基于实航数据的定常海流动力学模型验证评估
2021-09-08 08:19吴小涛
数字海洋与水下攻防 2021年4期
吴小涛,赵 冉,乔 冰
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
海流是重要的海洋环境因素,影响水面、水下设备的姿态、速度、位置及能耗,在UUV(Unmanned Underwater Vehicle)路径规划、精确控制等算法设计时必须考虑海流的影响,需要对海流建模并研究对被控对象的影响。海流可以分为定常流、不定常海流,绝大部分海流都随时间、海域变化,但是在较小的时间、空间尺度内海流可近似为定常流。定常流建模相对简单,使用时可以直接在UUV动力学模型的速度项叠加海流速度[1];对于随时间和空间变化的不定常流,目前一般采用 X波段雷达测量特定海域海流数据[2],对实测海流数据进行插值和平滑处理[3],然后利用栅格法对海流进行离散化处理,生成不同时刻的海流地图,使用时根据时间、空间信息查表获取精确海流[4]。
不定常海流的建模和使用过程较为复杂,最关键的是海流实测数据难以获取;而定常流由于使用简单方便得到了广泛应用。文献[5]设计了在定常流环境下的欠驱动AUV三维路径跟踪控制算法。文献[6]搭建了载人潜水器动力学模型,对定常流和机械手臂动作进行建模以研究对潜水器的干扰。文献[7]研究了海流、海浪干扰对潜射导弹水下发射过程的影响。文献[5]-[7]在对海流建模时均直接使用文献[1]中定义的直接在载体动力学模型叠加海流速度的处理方法,但是该模型是基于流体力学原理简化推导得到的[1,8],其可信度和准确程度并没有相应的验证文献报道和相应的支撑数据。
针对这一问题,为了验证定常海流动力学模型的正确性,提高仿真结果可信度,本文在UUV试验过程中采用流速剖面仪实时采集记录海流信息,截取典型航段数据作为验证海流模型的参考基准,在实航试验基础上分别设计了无海流、有海流的半实物仿真(Hardware In Loop,HIL)对比试验,对定常海流动力学模型的准确性进行了评估。下文所述海流均为定常海流。
1 使用的数学模型
1.1 定常海流动力学模型
实际海洋中的海流实测结果表明:海流的大小、方向与测试的时间、地理位置、地形、深度均相关,海流干扰既有确定性也有随机性[7]。定常海流速度和方向为常量,那么当水下航行体在海流中运动时,相当于在原流场上再叠加海流的流场,海流的速度是牵连速度,牵连运动为定常平移运动。在水下航行体运动的过程中,作用在航行体上的流体动力如升力、阻力和力矩等都取决于航行体相对于流体的速度、攻角和侧滑角等。因此,水下航行体动力学模型中各运动学参数在这个意义上都是相对流体的,只有在无海流时,获得的运动学参数才是相对于地面坐标系的[1],即

式中:vt为水下航行体在地面坐标系中的速度;vw为海流在地面坐标系中的速度;vtw为水下航行体相对于海流的速度。使用时可根据载体姿态将导航坐标系的定常海流投影到UUV载体坐标系,在载体坐标系中的动力学模型部分叠加载体速度和海流速度以计算载体所受力和力矩[1]。
1.2 水下航行体动力学模型
本文研究的水下航行体为圆柱形回转体,其空间运动模型由动力学模型和运动学模型组成,运动学模型是标准模型,航空航天及水下装备的运动学模型相同。运动学模型根据载体速度、角速度及各项初始值计算载体姿态、速度、位置,水下航行体动力学模型在体坐标系中的一般形式为

