能经蓄能器与液压马达-发电机组件(或外油囊),实现水下滑翔机温差发电(或温差浮力驱动)[6-7]。海洋温差能是海洋表层温水与深层冷水温度差之间存在的热能,具有稳定性强、昼夜波动小、不受气象与海况因素影响、只稍随季节性变化的特点[8],此外俘获海洋温差能的热交换过程与水下滑翔机剖面航行过程同步进行,因此该技术适于为采用往复剖面形式运动的水下滑翔机提供能量补给。
针对海洋温差能固-液相变、收集、转换的能量过程的研究不断深入: Kong等[9-10]基于焓法模型并采用液相分数场与温度场解耦的方法建立了相变传热数学模型,基于相变液相分数场分布提出了固-液相变体积变化量计算方法; 田振华等[11]建立了海洋温差能固-液相变液压转化系统的数学模型,对液压系统的初选部件开展了仿真计算,验证了设计方案的正确性; Wang等[12]基于热力学方法建立了温差能相变驱动循环过程数学模型,得出循环过程理论极限热效率; 此外,Wang等[13]还建立了温差相变发电过程的热-机械耦合模型,实现相变材料与液压机械系统的关联,研究了系统油压与输出效率、单位输出能量的关系,发现了蓄能器对提升系统性能有重要作用。
综上所述,海洋温差能利用过程是包含了热相变、热能-压力能、压力能-电能多个能量转换阶段,涉及众多器件及特征参数的复杂过程。由于海洋温差能固-液相变输出油液体积有限,导致发电时长短暂、发电扭矩小以及器件参数耦合等现象存在,而针对液压能-电能的液电转换过程研究尚未深入,对影响液电转换效率的关键因素也未有清晰认识。文中针对水下滑翔机海洋温差能供电系统的液电转换过程开展建模与效率分析,研究成果可为水下滑翔机温差能供电系统研制提供依据。
1 液电转换过程建模
海洋温差能供电系统组成及工作原理如图1所示,其组成主要包括: 1-相变材料; 2-换热管; 3-电磁阀; 4-蓄能器; 5-发电机; 6-液压马达; 7-蓄电池; 8-皮囊(油液充满为膨胀状态,如图1(a),(d)所示; 无液压油时为收缩状态,如图1(b),(c)所示)。
