
基于表征驾驶风格的驾驶员纵向加速度模型
2021-09-10 05:23:58王雪莹张译芳袁盛玥马世峰WangXueyingZhangYifangYuanShengyueMaShifeng
北京汽车 2021年4期
王雪莹,张译芳,袁盛玥,马世峰Wang Xueying ,Zhang Yifang,Yuan Shengyue,Ma Shifeng
基于表征驾驶风格的驾驶员纵向加速度模型
王雪莹1,张译芳1,袁盛玥1,马世峰2
Wang Xueying1,Zhang Yifang1,Yuan Shengyue1,Ma Shifeng2
(1. 北京新能源汽车股份有限公司,北京 100176;2. 长春孔辉汽车科技股份有限公司,吉林 长春 130012)
驾驶员驾驶风格的差异会引起纵向加速度决策与最优值存在一定程度的偏差。改进了基于最优预瞄的驾驶员纵向加速度模型,以跟随速度为参考量,提出了多点多目标的二阶预瞄决策模型,并以预瞄视野、决策意愿和决策偏差表征驾驶员的驾驶风格进行建模。通过Simulink-Carsim联合仿真,验证模型可以反映出不同驾驶风格下的驾驶行为,为研究分析真实驾驶行为提供借鉴。
车辆工程;驾驶员模型;驾驶风格;二阶预瞄
0 引 言
在人—车—路闭环系统中,驾驶员兼做道路状况的感知环节和车辆操作的决策环节,感知处理着各种信息,对车辆安全稳定行驶以及乘坐人员的感受起着重要作用[1]。驾驶员模型是真实驾驶员操纵能力的数学表达,是随着驾驶员监控、管理、协调、补偿等行为的重要性不断增强以及控制理论的不断发展而逐渐发展起来的新技术[2]。
驾驶员模型最初广泛应用于车辆操纵稳定性评价,包括双移线仿真、转向轻便性双移线仿真等。随着硬件在环技术应用的发展,越来越多的车辆开发及零部件控制器硬件开发开始应用驾驶员模型进行车辆动力学及行驶仿真[3-6],以此验证控制器的可靠性及其他性能。智能驾驶技术的发展扩大了驾驶员模型的应用范围,在主动安全控制系统设计领域有了新的应用[7-9]。同时,驾驶员模型也被应用于智能车控制系统开发[10-11],可以跟随目标轨迹和目标速度,决策出相应的转向盘转角和加速踏板、制动踏板开度。