式(2)中等号左侧由动量和动量矩定理建立,等号右侧ΔGx、ΔGy、ΔGz是负浮力,T是螺旋桨推力,Gmx、Gmy、Gmz是质浮心距造成的力矩,Mxp为螺旋桨转动带来的失衡力矩。F…(α,β,vtw)为流体作用在 UUV 上的外力,M…(α,β,vtw)是流体造成的力矩,流体动力包含流体惯性力、流体黏性位置力、流体黏性阻尼力。
F…(α,β,vtw)及 M…(α,β,vtw)中的速度即为式(1)中载体相对于海流的速度,相应的攻角 α、侧滑角 β都需要用vtw计算,下文中半实物仿真都是采用式(2)展开后的动力学方程[1]进行仿真计算。
2 试验设计
2.1 试验设计思路
评估模型准确度的方法有很多,与实测数据对比是较为常见的一种方法。实航试验中海流通过作用在UUV上的力和力矩改变UUV的速度、姿态、轨迹;而海流模型直接影响UUV动力学模型中的速度,从而导致UUV所受流体动力、力矩发生改变。在航路相同的情况下,实航试验中影响航行的主要因素有控制算法、UUV运动特性、海流;半实物仿真试验中对应为控制算法、UUV模型、海流模型,如图1所示。

图1 实航试验与半实物仿真试验主要影响因素示意图Fig.1 Schematic diagram of main influencing factors of voyage and the HIL simulation experiment
要评估海流模型需要确保UUV模型与UUV实物动态特性一致,需要对UUV模型进行校验,详见2.2节内容。在此基础上,在半实物仿真试验中采用与实航试验相同的航路任务文件,并分别带入实航试验记录的海流参数和无海流参数进行试验,最后对比实航试验和半实物仿真试验中的 UUV姿态、速度、轨迹以评估海流模型准确程度。
2.2 UUV空间运动模型校验及验证
UUV空间运动模型需要进行校验以确保模型特性与实物动态特性一致,UUV模型的校验方法详见文献[9],简要流程如图 2所示,本文中不再赘述。UUV空间运动模型校验后能准确反映UUV的运动特性,仿真结果与实航结果可高度一致。

图2 UUV空间运动模型校验过程示意图Fig.2 Schematic diagram of calibration process of UUV spatial motion model
2.3 实航试验过程
利用UUV实航试验的剩余条次,选择试验海域中海流较为明显的航路进行验证试验。试验限定在一个经纬度跨度不到0.15°的矩形海域内,试验从上午约10点开始,下午18点前结束,时间跨度不大于8 h。试验航线及海流验证航路如图3所示,图中经纬度整数部分做了处理,小数部分保留真实数值。

图3 航段示意图Fig.3 Schematic diagram of voyage section
试验时 UUV在水下按照设定航线自主定深10 m定速5 kn航行,流速剖面仪安装在试验船上,安装深度水下2.2 m,试验船尾随UUV航行并保持一定安全距离(约 500~800 m),近似认为流速剖面仪测得海流与UUV自主航行所处海流环境相同。流速剖面仪测得的各验证航段海流信息整理在表1中,表中的航线角是预设航线的夹角,UUV在无海流情况下航线角与航向角一致。

表1 海流模型验证试验工况Table 1 Current model validation conditions
2.4 半实物仿真试验简介
参与半实物仿真试验的UUV设备有:控制器、控制台、舵机、惯导、深度传感器;仿真系统由仿真主机、仿真监控机、深度模拟器、三轴仿真转台组成。半实物仿真时,控制器根据固联在三轴转台上的惯导、安装在深度模拟器上的深度传感器等敏感元件感受自身姿态、速度、深度等信息,根据控制算法和航路文件解算出舵角和电机转速发送给舵机、电机模型;半实物仿真系统采集舵角反馈和电机指令信息输入 UUV空间运动模型,模型根据舵角、电机转速及初始参数实时计算出运载平台在航行过程中的姿态、深度、速度、位置信息,仿真机将这些载体信息发送给三轴仿真转台、深度模拟器,组成一个信息闭环进行半实物仿真试验。
3 对比试验结果
3.1 试验过程
半实物仿真试验中各航段的航路文件应保持一致,根据实航试验中截取的航段,每个航段应安排相同海流和无海流两条次半实物仿真试验。试验结果表明:水平面海流仅影响载体轨迹、航向角和速度,由于UUV采用了定航速控制,因此影响UUV的电机转速。下面分别对5个航段的试验工况、验证试验结果进行详细说明。
3.2 第一航段验证
第一航段试验工况设置如表 2所示,试验结果曲线见图 4-5。第一航段航线角 270°,海流方向330°,属于侧向流。由图4可见:实航试验时UUV按照设定航迹航行;有海流仿真试验中UUV轨迹与设定航线保持一定距离(约25 m)且偏向海流的流向。由图5可见:无海流仿真时,UUV航向角约 270°,与设定航线角一致,电机转速约220 r/min,与湖试中实测数据相同。有海流仿真试验的航向角约249°,电机转速在240~260 r/min波动,与实航试验中的内记数据一致。

