悬停系统运行品质对潜艇悬停操纵的影响
2021-09-07 02:12:12杨国栋彭立程
造船技术 2021年4期
胡 坤, 何 斌, 杨国栋, 彭立程
(海军潜艇学院,山东 青岛 266199)
0 引 言
现代潜艇悬停的完整概念是以最低的噪声、最低的能量消耗和最简便的操作,在任何海区条件下,使潜艇按战术要求偏差悬停在指令深度上,或按规定的方式过渡至新的指令深度上悬停。水下悬停与潜坐海底、潜坐液体海底和水下锚泊并称为潜艇水下停泊方式之一[1]。潜艇水下悬停可消除螺旋桨噪声和水动力噪声、降低机械振动噪声、提高声呐作用距离、节省能源,对提高潜艇的战斗力具有重大的现实意义和战术价值。
潜艇的水下悬停由专门的悬停系统控制实现[2],悬停系统运行品质(包括流量计误差、注排水速率、最小注排水量等)的高低对潜艇悬停的战术使用具有直接影响。分析悬停的战术运用对悬停系统性能的需求,以模型潜艇为研究对象,在潜艇悬停运动数学模型的基础上进行仿真计算,研究悬停系统的运行品质对潜艇悬停操纵的影响,在仿真结果的基础上分析悬停系统的运行品质与悬停稳定性之间的逻辑关系,为优化潜艇悬停系统的操控性能提供理论依据。
1 悬停系统的组成及工作原理
1.1 悬停系统组成
潜艇悬停系统一般由专用悬停水舱(无悬停水舱的潜艇可用浮力调整水舱代替)和悬停控制系统组成。
专用悬停水舱是存储用来调节潜艇浮力平衡水的舱室,其容积约为潜艇水下排水量的0.6%~0.8%。悬停水舱耐压,其纵向位置在潜艇的水下容积中心附近,垂向位置靠近舱底。
悬停控制系统由气压平衡系统、悬停排注水系统和悬停控制装置组成。气压平衡系统是使悬停水舱的气压与舷外海水压力保持一定差值的空气压力平衡系统;悬停排注水系统是利用专用水泵或悬停水舱与舷外海水压力差对悬停水舱水量进行控制的海水系统;悬停控制装置由深度传感器、流量计、压力计、调节阀等硬件设备和控制算法及处理软件等组成。
1.2 悬停系统工作原理
当设置悬停深度后,自动气压平衡系统自动开、关充气阀和放气阀,控制悬停水舱内的初始压力等于或小于舷外压力,在深度传感器接收潜艇实际深度后,与指令深度进行比较,若出现偏差,则控制系统按确定的控制规律进行运算,并按规定程序输出控制指令,启动悬停水舱排注水机构进行排注水,与此同时流量计量仪或水舱水量计量仪将当前存水量反馈至控制系统,参与控制规律运算,当实际深度达到指令深度后系统处于平衡状态。