硬件在环、控制器在环技术中,不同驾驶员驾驶同一辆车时,车辆响应有所不同,因此以驾驶风格细分的驾驶员模型能够更全面地测试控制器及车辆特性。以基于最优预瞄的驾驶员纵向加速度模型为基础,以跟随速度为参考量,发展得到基于多点多目标的决策模型,同时基于纵向加速度及纵向加速变化率进行2阶预瞄决策,并以预瞄视野、决策意愿和决策偏差表征驾驶员的驾驶风格进行建模。通过Simulink-Carsim联合仿真,验证模型可以反映出不同驾驶风格下的驾驶行为,丰富了驾驶员纵向加速度模型对不同驾驶风格的模拟。
1 表征预瞄视野的多点预瞄决策建模
纵向驾驶员模型的多点预瞄类似于侧向驾驶员模型,由预期轨迹预瞄区间内各点的速度进行加速度决策,如图1所示,图中-为大地坐标系,-为车辆坐标系。
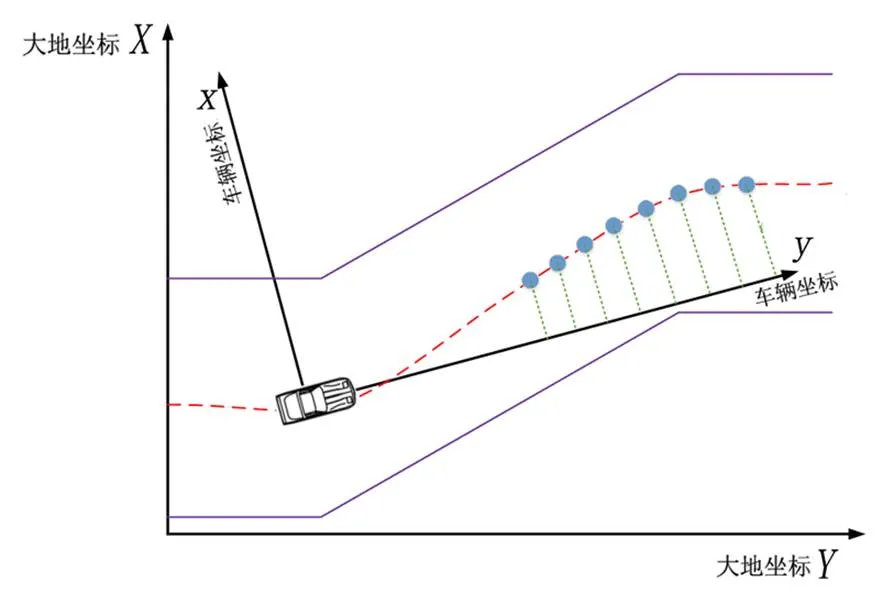
图1 多点预瞄示意图
在单点预瞄下,根据最优预瞄理论,车速跟随误差e为
e=(+)-(+) (1)
式中:为预瞄时刻;为到达预瞄点所需时间;(+)为轨迹上预瞄点处的目标车速,表示驾驶员驾驶车辆到达预瞄点处时希望的目标车速;(+)为驾驶员驾驶车辆到达预瞄点处时实际的行驶车速。根据单点预瞄最优理论得到
e=(+)-(+)=0 (2)
假设车辆在很短的距离内以匀加速运动行驶,可得
(+)=()+a×(3)
由式(2)与式(3)可得
e=(+)-()- a×=0 (4)
当驾驶员的预瞄视野中有个预瞄点时,得到
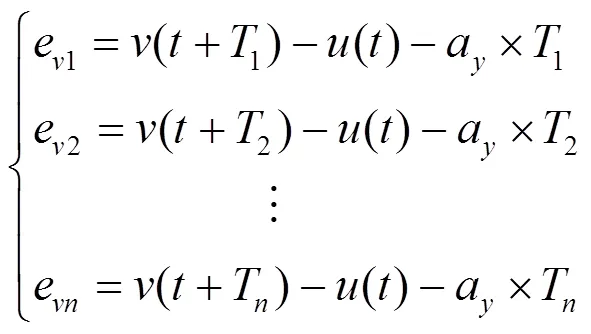
式中:(+T)为每一预瞄点处的目标车速;T为每一预瞄点对应的预瞄时间;a为纵向加速度。
合并每一点的最优预瞄目标,构建多点最优预瞄指标函数为

即

式中:ω为每一预瞄点处速度跟随误差的权重系数。为了体现不同预瞄点处权重的不同,定义权重系数ω(T)。驾驶员根据预瞄视野进行决策时,以近处预瞄点为主要决策依据,如图2所示,则
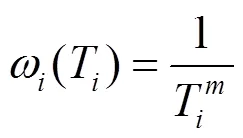