表2 第一航段验证试验工况设置Table 2 Settings of validation conditions for the first voyage

图4 第一航段验证轨迹对比曲线Fig.4 Comparison curve of the first trajectory
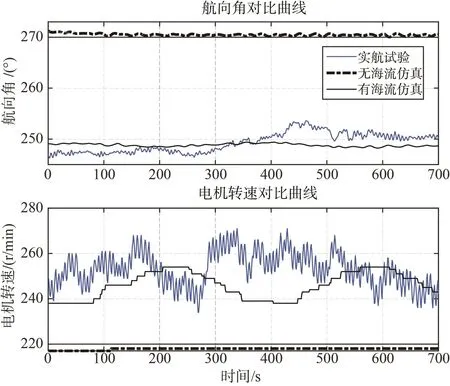
图5 第一航段验证航向角、电机转速对比曲线Fig.5 Comparison curve of heading angle and motor speed in the first voyage
3.3 第二航段验证
第二航段试验工况设置如表3所示,试验结果曲线见图 6-7。第二航段航线角 114°,海流方向325°,介于侧向流和逆向流之间。由图6可见:实航试验时UUV按照设定航迹航行;有海流仿真试验中UUV轨迹与设定航线保持一定距离且偏向海流的流向。由图7可见:无海流仿真时,UUV航向角约 114°,与设定航线角一致,电机转速约220 r/min,与湖试中实测数据相同。有海流仿真试验的航向角在 125°~130°之间,电机转速在300~330 r/min波动,与实航试验中的内记数据一致。
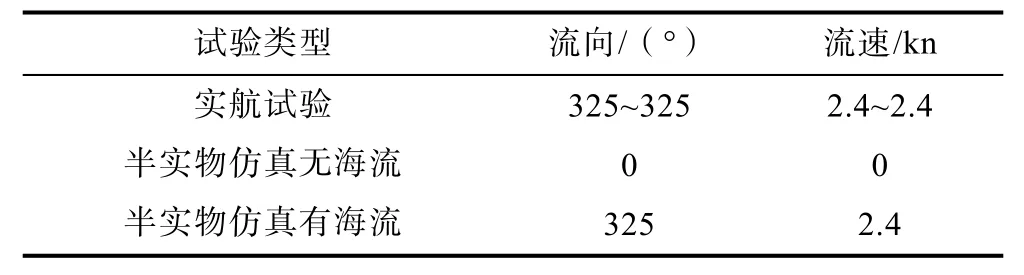
表3 第二航段验证试验工况设置Table 3 Settings of validation conditions for the second voyage

图6 第二航段验证轨迹对比曲线Fig.6 Comparison curve of the second voyage

图7 第二航段验证航向角、电机转速对比曲线Fig.7 Comparison curve of heading angle and motor speed in the second voyage
3.4 第三航段验证
第三航段试验工况设置如表4所示,试验结果曲线见图 8-9。第三航段航线角 90°,海流方向337°,属于侧向流,但是来流方向与第一航段刚好相反。由图8可见:实航试验时UUV按照设定航迹航行;有海流仿真试验中UUV轨迹与设定航线保持一定距离(约 25 m)且偏向海流的流向。由图9可见:无海流仿真时,UUV航向角约90°,与设定航线角一致,电机转速约 222 r/min,与湖试中实测数据相近。有海流仿真试验中UUV为抵抗海流,航向角约110°,航线角与航向角相差20°,第一航段相差21°,高度吻合;电机转速在233 r/min附近波动,与实航试验中的内记数据一致。