2 悬停战术运用对悬停系统性能需求
潜艇水下悬停的战术要求是能够长时间在任何海区内、在任何海洋环境条件下悬停在任何指令深度上,而且成功率须接近100%。悬停的战术运用对悬停系统的需求包括:
(1)能够在各种不同的海洋环境条件下进行悬停。当某海区的海水密度随下潜深度变化呈正梯度时,或在海区某深度上出现海水密度为正梯度层时,潜艇航速降为零且均衡良好后,可停在某深度上,不上浮也不下潜,这种操纵方式称为沉液体海底,并不是现代意义上的悬停。现代潜艇应根据战术和提高声呐作用距离的需要,按照规定的偏差悬停在指令深度上,悬停海区的海水密度梯度可能为正、可能为负,也可能为均匀层,而且须考虑外界干扰对潜艇的影响。
(2)能够使潜艇的噪声达到最低。安静性和隐蔽性是现代潜艇的主要战术和技术指标,因此悬停必须最大限度地降低噪声。注排水、充放气产生的噪声是悬停时的主要噪声源。如果不能降低悬停系统执行机构的振动和空气噪声,不能降低其流体的冲击和摩擦噪声,就失去悬停的战术意义。因此,悬停系统采用的注排水速率也应控制在一定范围之内。过低的注排水速率可能导致控制不住潜艇,而注排水速率过高则增加水泵噪声。另外,在不影响悬停精度的前提条件下,单位时间内的注排水次数也应越少越好。
(3)能够按战术要求悬停在指令深度上。现代悬停战术要求潜艇必须按规定的稳定精度悬停在指令深度上,或按规定的指标改变至新的指令深度上悬停。对悬停控制系统来说,过低的控制精度对潜艇水下悬停没有意义,过高的控制精度没有必要且会增加单位时间内的注排水次数,不利于潜艇的隐蔽。
(4)能够使潜艇的能量消耗达到最低。如果不能降低悬停系统执行机构的能量消耗,在潜艇上安装悬停系统也失去了一半意义。因此,悬停系统水泵的功率不应过大,单位时间内的注排水次数也应降至最低。
(5)操作简单。目前悬停操纵的相对复杂性对艇员素质要求较高,潜艇悬停系统要求经过简单训练后艇员就能熟练地完成操作。
3 悬停操纵运动控制数学模型
3.1 悬停运动基本数学模型