式中:为权重程度系数,值越大,权重程度越高,且相邻两个预瞄点之间的权重差距越大。
驾驶员根据预瞄视野进行决策时,以远处预瞄点为主要决策依据,如图3所示,则
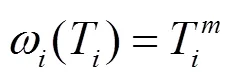
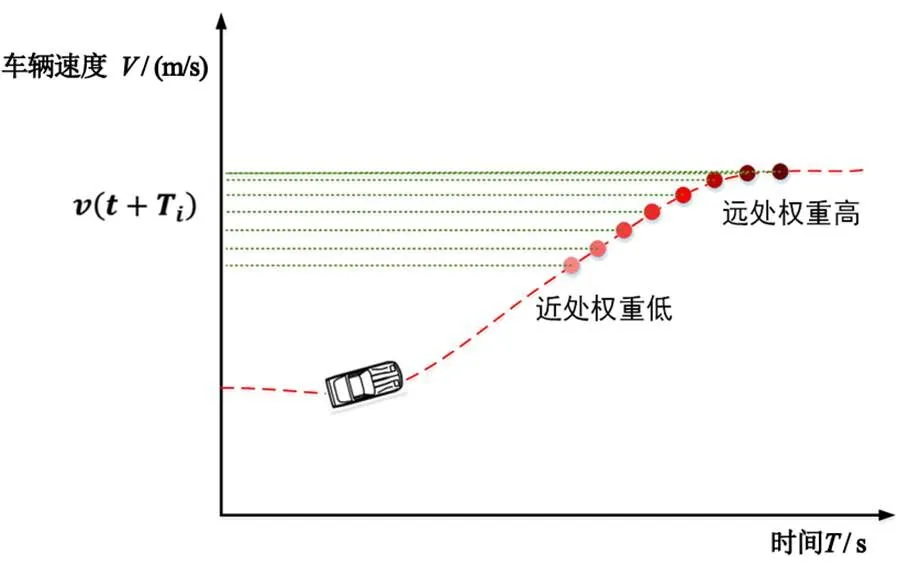
图3 纵向预瞄窗-远窗示意图
驾驶员根据预瞄视野进行决策时,对每个预瞄点一视同仁,如图4所示,则
2 表征决策意愿的多目标决策建模
在智能车中,如果乘客希望以较平缓的加速度方式行驶,可以牺牲一些速度跟随精度,这是一个跟随精度和乘坐舒适性之间的选择。据此,建立双目标决策纵向模型。
目标1:最小速度跟随误差,强调跟随准确性,则

目标2:最小纵向加速度,强调乘坐舒适性,则

由于J1与J2两个指标的数量级、量纲均不同,需要进行无量纲化与归一化,得到


3 表征决策偏差的纵向模型
纵向加速度最优预瞄理论,即预瞄点处车速与车辆行驶速度误差为0,进行纵向加速度决策。实际决策过程中并不能保证每次决策都得到由式(4)计算所得的准确值,而是在最优纵向加速度附近决策出接近最优值的实际纵向加速度;因此,最优纵向加速度和实际纵向加速度会产生决策偏差



4 基于2阶多点预瞄的纵向模型
在速度跟随中,驾驶员为了驾驶车辆到达预瞄位置,决策出最优纵向加速度,车辆匀加速运动,在到达预瞄点时达到目标车速;对于某些驾驶员,决策行为不只限于纵向加速度,还包括纵向加速度变化率,以此进行车辆操控。
2阶预瞄最优指标为

式中:为驾驶员2阶预瞄的程度,为了使模型具有一般性,则0≤≤1,当=0时模型退化为1阶预瞄模型。
5 仿真结果与分析
利用MATLAB软件,通过Simulink-Carsim建立联合仿真平台,主要从预瞄视野、决策意愿和决策偏差、2阶预瞄程度进行验证。
(1)预瞄视野的仿真分析。
针对预瞄视野,主要从预瞄窗口权重、预瞄区间大小和预瞄点个数3个方面进行仿真。
对于预瞄窗口权重的影响,不同权重下速度跟随曲线的对比结果如图5所示。