表4 第三航段验证试验工况设置Table 4 Settings of validation conditions for the third voyage

图8 第三航段验证轨迹对比曲线Fig.8 Comparison curve of the third voyage

图9 第三航段验证航向角、电机转速对比曲线Fig.9 Comparison curve of heading angle and motor speed in the third voyage
3.5 第四航段验证
第四航段试验工况设置如表5所示,试验结果曲线见图10-11。第四航段航线角310°,海流方向350°,介于顺流和侧向来流之间。由图 10可见:实航试验时,UUV按照设定航迹航行;有海流仿真试验中UUV轨迹与设定航线保持一定距离且偏向海流的流向。由图11可见:无海流仿真时,UUV航向角约 328°,与设定航线角一致,电机转速约222 r/min,与湖试中实测数据相近。有海流仿真试验中UUV航向角约311°,与实航试验中实测航向角 310°一致;由于顺流,有海流仿真试验中电机转速下降,在175~190 r/min附近波动,与实航试验中的内记数据一致。

图10 第四航段验证轨迹对比曲线Fig.10 Comparison curve of the fourth voyage

图11 第四航段验证航向角、电机转速对比曲线Fig.11 Comparison curve of heading angle and motor speed in the fourth voyage

表5 第四航段验证试验工况设置Table 5 Settings of validation conditions for the fourth voyage
3.6 第五航段验证
第五航段试验工况设置如表6所示,试验结果曲线见图12-13。第五航段航线角182°,海流方向350°,属于逆流航行。由图12可见:实航试验时,UUV按照设定航迹航行;有海流仿真试验中UUV轨迹与设定航线保持一定距离且偏向海流的流向。由图13可见:无海流仿真时,UUV航向角约182°,与设定航线角一致,电机转速约 222 r/min,与湖试中实测数据相近。有海流仿真试验中UUV航向角约187°;电机转速约272 r/min,与实航试验中的内记数据一致。

图12 第五航段验证轨迹对比曲线Fig.12 Comparison curve of the fifth voyage

图13 第五航段验证航向角、电机转速对比曲线Fig.13 Comparison curve of heading angle and motor speed in the fifth voyage

表6 第五航段验证试验工况设置Table 6 Settings of validation conditions for the fifth voyage
4 结束语
本文在UUV试验过程中采用流速剖面仪实时采集记录海流信息及UUV状态信息,在实航试验基础上分别设计了无海流、有海流的半实物仿真对比试验,对海流动力学模型的准确性进行了评估。得到如下结论。
1)实航试验中,水平面内的海流主要影响UUV的经纬度、航向角和速度(如果是定航速控制则影响电机转速);
2)仿真过程中海流模型对 UUV模型的航向角、速度影响与实际海流对UUV的航向角、速度影响一致;
3)实航试验中海流影响UUV经纬度,使UUV位置偏向海流方向,实测位置偏差约 2~4 m;仿真过程中UUV位置偏向海流方向10~30 m,与海流与航线之间的夹角有关,侧向海流时位置偏差更大。
当然闭环仿真中仿真结果的影响因素较多,动力学模型中叠加海流速度后导致UUV模型侧滑角超出UUV模型设定范围,也可能导致模型准确度下降,海流模型造成仿真轨迹误差大的根本原因及改进方法还需要进一步研究。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
疯狂英语·新读写(2021年6期)2021-08-05
计算机应用与软件(2021年6期)2021-06-21
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
当代陕西(2019年17期)2019-10-08
师道(2018年6期)2018-07-16
创新作文(1-2年级)(2017年7期)2017-12-26