潜艇在水下悬停时,先降至经航工况,经准确均衡后再停下。根据潜艇垂直面运动规律,水下悬停类似于潜艇在垂直面的惯性潜浮运动,因此,对潜艇垂直面操纵运动非线性方程[3-4]进行合理简化,则潜艇水下悬停运动的基本数学模型为
(1)

3.2 海洋环境干扰力模型
海洋环境对潜艇悬停的影响非常复杂,为方便研究,有必要对干扰力模型进行一定的简化。由于海水温度、盐度对潜艇悬停的影响通过海水密度的变化反映出来,同时海水压力对潜艇悬停的影响通过艇体压缩反映出来[5],因此将干扰力模型统一为海水密度变化模型和艇体压缩模型。
(1)海水密度变化模型
各种深度下海水密度变化产生的力P3为
P3=-V(ρ0-ρ)
(2)
式中:V为潜艇水下全排水量;ρ0为潜艇初始深度下的海水密度;ρ为潜艇当前深度下的海水密度。
在均匀层情况下取海水密度为定值,即认为海水密度不变化。
在正梯度情况下密度变化为
(3)
式中:ρ(ζ)为当前深度下的海水密度;ζ为当前深度;ζ0为初始深度。
在负梯度情况下密度变化为
ρ(ζ)=1.025-0.000 01(ζ-ζ0)
(4)
(2)艇体压缩模型
艇体压缩量随深度增加而变化,艇体压缩产生的力P4为
P4=0.029(ζ-ζ0)
(5)
3.3 悬停水舱注排水控制模型
潜艇悬停时所用到的控制执行机构主要是悬停专用水舱。悬停水舱实际容积Q为考虑相应控制规律、悬停水舱初始注水量Q0和最大可能的注排水量Qmax后的水舱状态方程的积分结果。
悬停专用水舱状态方程为
(6)


(7)
式中:Q1max为最大注排水速率。

(8)
3.4 悬停水舱阀门开启模型
在初始状态下水舱阀门全关,阀门开启系数Ko=0,在接收到注排水或调水控制信号后阀门在响应时间内按线性过程由全关变化至全开。当正在进行注排水时,水舱阀门全开,此时阀门开启系数Ko=1,在接收到停止注排水或调水控制信号后阀门在响应时间内按线性过程由全开变化至全关。
3.5 模型有效性分析
为验证悬停操纵运动控制数学模型的有效性,对负梯度条件下的潜艇悬停进行仿真,仿真条件尽可能与模型潜艇操纵试验时的海洋环境接近。具体仿真环境:海水密度梯度类型为弱负梯度,梯度值为-0.000 015,悬停稳定深度为40.0 m,初始不均衡量为0.5 t,悬停水舱注排水速率为10.0 L/s。数学模型有效性对比如表1所示。