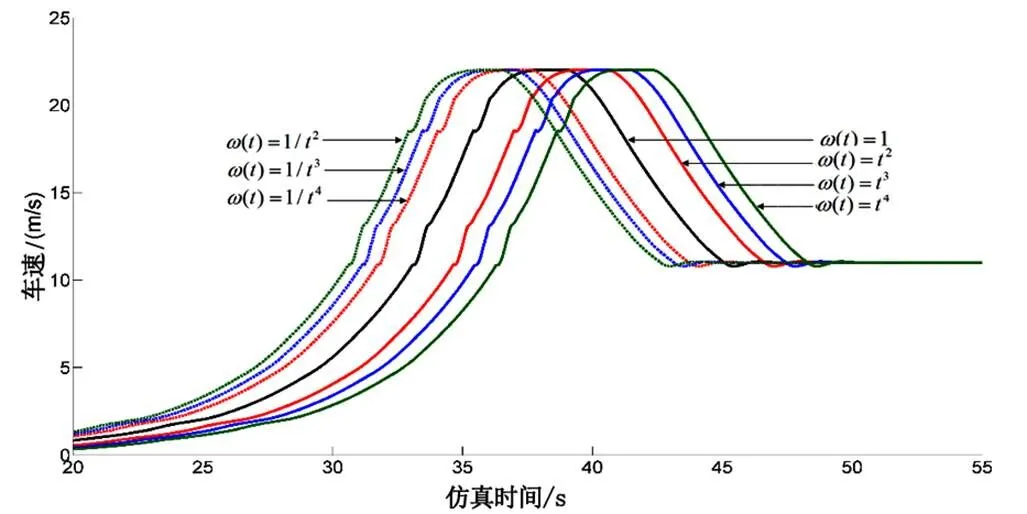
图5 不同权重下速度跟随曲线的对比图
从图5可以看出,远处权重高的跟随方式车辆纵向加速度较小,近处权重高的跟随方式纵向加速度较大,并且系数越大,这种趋势越明显。
对于预瞄区间大小的影响,不同预瞄区间下车速跟随与加速踏板、制动踏板输出曲线结果如图6所示。
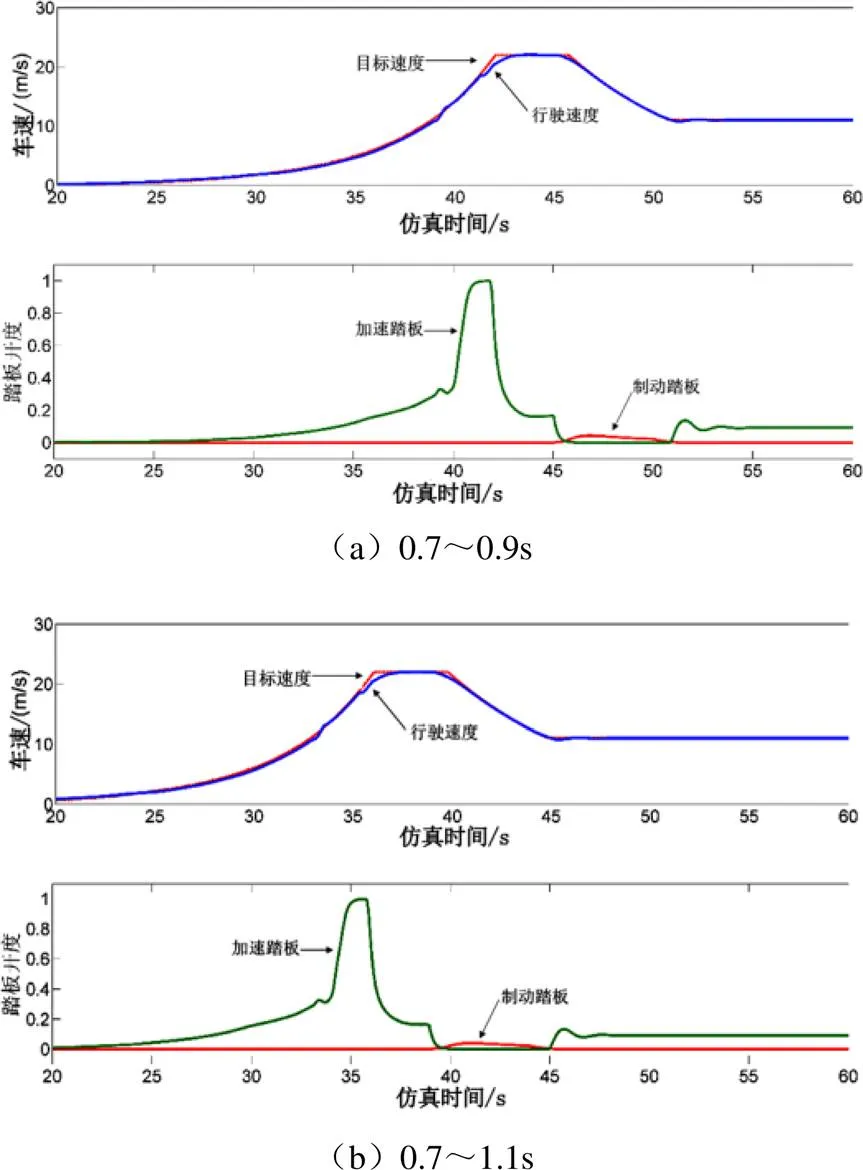
如图6所示,预瞄区间越大,速度上升越快,纵向加速度越大。这是由于较大的预瞄区间能够预瞄到轨迹更远处的速度,利用远处的速度进行决策会有更高的车速参与,使车速更快上升。
对于预瞄点个数的影响,不同预瞄点个数对车速跟随影响的曲线如图7所示。
从预瞄点个数的角度分析,跟随效果无明显变化,但在仿真过程中,仿真时间差别较大:预瞄点个数越多,仿真时间越长;反之,仿真时间越短。

图7 预瞄点个数对车速跟随影响曲线图
(2)决策意愿和偏差的仿真分析。
对于决策意愿,考查跟随误差权重和舒适度权重对纵向加速度决策的影响,不同决策权重对车速跟随效果的影响结果如图8所示。

图8 不同决策权重对车速跟随效果影响曲线图
如图8所示,权重值之比/的值越大,纵向加速度越小,跟随精度越低;/的值越小,纵向加速度越大,跟随精度越高。具体跟随效果及纵向加速度曲线如图9所示。
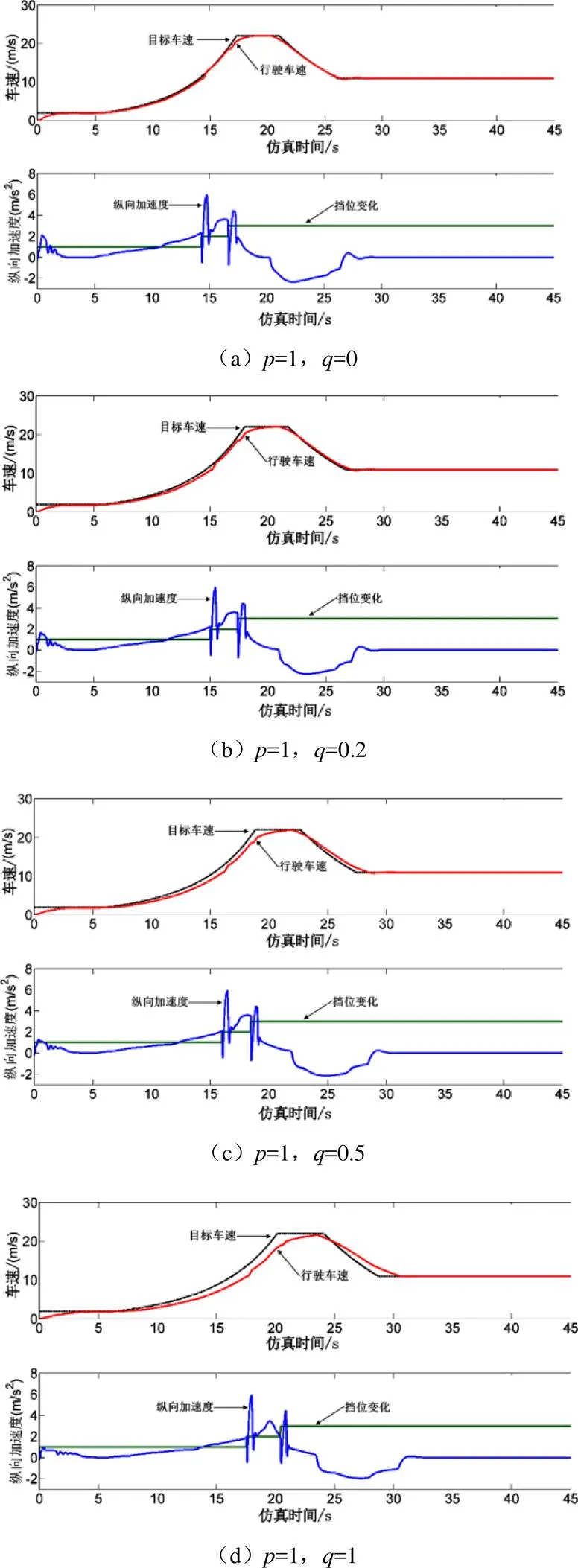
图9 车速跟随效果与纵向加速度曲线
从图9可以看到,双目标决策对纵向加速度影响明显,提高加速度权重的比重能够实现较好的乘坐品质。
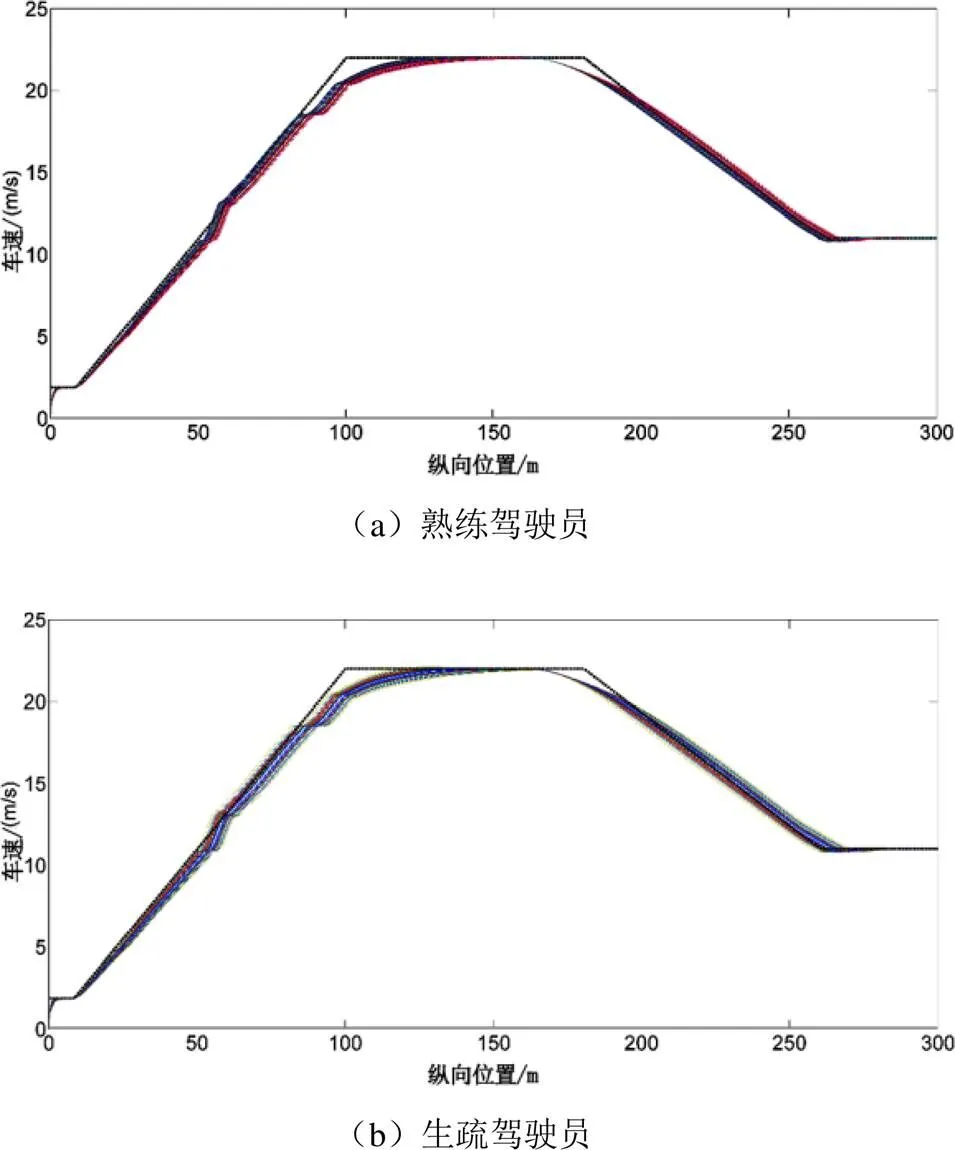
图10 驾驶员50次仿真跟随结果曲线
如图10所示,熟练驾驶员的跟随误差总体偏小,生疏驾驶员的跟随误差总体偏大。
(3)2阶预瞄程度的仿真分析。
针对2阶预瞄程度的影响进行仿真分析,不同程度2阶预瞄的车速跟随效果曲线如图11所示。

图11 不同程度2阶预瞄的车速跟随效果曲线
如图11所示,=0.9的2阶预瞄程度速度跟随精度有一定程度的提高。