初始状态如图1(a)所示,温差能供电系统漂浮在海面上,皮囊内保持有最大油量。当滑翔机下潜至深海时,由于海水温度较低,换热管内的相变材料凝固收缩,皮囊内液压油逐渐流向换热管,如图1(b)所示。而后,随着供电系统上浮至海洋表面,由于海水温度较高,换热管内的相变材料融化膨胀,并将换热管内的液压油注入蓄能器中进行存储。在这个过程中,蓄能器的压力不断上升,当蓄能器的压力达到其设定的最大压力时,电磁阀开启,蓄能器中的液压油经液压马达流入皮囊之中。与此同时,液压马达在液压油的作用下带动发电机旋转进而产生电能,并经整流电路存储于蓄电池中,如图1(c)和图1(d)所示。
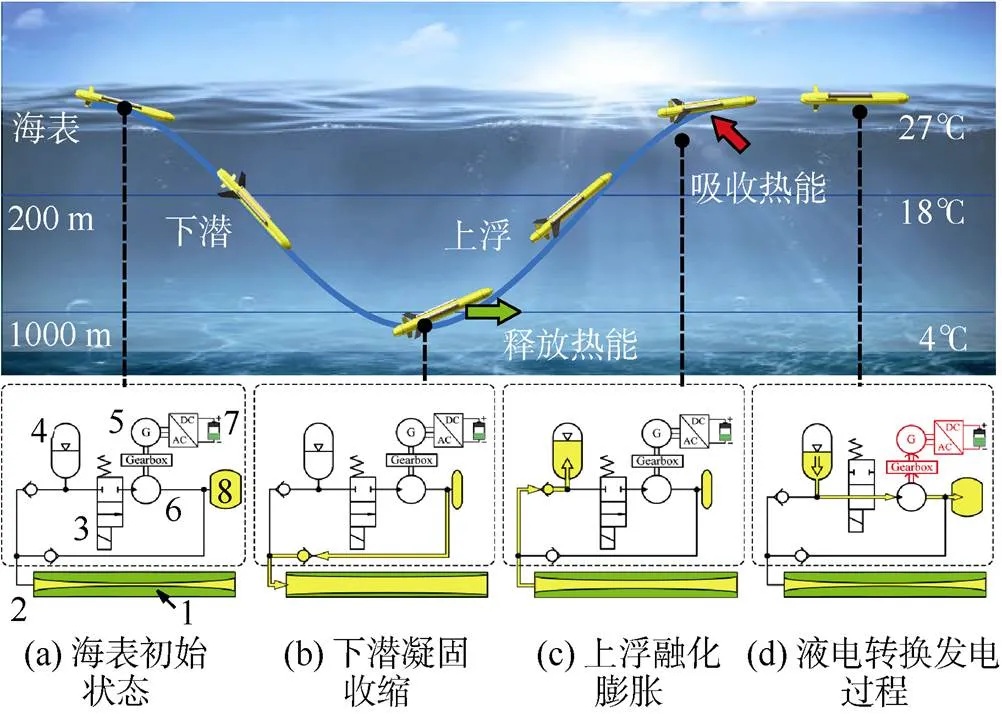
图1 海洋温差能供电水下滑翔机工作原理
由上述海洋温差能供电系统工作过程分析可知,液电转换过程涉及了压力能(初始蓄能器内存储)—动能(液压马达)—动能(变速器)—动能(发电机)—电能(发电机输出)多个步骤,其中液压马达、发电机完成了能量形式的转变,在能量形式转变过程中既获得有用能量,同时伴随着多种形式的能量损耗与流失。文中基于液压马达以及发电机的工作原理,研究能量转换与损耗机理,揭示出不同形式能量间实现转换的机制。
1.1 液压马达效率模型
液压马达作为将压力能转化为机械动能的核心组件,其性能的好坏直接影响着海洋温差能供电系统的能量转化效率。能量转化效率可以分为容积效率和机械效率,容积效率为
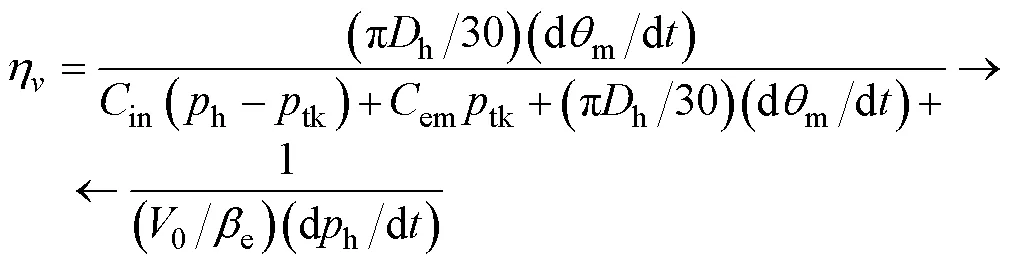
式中:h为液压马达的排量;m为液压马达的转动角度;in为内泄露系数;em为外泄露系数;h为液压马达的进油口压强;tk为液压马达的泄油口压强;e为有效体积弹性模量;0为蓄能器充气压力时对应的气囊体积。
由式(1)可知,在马达结构参数确定的条件下,液压马达容积效率与工作压力、液压马达转速以及弹性模量等有关。
由液压马达和负载之间的力矩平衡方程可以推出液压马达的机械效率

式中:t为液压马达和负载折算到液压马达轴上的总惯量;m为黏性阻尼系数;为弹性阻尼系数; 由式(2)可以看出,液压马达机械损耗主要与液压马达两端压差、液压马达转速相关。
根据式(1)和式(2)可知液压马达的效率

1.2 发电机效率模型