由表1可知:在相似海洋环境条件下,悬停仿真值与试验值非常接近,特别是单位时间的注排水次数几乎相等。单位时间注排水量的误差也不到3%。可以得出结论:采用的潜艇悬停运动数学模型能够较真实地反映潜艇的实际悬停操纵过程,从而验证潜艇悬停运动数学模型的有效性。

表1 数学模型有效性比对
4 悬停系统运行品质对水下悬停的影响
悬停系统的运行品质对潜艇能否按照战术需求进行精准的悬停操纵具有关键作用。其中,尤为关键的3个核心控制参数是流量计误差、悬停水舱注排水速率和最小注排水量。
海水比重垂直面的变化梯度通常有3种典型形式:(1)海水密度随深度增加而增大,即密度呈正梯度变化;(2)海水密度不随深度变化,即密度均匀层;(3)海水密度随深度的增加而减小,即密度呈负梯度变化。在这3种典型形式中,负梯度类型对悬停系统的要求较为苛刻,潜艇如果能在负梯度类型的海水中悬停,那么在均匀层和正梯度类型的海水中一样能够准确悬停。所有仿真均在对悬停系统性能要求较为苛刻的负梯度类型条件下进行。
基于悬停运动基本数学模型、干扰力模型和悬停水舱注排水控制模型,以模型潜艇为研究对象,采用C#语言编写潜艇水下悬停操纵运动仿真软件[6-7],通过悬停仿真进一步分析流量计误差、悬停水舱注排水速率和最小注排水量对潜艇悬停操纵的影响。
4.1 流量计误差对悬停的影响
悬停水舱的流量计误差大小对潜艇水下悬停非常关键。潜艇在水下悬停时,航速为零,垂向运动速度也较小,潜艇的惯性又非常大,因此难以实时检测垂向作用力,也难以实时检测加速度,流量计存在误差会造成艇轻或艇重及系统振荡,因此控制流量计误差具有重要意义。在理想情况下,流量计误差应为零,但在现实条件下,流量计存在误差无法避免,需要通过悬停仿真分析流量计误差对悬停操纵的影响。
图1~图3分别为流量计误差为0 L/s、-0.2 L/s、+0.5 L/s时的悬停仿真曲线,+表示多注(排),-表示少注(排)。仿真条件设置:海水密度梯度类型为负梯度(梯度值为-10-6),悬停水舱注排水速率为10.0 L/s,初始不均衡量为0.5 t,悬停水舱阀门延迟时间为6.0 s,目标悬停深度为100.0 m。
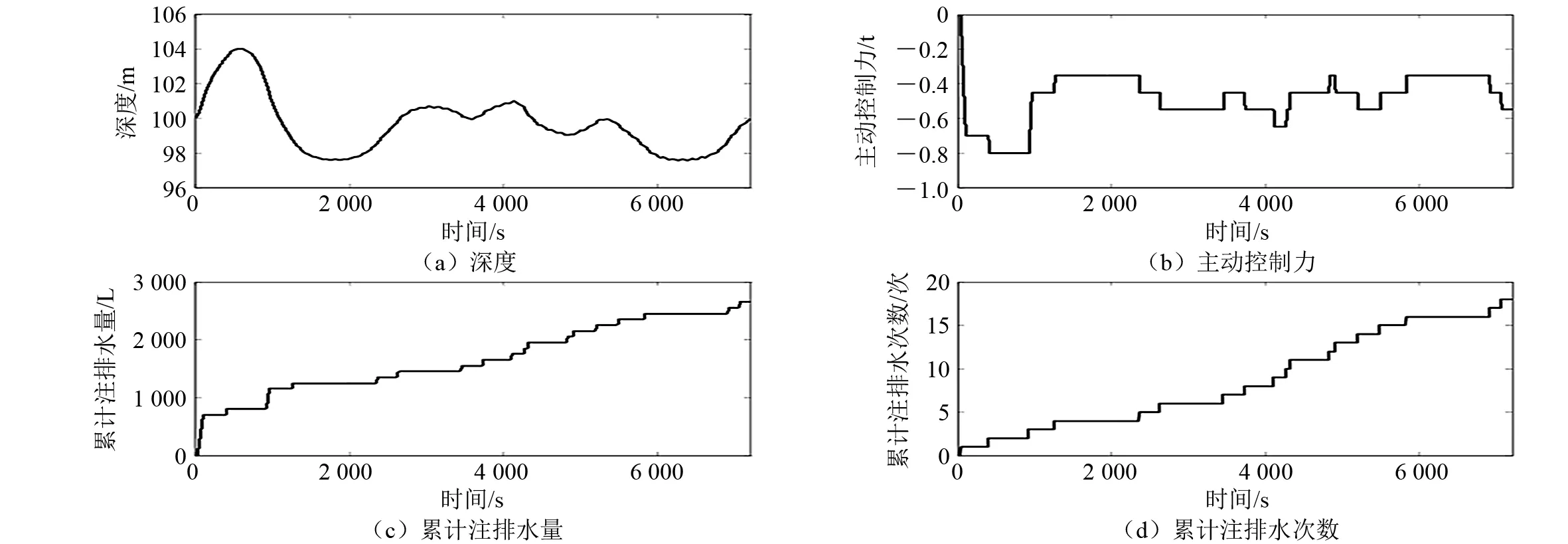