6 总 结
改进了基于最优预瞄的驾驶员纵向加速度模型,以跟随速度为参考量,提出多点多目标的2阶预瞄决策模型,并以预瞄视野、决策意愿和决策偏差表征驾驶员的驾驶风格进行建模,通过仿真得到以下结论。
(1)多点预瞄的驾驶员模型,以预瞄窗口权重、预瞄区间大小及预瞄点个数区分驾驶员,研究3种不同参数对驾驶员操作及车辆对目标速度的跟随效果的影响。结果显示:预瞄窗口是对远近重要程度的选择,近处优先的驾驶方式下,车辆的跟随效果更好,相对的纵向加速度也越大;预瞄区间越长,驾驶员决策行为越提前,得到的车辆操控方式越平缓,车辆的纵向加速度越小;预瞄点个数对轨迹跟随及驾驶员操作的影响并不大,对仿真时间影响明显,预瞄点个数越多,仿真时间越长。
(2)多目标决策驾驶员模型,在跟随精度与纵向加速度之间进行平衡,体现不同驾驶员的驾驶意愿,表现其驾驶风格。双目标决策算法,从最优控制的角度描述驾驶风格,具备滚动、预测、寻优的理念,控制效果平顺合理。
(3)基于决策偏差精度不同的驾驶员建模方法,将原有最优预瞄决策与决策偏差精度建模相结合,区分不同能力驾驶员的决策效果。利用人类决策误差符合正态分布的概念进行建模,在50次仿真中,决策偏差精度不同的驾驶员体现出整体上的跟随差异。
[1]王超,郭孔辉,许男,等.表征驾驶风格和驾驶员能力的驾驶员模型[J].北京理工大学学报,2019,39(1):41-45.
[2]王艺兵,于培人,王占林.驾驶员模型技术发展研究[J].山东纺织工学院学报,1996,9(2):78-84.
[3]VÖGEL M,VON STRYK O,BULIRSCH R,et al. An Optimal Control Approach to Real-Time Vehicle Guidance[M]. Springer Berlin Heidelberg,2003:84-102.
[4]BUTZ T,VON STRYK O. Optimal Control Based Modeling of Vehicle Driver Properties[C]//SAE World Congress & Exhibition.2005.