发电机是将机械动能转化为可存储电能的核心组件。永磁无刷直流发电机因其功率密度大、体积小、效率高等优点,广泛应用于风力发电系统、能量回收系统等。发电机的效率为
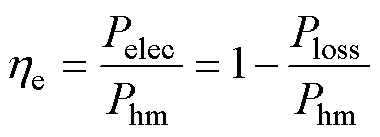
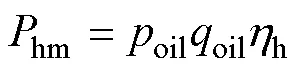
式中,hm为发电机输入的机械功率,也为液压马达的输出功率。根据液压马达液压功率的定义可知,液压马达的输出功率为
发电机运转过程中的损耗主要包括铜损、铁损、磁滞损耗以及杂散损耗4部分。其中,铜损和铁损是电机运转过程中的主要损耗,约占总体损耗的80%左右。一般情况下,采用等效电路的方式对电机效率进行分析[15]。其在0坐标系下的发电机等效电路如图2所示。
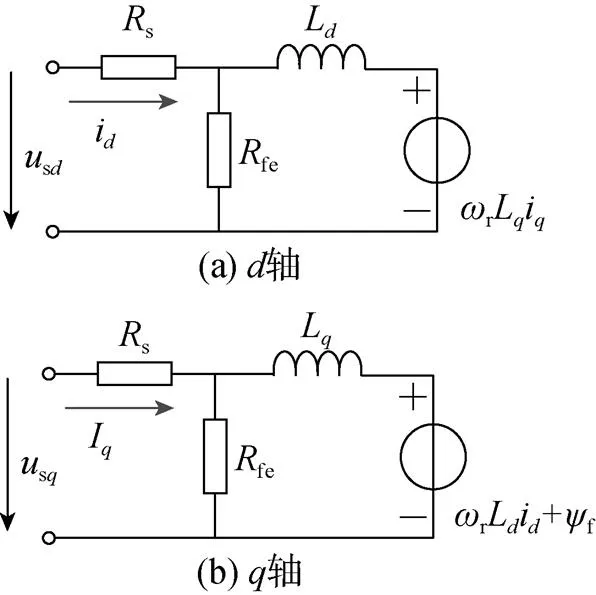
图2 发电机等效电路模型
对上述等效电路进行分析,可以得到发电机的铜损cu和铁损fe分别为
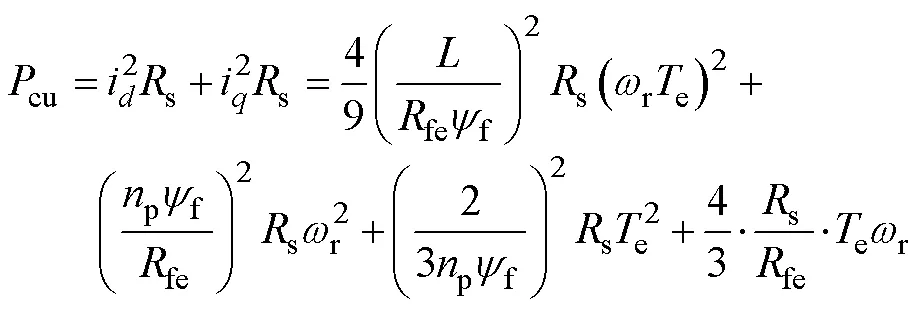
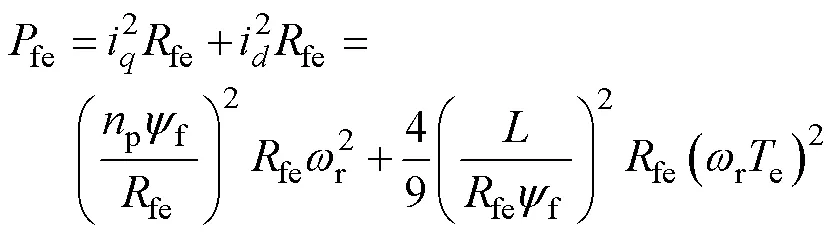
式中:为轴电流;为轴电流;L为轴电感;L为轴电感;fe为发电机的等效铁阻;s为发电机的等效内阻;f为基波磁链;r为转子机械角速度;e为发电机的电磁力矩;p为发电机的极对数。
故总损耗
将式(5)~式(8)代入式(4),则可得发电机的效率模型
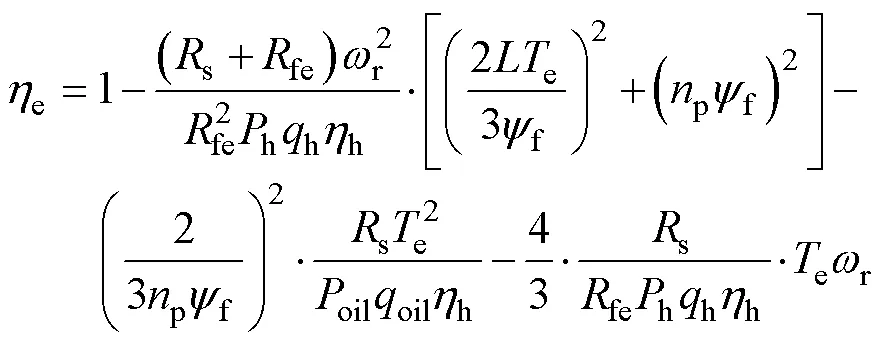
利用式(3)和式(9)系统的液电转化效率
2 模型验证与液电转换过程效率分析
2.1 模型验证
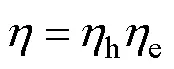
文中采用海洋温差能供电系统室内测试装置开展液电转换过程模型与效率计算公式的验证。如图3和图4所示,室内测试装置包括换热单元、液压单元、传动单元、储电单元和数据采集器,其中换热单元由冷热交换机、恒温水槽、温度传感器及固-液相变换热器组成; 液压单元由单向阀、蓄能器、压力传感器、电磁阀、可调节流阀、液压马达、调压阀、液位传感器、油箱及各液压器件之间的液压管组成; 传动单元由联轴器、速度传感器、扭矩传感器、减速器及发电机组成; 储电单元由整流桥模块、蓄电池、电流传感器及电压传感器组成。相关元器件参数如表1所示。