图1 无流量计误差时的悬停仿真曲线

图2 流量计误差为-0.2 L/s时的悬停仿真曲线
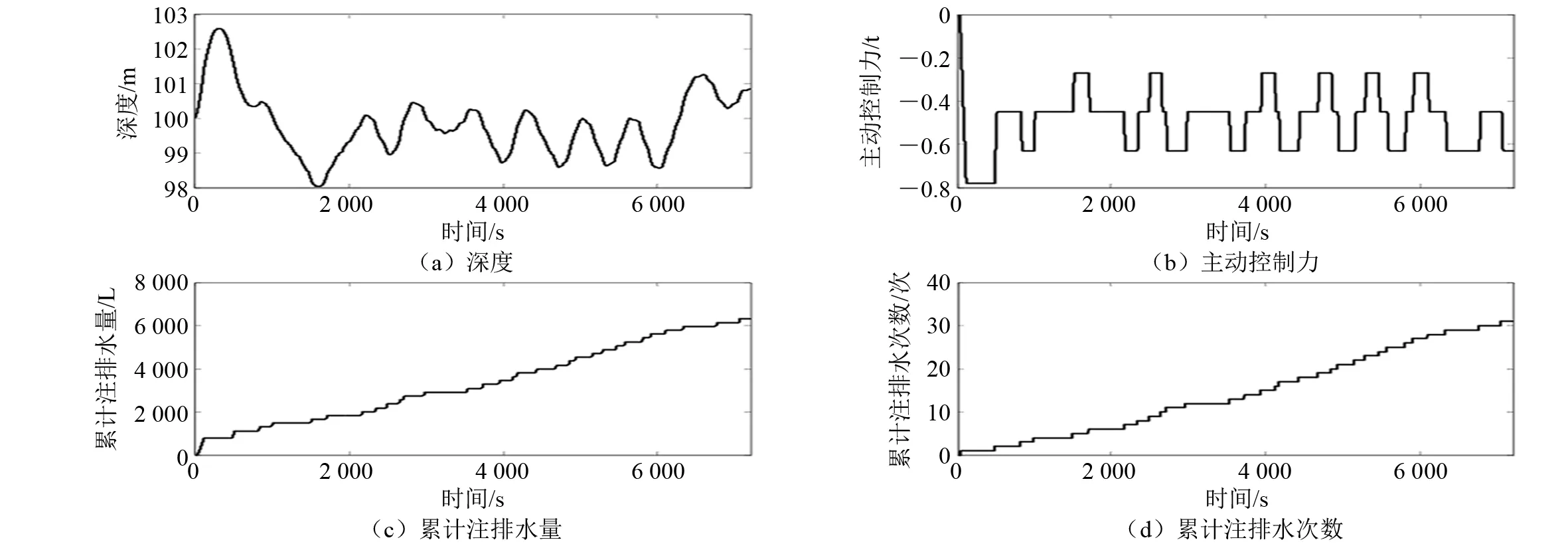
图3 流量计误差为+0.5 L/s时的悬停仿真曲线
表2为流量计误差为0 L/s、±0.2 L/s、±0.5 L/s时的悬停仿真数据。需要特别注意的是,表2中最后3项数据为平均注排水量、平均注排水时间和平均注排水次数,而在仿真图中为累计注排水量和累计注排水时间,二者有区别。表2中的挽回深度定义为当潜艇存在初始不均衡量时,经过一次注或排水,潜艇偏离初始深度的最大值。

表2 流量计误差对潜艇悬停的影响
由仿真数据可看出:当流量计不存在误差时,单位时间内平均注排水量、平均注排水时间和平均注排水次数分别为1 325 L、132.5 s和9次;当流量计误差增至0.5 L/s时,单位时间内平均注排水量、平均注排水时间和平均注排水次数均有不同程度的增加,分别为3 165 L、316.5 s和15.5次;当流量计存在负误差(实际注排水量小于流量计显示注排水量)时,潜艇挽回深度有明显增加;当流量计存在正误差(实际注排水量大于流量计显示注排水量)时,潜艇挽回深度变化不大,甚至比流量计无误差时还有少许减小,并且流量计存在负误差时较存在正误差时更难控制。
当存在流量计误差时,单位时间内平均注排水次数明显比不存在流量计误差时多,随着流量计误差的增大,单位时间内平均注排水次数也变大;当流量计误差为负时,初始挽回不能遵循流量计误差为正时的操纵规律,依据操纵的效果适时增大注排水量。
4.2 注排水速率对悬停的影响
悬停水舱的不同注排水速率对潜艇悬停操纵有较大的影响,通过悬停仿真分析悬停水舱注排水速率对悬停操纵的影响。
图4~图6分别为悬停水舱注排水速率为6.0 L/s、10.0 L/s、20.0 L/s时的悬停仿真曲线。仿真条件设置:海水密度梯度类型为负梯度(梯度值为-10-6),目标悬停深度为100.0 m,悬停水舱阀门延迟时间为6.0 s,初始不均衡量为0.5 t。
图4 注排水速率为6.0 L/s时的悬停仿真曲线

图5 注排水速率为10.0 L/s时的悬停仿真曲线

图6 注排水速率为20.0 L/s时的悬停仿真曲线