[5]FREZZA R,SACCON A,MINEN D. Smart Driver:A Research Project for Closed Loop Vehicle Simulation in MSC. ADAMS[J]. Multi-body Dynamics:Monitoring and Simulation Techniques III,2004:401-413.
[6]FREZZA R,SACCON A,BACCHET D. Smart Driver:A Sensor Based Model of a Car Driver for Virtual Product Development[C]// IEEE/ASME International Conference on Advanced Intelligent Mechatronics.2003(1):366-370.
[7]GRAY A,GAO Y,HEDRICK J K,et al. Robust Predictive Control for Semi-Autonomous Vehicles with an Uncertain Driver Model[C]//Intelligent Vehicles Symposium(IV). IEEE,2013:208-213.
[8]CHEN L K,ULSOY A G. Identification of a Driver Steering Model,and Model Uncertainty,from Driving Simulator Data[J]. Journal of Dynamic Systems Measurement and Control,2001,123(4):623-629.
[9]ZAFEIROPOULOS S,TSIOTRAS P. Design of a Lane-Tracking Driver Steering Assist System and Its Interaction with a Two-Point Visual Driver Model[C]// 2014 American Control Conference(ACC). IEEE,2014:3911-3917.
[10]LENAIN R,THUILOT B,CARIOU C,et al. High Accuracy Path Tracking for Vehicles in Presence of Sliding:Application to Farm Vehicle Automatic Guidance for Agricultural Tasks[J]. Autonomous Robots,2006,21(1):79-97.
[11]LENAIN R,THUILOT B,CARIOU C,et al. Model Predictive Control for Vehicle Guidance in Presence of Sliding:Application to Farm Vehicles Path Tracking[C]// 2005 IEEE International Conference on Robotics and Automation. IEEE,2005:885-890.
2021-04-15
U462:TP391.9
A
10.14175/j.issn.1002-4581.2021.04.001
1002-4581(2021)04-0001-06
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
汽车维护与修理(2018年1期)2018-04-04 01:13:22
公民与法治(2016年4期)2016-05-17 04:09:26
系统医学(2016年8期)2016-02-20 02:55:08
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
警察技术(2013年1期)2013-03-20 14:11:16