在试验中,分别由压力传感器记录蓄能器压力值h; 电流传感器记录充电电流charge; 电压传感器记录充电电压charge; 红外线速度传感器记录发电机轴转速h; 扭矩传感器记录液压马达输出轴扭矩h; 油箱的液位传感器记录液压油外泄量out。此外,液压油内泄量leak由液压马达旁通口的试管记录,发电时长由数据采集器生成。
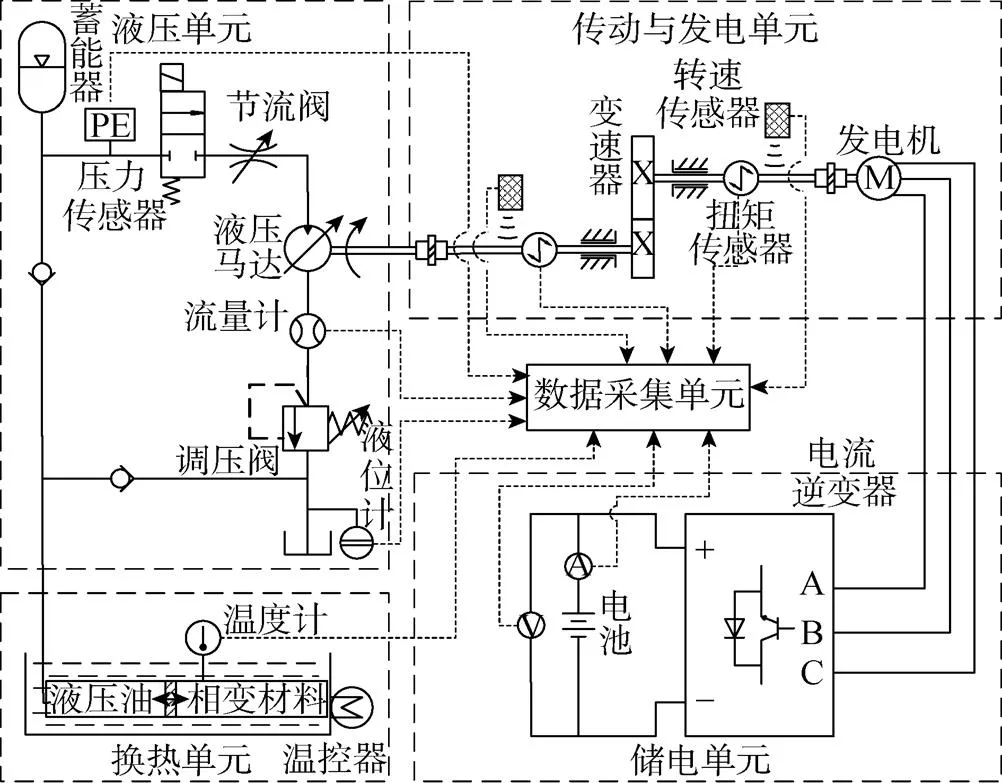
图3 海洋温差能供电系统室内模拟测试装置构成示意图
图4 海洋温差能供电系统室内模拟测试装置
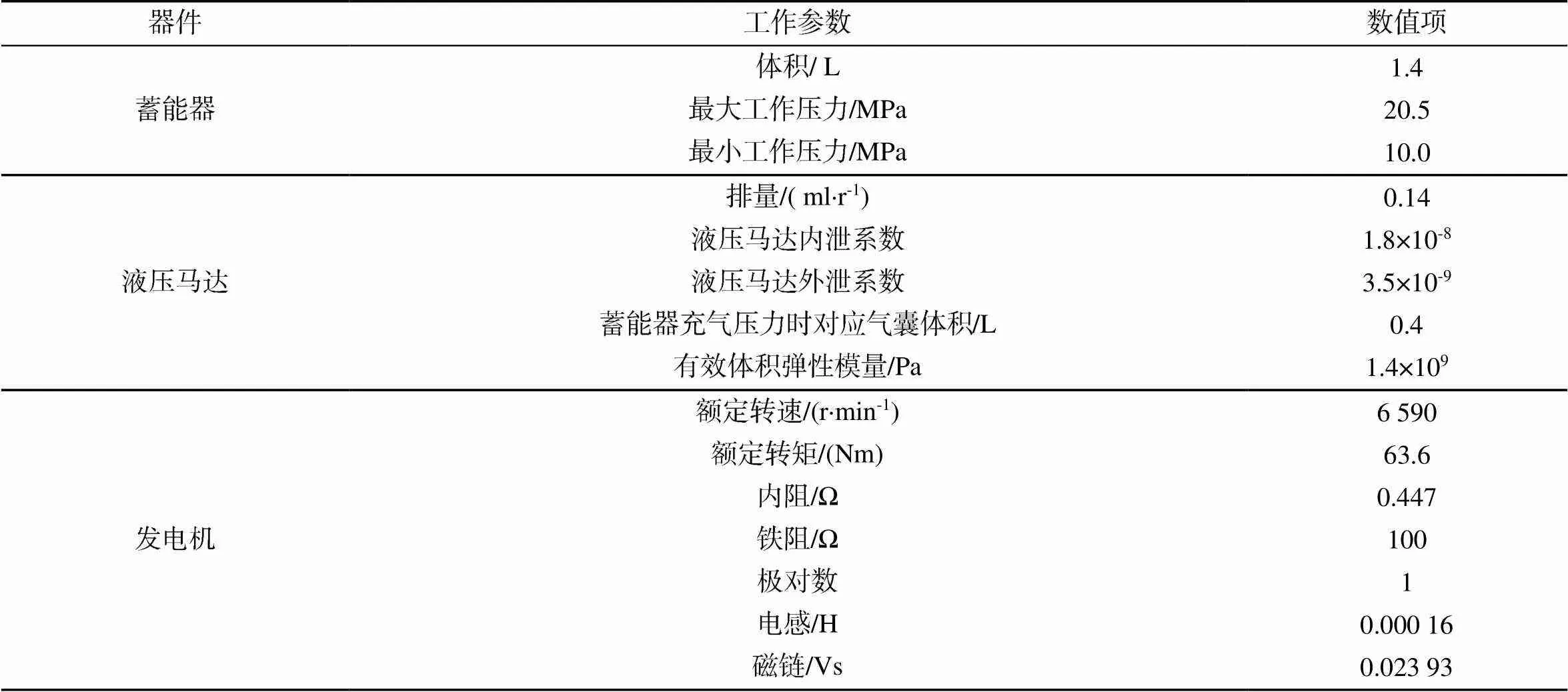
表1 相关元器件参数列表
为与温差能-电能转化效率模型的计算结果进行对比,对试验测试平台各能量转化过程中的试验效率及全过程能量转化效率定义如下

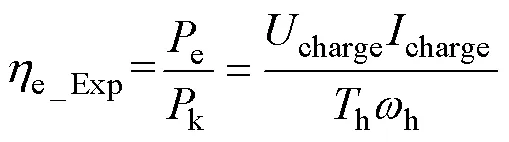
式中:h_Exp为试验测定的液压马达效率;e_Exp为试验测定的发电机效率;k为液压马达输出的机械功率;h为输入液压马达的液压功率;e为发电机的输出电功率。
为了验证液压系统模型的准确性,选取了10个工作点对液压马达的总效率进行了试验测定和仿真分析,结果如图5所示。其中代表了仿真值与实验值的相对误差。测定点的压力和转速值如表2所示。由图可知,仿真值和试验测定值之间的吻合度较高,相对误差较小,平均误差仅为6.37%,证明了液压马达效率模型的准确性。
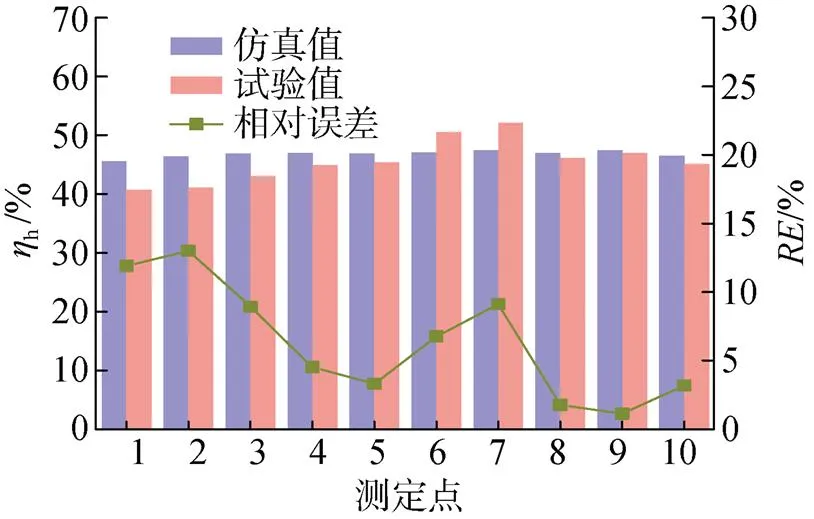
图5 不同测定点液压马达效率值的仿真值、试验测定值及相对误差

表2 液压马达效率测定点
图6是随机选取10个工作点的情况下,发电机的能量转化效率试验测定值和仿真值。测定点的发电机扭矩和转速值如表3所示。由图可知,仿真值和试验测定值间的吻合度较高,相对误差较小,平均误差仅为5.12%。展示了试验数据与仿真结果良好的一致性,验证了模型的准确性。
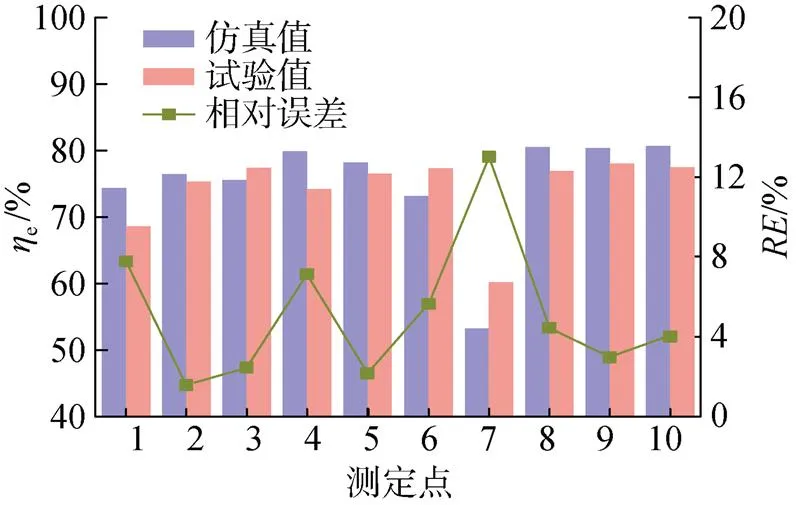