表3为悬停水舱注排水速率为6.0 L/s、8.0 L/s、10.0 L/s、15.0 L/s、20.0 L/s时的悬停仿真数据。

表3 注排水速率对潜艇悬停的影响
由仿真数据可看出:挽回深度和单位时间内平均注排水时间基本上随着注排水速率的增大而减小,但并不是注排水速率越大越有利于潜艇的悬停操纵;随着注排水速率增加,虽然在累计单位时间内平均注排水时间一直在减小,但平均注排水量变化趋势是先减小后增大,平均注排水次数也是先减小后增大。
从有利于潜艇悬停的角度考虑:注排水速率不宜过小,太小的注排水速率使挽回深度、单位时间内的平均注排水量、平均注排水时间和平均注排水次数均过大,不利于深度的稳定;但注排水速率也不宜过大,过大的注排水速率在负梯度条件下反而使平均注排水量和平均注排水次数增大,会增大悬停水舱水泵的噪声,不利于潜艇的隐蔽。总的来说,悬停水舱的注排水速率为10.0~15.0 L/s对潜艇的悬停控制效果最佳。
4.3 最小注排水量对悬停的影响
在潜艇悬停到达稳定阶段后,每次注排水的最小量定义为最小注排水量。最小注排水量对潜艇悬停操纵也是一个非常重要的因素。悬停仿真分析最小注排水量对悬停操纵的影响,图7~图9分别为最小注排水量为50 L、100 L、200 L时的悬停仿真曲线。仿真条件设置:海水密度梯度类型为负梯度(梯度值为-10-6),目标悬停深度为100.0 m,悬停水舱注排水速率为10.0 L/s,悬停水舱阀门延迟时间为6.0 s,初始不均衡量为0.5 t。表4为最小注排水量为50 L、100 L、150 L、200 L、400 L时的悬停仿真数据。

表4 最小注排水量对潜艇悬停的影响
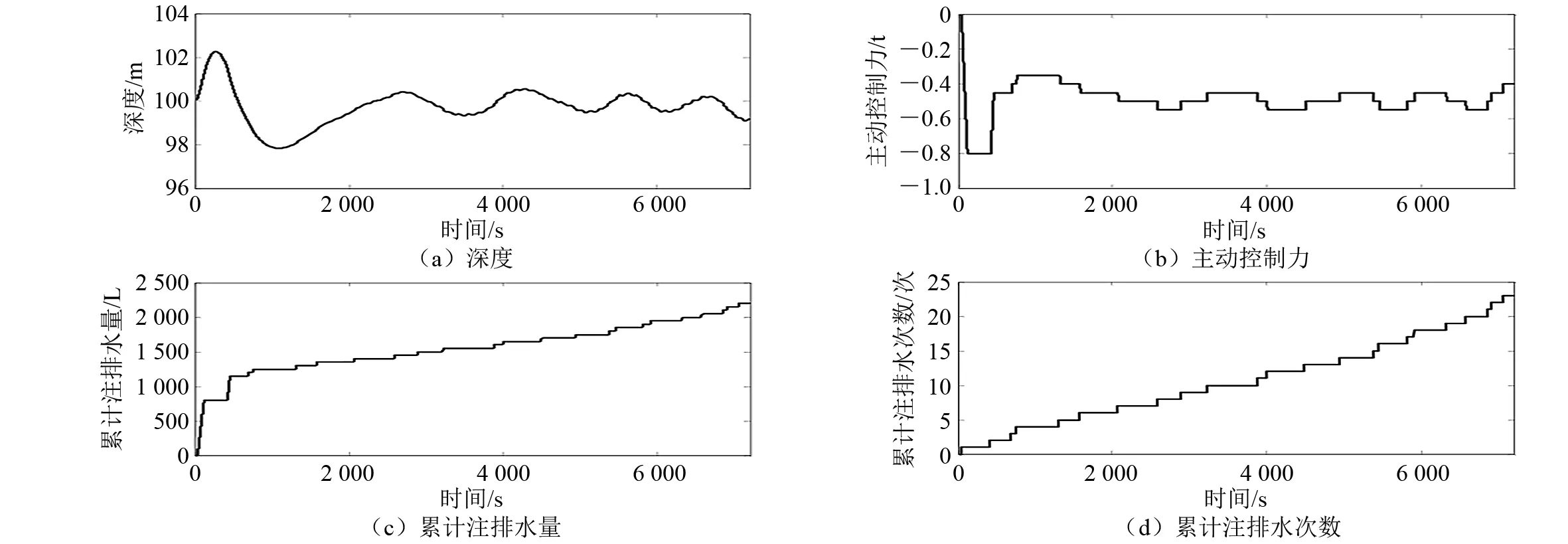
图7 最小注排水量为50 L时的悬停仿真曲线

图8 最小注排水量为100 L时的悬停仿真曲线
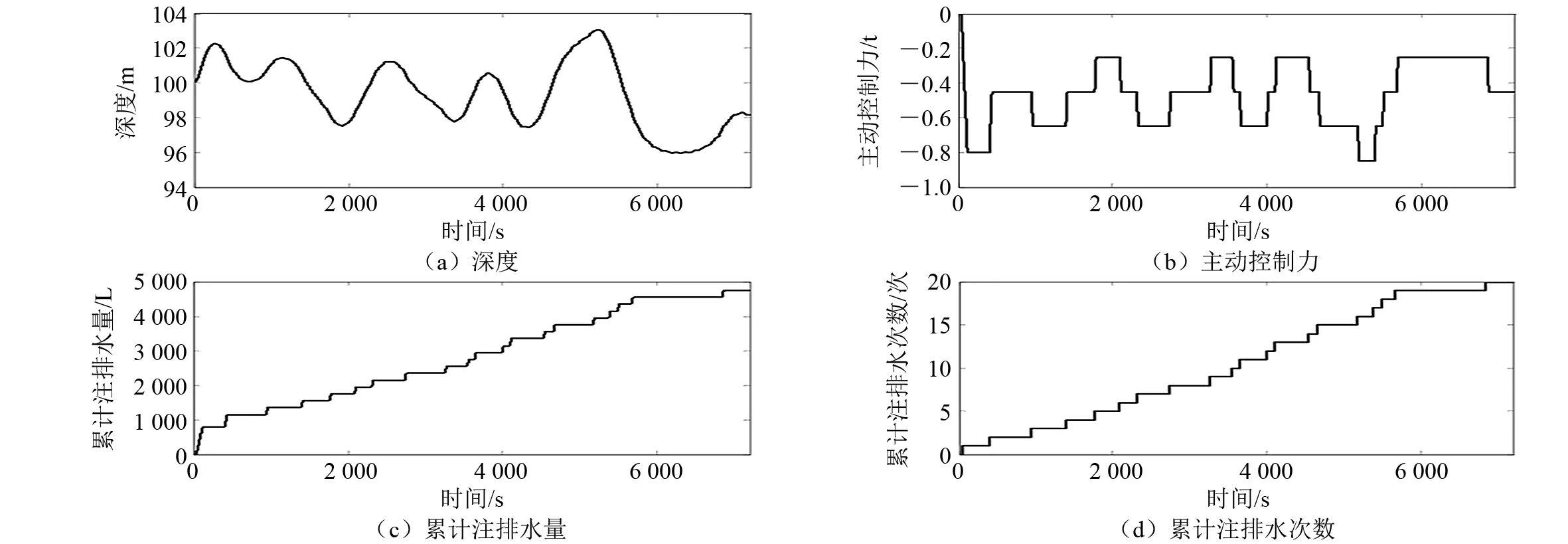
图9 最小注排水量为200 L时的悬停仿真曲线