图6 不同测定点发电机效率值的仿真值、试验测定值及相对误差

表3 发电机效率测定点
2.2 液电转换过程效率分析
针对文中选用的液压马达,通过对其工作效率、工作压力及转速进行分析得到最佳的工作区间。由式(1)~式(9)可得选定的液压马达的容积效率、机械效率随压力及转速的变化情况分别如图7(a)与图7(b)所示。
由图7(a)可知,液压马达的容积效率随着压力的升高而降低,这是由于随着压力的升高,液压马达高低压两侧的压差增大,使其内漏量增加; 相同压力条件下,容积效率随着转速的升高而升高,这是由于转速高意味着理论流量大,而泄漏量和转速无关。由图7(b)可知,液压马达的机械效率随压力的升高呈上升趋势,这是由于随着压力的增大,根据式(2)可知,液压马达高低压两侧的压差增大,液压功率增大,但是其在转速不变的前提下机械能量损耗基本不变,从而造成机械效率随之增大。在相同压力条件下,机械效率随着转速的升高而降低。
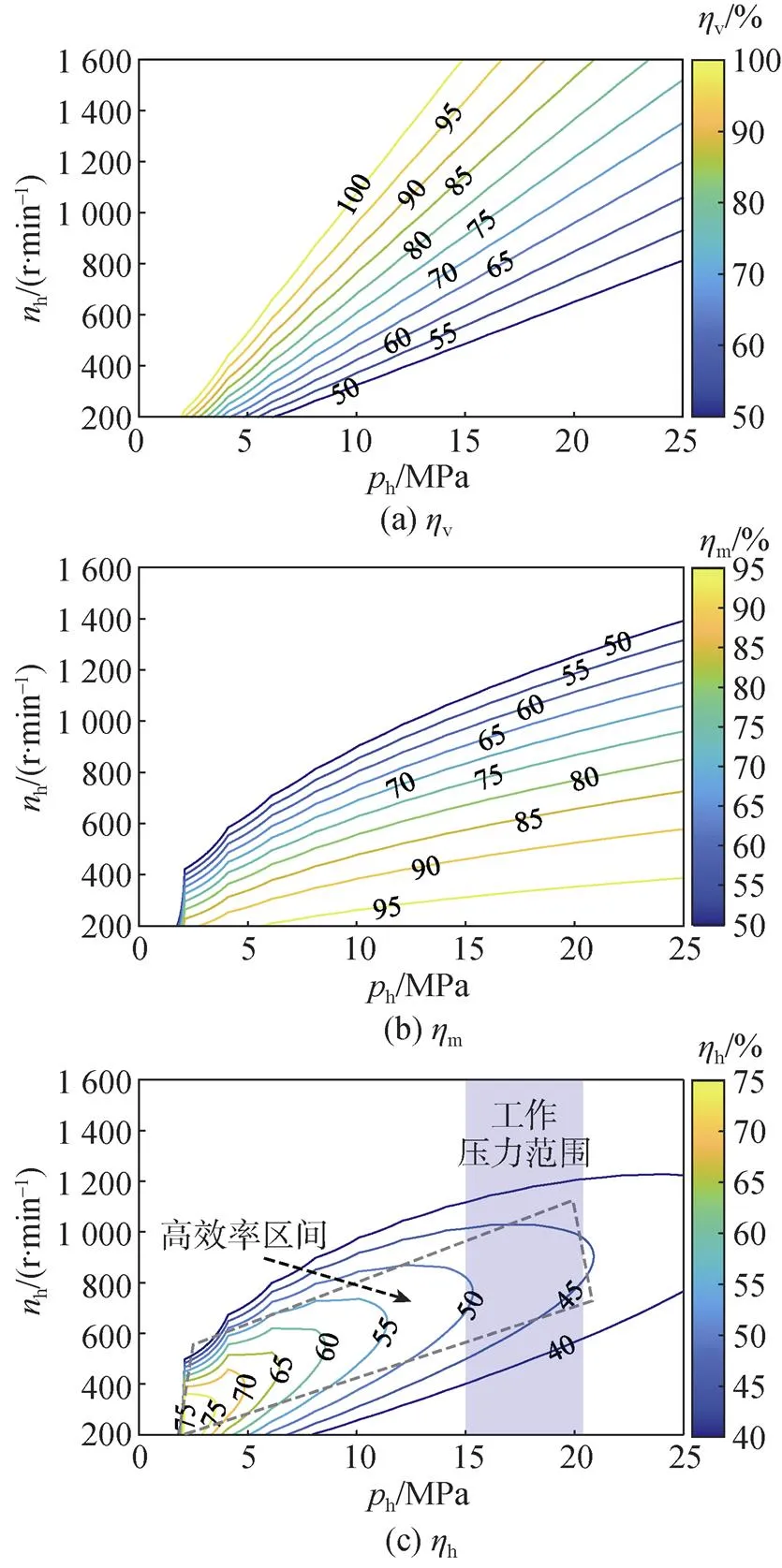
图7 液压马达效率随压力和转速变化曲线图
由式(4)可得液压马达的效率与工作压力、转速之间的关系,如图7(c)所示。由图可知,当液压马达处于低速、小扭矩情况下时,该液压马达可以处于较高的效率工作区间。但是,为了保证能量存储量,设计的系统压力h范围在15~21 MPa之间。在此区间内,该液压马达转速h在800~ 1 000 r/min之间,液压马达的能量转化效率相对较高,最大效率hmax为50%。根据液压马达输出的机械功率的定义,液压马达的输出功率

式中:h为液压马达排量,由表1得h=0.14 mL/r;h为液压马达的转速,其与液压马达转动的角度m之间的关系为

发电机的输入功率受限于液压马达的输出功率。当液压马达工作在文中设置的最优工作状态时,根据式(13)以及对图7的分析可知,液压马达输出的最大机械功率为25 W。因此,发电机仅可能在如图8中的紫色区域内工作(≤25 W)。此外,当发电机在如图8中紫色区域和高效率区间的交汇区域内工作时,发电机的效率较高。此时,对应的发电机转速为5000 ~7000 r/min。

图8 发电机效率随扭矩和转速变化情况.
分析可知,液压马达和发电机的最优工作转速存在差异。为了使液压马达和发电机均可在其各自最优的转速区间内工作,采用了1个增速机构将液压马达的输出转速(800~1000 r/min)增至发电机的理想工作转速(5000 ~7 000 r/min),增速比为6∶1。
3 海域试验
3.1 试验条件
在上述分析的基础上,研制了面向水下滑翔机的温差能供电装置。2018年6月,在中国南海海域对系统进行发电性能测试。在试验中,首先将该温差能供电系统放置于1000 m水深3 h,该深度水温约为4℃; 而后样机浮至海洋表面,并在水面停留3 h。表层海水的温度约为30℃。样机如图9(a)所示,海试现场如图9(b)所示。
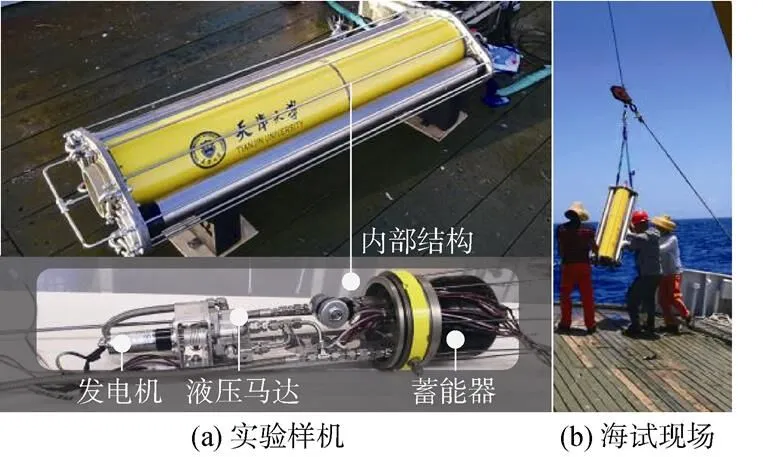
图9 海洋温差能供电系统原型样机及海试现场照片
3.2 试验结果
试验过程中的下潜深度dive及蓄能器压力h随时间的变化情况如图10所示。当样机漂浮至海洋表面时,蓄能器入口的压力快速升至预充压力16.5 MPa,在经过30 min之后达到设定的压力上限20.5 MPa。而后电磁阀开启,蓄能器中液压油带动液压马达,发电机转动进而为电池充电。当蓄能器入口压力降低至16.5 MPa时,电磁阀关闭,至此完成了第1个发电循环。在1次剖面运动中,该样机可完成4次上述循环。
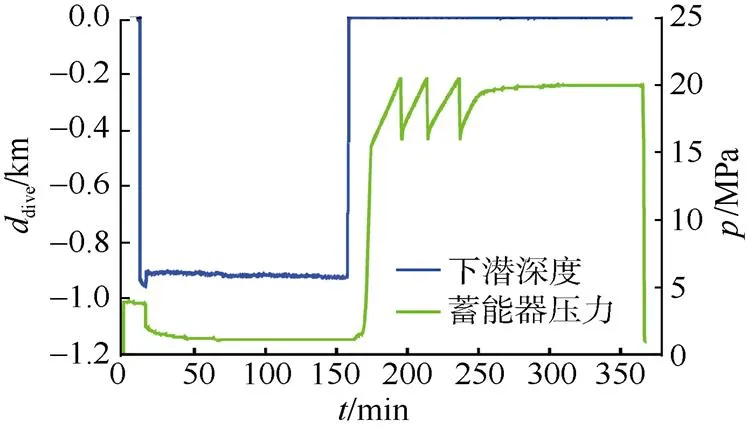
图10 海试中样机下潜深度和蓄能器压力随时间变化曲线
考虑到蓄能阶段并非文中研究重点,因而在后续的讨论中仅对发电阶段进行讨论。图11为海试中发电阶段电池的充电功率与电池存储电量。由图可知,在4个发电循环中,发电机最大输出功率可达30 W,平均功率25 W,1个潜水剖面的累积发电时长为300 s,累积发电量可达6701 kJ。
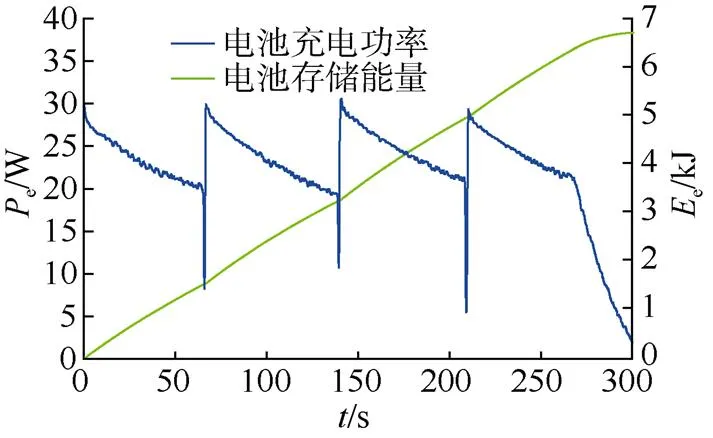
图11 海试中电池充电功率和存储能量曲线
为了便于计算样机的电液转化效率,对液电转换试验效率定义如下
式中:e为电池存储能量;ha为蓄能器输出的压力能,且
根据图12的蓄能器输出压力和流量曲线,利用式(16)可得样机所收集压力能ha=17244 J,而电池存储电能e=6 701J,利用式(15)得样机在海试中液电转化过程的能量转化效率为38.86%。

图12 海试中发电时蓄能器出口端压力和流量曲线