由仿真数据可看出:平均注排水量和平均注排水时间随着最小注排水量的增加而增大,而平均注排水次数随着最小注排水量的增大呈先减小后增大的规律。当最小注排水量在50~100 L时,悬停深度控制效果较好,单位时间内平均注排水量和平均注排水时间不大,平均注排水次数也相对较小;最小注排水量超过200 L会引起深度急剧变化,甚至会达到失控的程度。原因在于过大地控制水量形成较大的垂向速度,进而形成较大的潜艇垂向惯性,一旦形成较大的惯性,加上注排水需要一定的时间,则会造成控制效果不理想。这说明在潜艇悬停中,只有采取小量多次的方式进行才能防止潜艇形成相反的运动惯性,减少潜艇均衡频度。
5 结 论
以潜艇悬停系统运行品质的3个关键指标,即流量计误差、悬停水舱注排水速率和最小注排水量为参变量进行悬停仿真,分析悬停系统运行品质对潜艇悬停的影响。研究表明:流量计误差是导致单位时间内均衡次数增加的一个很重要的原因,流量计误差应严格控制在0~0.5 L/s为宜;注排水速率越大,相同条件下的挽回深度越小,较大的注排水速率对于潜艇深度悬停控制的有效性就越大,但注排水速率也不是越大越好,过大的注排水速率会加大水泵的噪声,而且随着注排水速率的增加,单位时间内的均衡次数非但没有减少,反而有增加的趋势,因此注排水速率取10.0~15.0 L/s可满足悬停操纵的需要;为了不使潜艇在垂直面内产生较大的惯性,最小注排水量不宜过大,在50~100 L效果最佳,既不会使潜艇产生较大的惯性,也可较好地对潜艇深度进行有效控制。
猜你喜欢
黑龙江科学(2024年4期)2024-03-05 04:47:08
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:38
小哥白尼(军事科学)(2021年6期)2021-11-02 05:25:10
中国舰船研究(2021年4期)2021-08-31 00:46:04
小哥白尼(军事科学)(2021年12期)2021-03-29 00:49:14
小哥白尼(军事科学)(2021年11期)2021-02-28 08:29:32
中学生数理化·八年级物理人教版(2020年5期)2020-10-29 07:34:51
土木建筑与环境工程(2020年4期)2020-09-02 06:41:35
中国科技纵横(2019年5期)2019-04-24 03:23:14
工业设计(2016年10期)2016-04-16 02:44:13