由图13可知,利用模型估算的液压马达能量转化效率h为49%~45%,平均能量转化效率为47%。由图14可知,利用模型估算的发电机的能量转化效率e为77%~75%; 平均能量转化效率为76%; 利用式(10)可得通过模型估算的样机液电转化系统能量转化效率为35.72%。能量转化效率与试验结果基本一致。
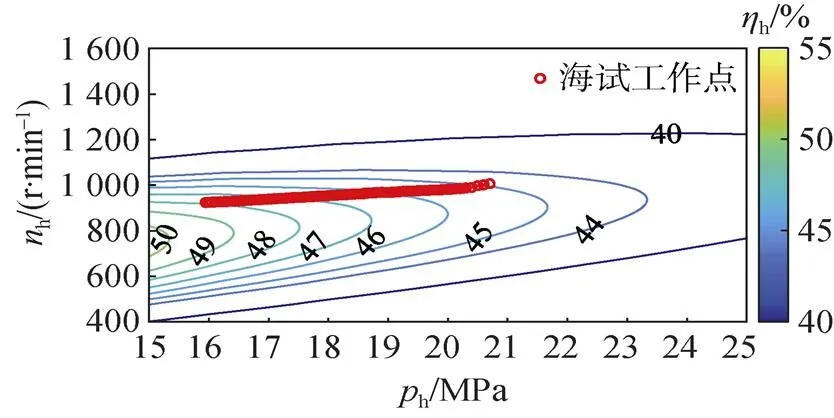
图13 海试中样机工作点对应的液压马达总效率仿真值
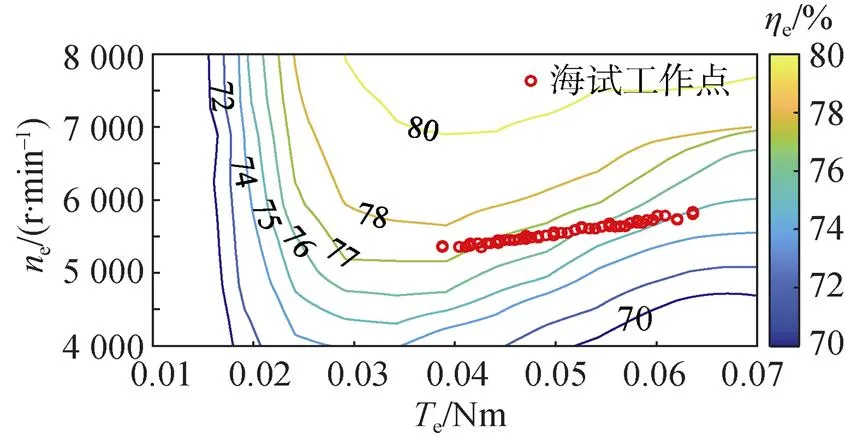
图14 海试中样机工作点对应的发电机效率仿真值
4 结束语
文中基于水下滑翔机海洋温差能供电系统中液压能-电能转换过程的能量转换机理与损耗机理,建立了关键器件的参数化能量平衡方程以及液电转换效率计算公式,开展了液电转换过程的效率分析计算。通过室内模拟测试与海试验证了理论模型的正确性与样机的有效性。得到如下结论。1) 通过室内测试装置验证了理论模型可准确对液电转换效率进行预测。压力能-动能、动能-电能的能量转化效率试验值和仿真值之间的相对误差分别为6.37%,5.12%。2) 当液压马达的工作条件处于低速小扭矩状态时,其能量转化效率较高; 发电机处于高速大扭矩状态时,其能量转化效率较高。3) 海试结果表明,在一个工作剖面内海洋温差能供电系统可累计发电6701J,平均液电能量转化效率可达38.85%,满足水下航行器的能量需求,验证了样机的有效性。
文中结论可为水下滑翔机温差能供电系统的优化设计与商业化选型提供参考。下一步的工作将对能量传递过程可控参数进行最优控制,以延长系统在高效率工作区间的工作时间。
[1] 唐国建,崔凤. 海洋开发对中国未来发展的战略意义初探[J]. 上海行政学院学报,2013,14(5): 56-61.
Tang Guo-jian,Cui Feng. The Strategic Significance of Marine Development for Chinese Future Development[J]. The Journal of Shanghai Administration Institute,2013,14(5): 56-61.
[2] 李乃胜. 聚焦海洋装备国产化,为建设海洋强国提供强有力的工具性支撑[N]. 中国科学报,2017-8-9.
[3] 俞建成,孙朝阳,张艾群. 海洋机器人环境能源收集利用技术现状[J]. 机器人,2018,40(1): 89-101.
Yu Jian-cheng,Sun Chao-yang,Zhang Ai-qun. The Present Status of Environmental Energy Harvesting and Utilization Technology of Marine Robots[J]. Robot,2017,40(1): 89-101.
[4] 沈新蕊,王延辉,杨绍琼,等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报,2018,26(2): 89-106.
Shen Xin-lei,Wang Yan-hui,Yang Shao-qiong,et al. Development of Underwater Gliders: An Overview and Prospect[J]. Journal of Unmanned Undersea Systems,2018,26(2): 89-106.
[5] Webb D,Simonetti P,Jones C. SLOCUM: An Underwater Glider Propelled by Environmental Energy[J]. IEEE Journal of Oceanic Engineering,2001,26(4): 447-452.
[6] Yang Y,Wang Y,Ma Z,et al. A Thermal Engine for Underwater Glider Driven by Ocean Thermal Energy[J]. Applied Thermal Engineering,2016,99: 455-464.
[7] Ma Z,Wang Y,Wang S,et al. Ocean Thermal Energy Harvesting with Phase Change Material for Underwater Glider[J]. Applied Energy,2016,178(15): 557-566.
[8] Wang M,Jing R,Zhang H,et al. An Innovative Organic Rankine Cycle(ORC) Based Ocean Thermal Energy Conversion(OTEC) System with Performance Simulation and Multi-objective Optimization[J]. Applied Thermal Engineering,2018,145: 743-754.
[9] Kong Q,Ma J,Che C. Numerical Simulation and Experimental Study of Volumetric Change Rate During Phase Change Process[J]. International Journal of Energy Research,2009,33(5): 513-525.
[10] Kong Q,Ma J,Xia D. Numerical Simulation and OptimiZation of Underwater Glider Operating Process[J]. Rene- wable Energy,2010,35: 771-779.
[11] 田振华,周友援,柳军飞. 海洋温差能发电自升降平台系统建模与仿真[J]. 四川兵工学报,2014,35(1): 31-33,52.
Tian Zhen-hua,Zhou You-yuan,Liu Jun-fei. Modeling and Simulating of Thermal Recharging(TREC) and Power Unit[J]. Journal of Sichuan Ordnance,2014,35(1): 31-33,52.
[12] Wang G,Ha D,Wang K. Harvesting Environmental Thermal Energy Using Solid/liquid Phase Change Materials[J]. Journal of Intelligent Material Systems and Structures,2018,29(8): 1632-1648.
[13] Wang G,Ha D,Wang K. A Scalable Environmental Thermal Energy Harvester Based on Solid/liquid Phase-change Materials[J]. Applied Energy,2019,250: 1468-1480.
[14] 桑勇,邵利来,赵健龙,等. 基于 AMESim 蓄能器组的动态特性研究[J]. 液压气动与密封,2018,38(1): 20-24.
Sang Yong,Shao Li-lai,Zhao Jian-long,et al. Study on Multiple Accumulator in Hydraulic System Based on AMESim[J]. Hydraulics Pneumatics and Seals,2018,38 (1): 20-24.
[15] 林添良.工程机械节能技术及应用[M].北京: 机械工业出版社,2017: 101-105.
Modeling and Efficiency Analysis of the Hydro-electric Conversion Process of Underwater Glider Powered by Ocean Thermal Energy
1,1,2*,1,2,1,2
(1. School of Mechanical Engineering,Tianjin University,Tianjin 300350,China; 2. The Joint Laboratory of Ocean Observing and Detection,Qingdao National Laboratory for Marine Science and Technology,Qingdao 266237,China)
Ocean thermal energy power supply is an effective technique to increase the duration and range of underwater gliders. The optimization of the energy transfer path and improvement of the energy conversion efficiency are crucial for improving the operation of underwater gliders. Based on the energy conversion mechanism and loss mechanism of the mechanical energy-electric energy conversion process in the ocean thermal energy power supply system of underwater gliders,this study establishes the parametric energy balance equation,mechanical energy-electric energy conversion model,and conversion efficiency calculation equation of the hydraulic motor and generator and other key devices as well as performs an efficiency analysis of the energy conversion process. The relative error in the conversion efficiency of pressure-kinetic energy and kinetic-electric energy conversions,when comparing the results of the platform test and the model simulation,are 6.37% and 5.12%,respectively. The accuracy of the model is therefore verified,as these relative errors are small. As a result,the optimal design and prototyping of the ocean thermal energy power supply are performed. In the sea trial,the test prototype can harvest 6 701 J of electrical energy,and the energy conversion efficiency of the pressure-electric energy conversion process can reach 38.86%,validating the accuracy and effectiveness of the proposed model.
underwater glider; ocean thermal energy; hydro-electric conversion; conversion efficiency
TJ630; TP242
A
2096-3920(2021)04-0451-08
10.11993/j.issn.2096-3920.2021.04.012
王国晖,杨亚楠,王延辉,等. 海洋温差能供电水下滑翔机的液电转换过程建模与效率分析[J]. 水下无人系统学报,2021,29(4): 451-458.
2020-07-28;
2020-11-11.
国家自然科学基金(52006155).
通信作者简介:杨亚楠(1988-),男,博士,讲师,主要研究方向为环境能源水下航行器研制及其应用.
(责任编辑: 杨力军)
猜你喜欢
东坡赤壁诗词(2022年1期)2022-02-25
小资CHIC!ELEGANCE(2021年40期)2021-11-08
少儿科技(2021年2期)2021-05-17
作文周刊·小学三年级版(2020年24期)2020-07-17
知识就是力量(2019年7期)2019-07-01
儿童故事画报·发现号趣味百科(2019年4期)2019-05-10
棋艺(2016年4期)2016-09-20
课堂内外(小学版)(2016年3期)2016-04-05
当代(2009年3期)2009-05-25
航空知识(1958年10期)1958-01-19
