
无刷直流电机无位置传感器位置检测技术研究
2021-09-05 02:27张兰红顾伟超
自动化仪表 2021年6期
曹 婷,张兰红,顾伟超
(1.江苏科技大学电子信息学院,江苏 镇江 212100;2.盐城工学院电气工程学院,江苏 盐城 224051;3.江苏友和动力机械有限公司,江苏 盐城 224000)
0 引言
永磁无刷直流电机具有工作效率高、使用寿命长、驱动控制简单等优点,在汽车、航空航天、工业控制等领域获得了广泛的应用[1-5]。无刷直流电机需通过检测转子位置来决定定子绕组的换相时刻。转子位置可用传感器或编码器等检测,也可通过无位置传感器位置检测技术获得。无位置传感器位置检测技术是指通过测量电气量,再经计算确定转子位置,计算出定子绕组的换相时刻。位置传感器的使用使得电机体积变大。受到外部扰动时,电机运行会产生较大的波动。这使得电机的应用发展受到限制[6]。因此,无位置传感器转子位置检测技术得到了广泛的重视和深入的研究。
无刷直流电机在不同运行状态下的转速不同,对无位置传感器位置检测要求也不同。为了满足不同转速下转子位置的检测要求,无位置传感器转子位置检测技术主要有基于电机反电动势的检测法和信号注入法两大类[7]。本文对目前常用无位置传感器位置检测技术的原理与优缺点进行总结与归纳,以便为无刷直流电机的发展和应用提供技术支撑。
1 无刷直流电机数学模型
无刷直流电机基本控制方法有两相导通和三相导通两种。电机以三相导通方式运行时,理论上会产生转矩脉动。但是若以两相导通方式运行,输入恒定功率后就能获得稳定的电磁转矩。因此,通常采用两相导通方式[8]。两相导通方式下,无刷直流电机拓扑结构如图1 所示。

图1 无刷直流电机拓扑结构Fig.1 Topology structure of brushless DC motor
设流入电机定子绕组的电流方向为正,R、L分别为电机定子绕组一相的电阻、自感与互感之差。定子绕组三相相电压平衡方程为:
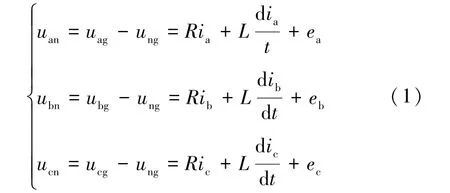
式中:uan、ubn、ucn为定子绕组三相相电压;uag、ubg、ucg为定子绕组端电压;ia、ib、ic为a、b、c 三相绕组相电流;ea、eb、ec为绕组瞬时反电动势;ung为电机中性点n对直流电源地端g 的电压。
2 基于电机反电动势的检测法
电机运行时产生的反电动势中包含转子的位置信息,因此可以利用电机反电动势实现转子位置的检测[9-10]。将电机非导通相的反电动势过零点延时30°,即可得到电机绕组的换相时刻[11]。
基于电机反电动势判断转子位置的方法主要有端电压法、线反电动势法、三次谐波法、滑模观测器检测法等。
两相导通时,无刷电机三相反电动势与相电流对应关系如图2 所示。

图2 三相反电动势与相电流对应关系Fig.2 Relationship between the three phase back EMFs and phase currents
2.1 端电压法
由于电机中性点无引出线,电机的三相相电压无法直接测量。电机端电压是指定子绕组三相输出端对直流电源地的电压,易于检测,因此通常用于获取反电动势。
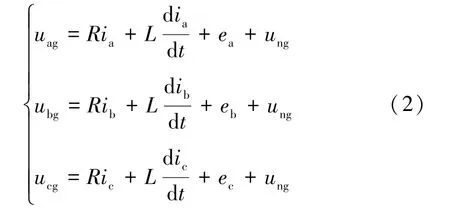
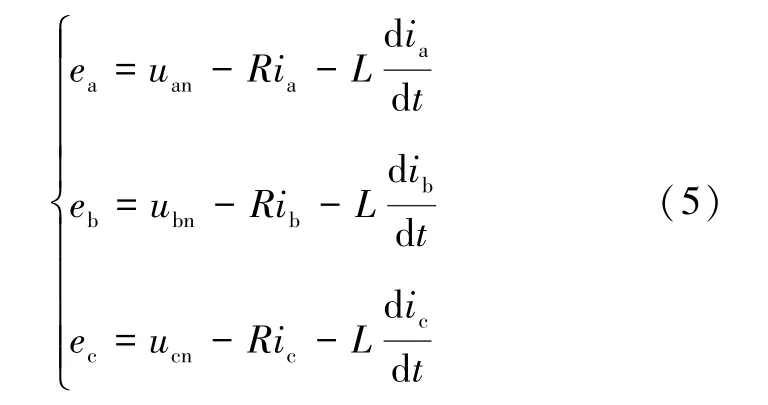
为便于分析,假设电机三相对称,三相定子绕组的自感与互感保持不变。因此,由式(1)可得:
当a 相与c 相绕组导通时,b 相反电动势与对应绕组端电压的关系为:

当a、c 相分别为非导通相时,各相反电动势为:
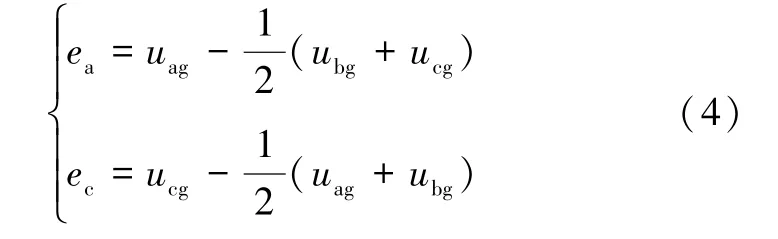
由式(4)可知,通过对电机非导通相端电压进行计算,即可判断出非导通相反电动势过零点的正确时间,进而求出正确的换相时间。通过式(3)和式(4),可正确得出一个周期内所有反电动势过零点时刻。
文献[12]利用电机端电压计算出转子位置,并试验验证了电机正常运行时端电压法的准确性。但是在电机转速较低时,相反电动势难以准确获取。为解决该问题,文献[13]提出一种新的计算方法,利用线电压差将检测到的电机绕组电压合成,实现低速运行时反电动势的提取。文献[14]中,对脉冲宽度进行脉冲宽度调制(pulse width modulation,PWM)。在每个开关管导通的120°电角度内选择在前30°和最后30°进行PWM,中间60°恒导通。这种脉冲调制方式称为PWM_ON_PWM 调制法。该方法能够有效抑制转矩脉动。文献[13]在利用线电压差检测反电势的基础上使用了上述脉冲调制方式,使控制方法具有明显的优势。文献[15]提出增加单端初级电感变换器(single-ended primary industry converter,SEPIC)前级驱动电路。基于SEPIC 的驱动电路拓扑如图3 所示。该设计只需检测一路相电压,便可实现对反电动势的检测,简化了检测电路。

图3 基于SEPIC 的驱动电路拓扑图Fig.3 Drive circuit topology based on SEPIC
综合上述文献的方法,经改进后的端电压检测法能够较好地检测出转子位置信息,且原理与硬件结构较为简单,易于实现。
2.2 线反电动势法
依据线电压的定义方法,在反电动势的基础上引出了线反电动势的概念。由式(1)变换得:
则线反电动势方程为:

式中:uab、ubc、uca为电机三相线电压。
由式(6)可得梯形波反电动势与线反电动势对应波形,如图4 所示。线反电动势过零点与非导通相梯形波反电势过零点相差30°,即可确定电机定子绕组换相时刻。

图4 梯形波反电动势与线反电动势对应波形图Fig.4 Corresponding waveform diagram of trapezoidal wave back EMF and line back EMF
文献[16]在分析出忽略微分计算并不影响对反电动势过零点检测的基础上,将线反电动势近似为:

由式(7)可知,通过检测线电压与相电流便可获得线反电动势。该方法相比较传统反电动势法,所需参数更易于检测。文献[17]中,为了获得准确的线反电动势过零点时刻,在转速控制的基础上添加电流闭环控制,搭建出一种更为简易的仿真模型,并通过与带有霍尔传感器的检测结果相比较,验证了该模型的准确性。对于大功率高速运行的无刷直流电机,需要通过深度滤波解决电磁干扰太大引起的问题。而深度滤波器导致了相移严重,使得换相偏差较大。在文献[18]中,针对相移问题,在传统的“90-α”换相策略的基础上增加“150-α”,提出新型信号补偿策略,为无刷直流电机高速运行时的误差补偿提供了方法,具有较高的参考价值。
由上述文献可知,线电压法能够在一定程度上简化检测电路,提高转子位置检测的准确度。同时,该方法针对大功率无刷直流电机的误差问题提供了补偿策略。
2.3 三次谐波法
傅里叶变换能够将由电机运行产生的反电动势分解为易于分析的频域信号,分解出的高次谐波中只含有奇次谐波,且随着谐波次数的增大含量逐渐减小[19]。大多数无刷直流电机未预留中性线,而三次谐波信号的提取需要利用定子绕组中点才能够实现。因此,文献[20]利用星形电阻网络的中点构建虚拟中心点,以代替定子绕组中点。带有虚拟中性点的电机模型如图5 所示。

图5 带有虚拟中性点的电机模型Fig.5 Motor model with virtual neutral point
三相反电动势经傅里叶分解,得:
将式(8)左右两端分别相加,得:
则三次谐波测量公式umo为:

将式(12)中的高次谐波滤除,便可以得到三次谐波。电机反电动势与谐波电动势对应关系如图6所示。
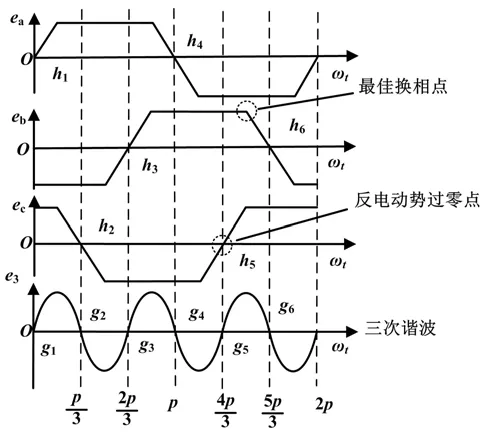
图6 电机反电动势与谐波电动势对应关系Fig.6 Relationship between motor back EMF and harmonic EMF
当三次谐波反电动势过零点时,非导通相梯形波反电动势同时过零点。
采用文献[21]中的方法得出的三次谐波,其幅值是普通反电动势幅值的三倍,有效拓展了无位置传感器转子位置检测技术的操作范围,尤其是电机反电动势幅值较小的低速时刻。同时,该方法能够用于非理想波形的反电动势的电机。
由分析可知,相较于端电压检测法,三次谐波检测法能够产生幅值较大的谐波,更易于检测。同时,高次谐波滤波器较为成熟,为三次谐波的拓展使用奠定了较好的基础。
2.4 滑模观测器检测法
基于滑模观测器检测转子位置的方法因结构简单而被广泛使用[21-23]。滑模观测器的控制原理为:按照设计的观测器,观测值从切换面外滑至换面内;观测值在高频约束条件下,沿着切换平面至系统平衡点[24]。
典型滑模观测器控制系统如图7 所示。

图7 典型滑模观测器控制系统Fig.7 Typical sliding mode observer control system
在控制系统中:通过构建观测器代替传统的硬件电路检测转子位置的方法;通过观测反电动势状态确定转子位置。
传统的滑模观测器因为需要频繁切换符号函数,系统的抖振现象较为明显。文献[21]提出全局快速终端滑模观测器。系统将两种滑模观测器相结合得到的高阶滑模观测器,能够有效抑制系统抖动,并且能够在较短的时间内收敛系统状态。然而系统能够快速收敛至稳定状态的同时,系统算法的复杂程度也随之上升。因此,该系统需要运算速度与精度更高级的芯片实现控制,使得硬件设计的成本增加。文献[25]提出构建新型的切换函数代替传统的符号函数,并建立基于自适应算法的模型来估算转速,削弱了纹波对系统的影响,免去了滤波器和相位补偿,能够获得平滑的线反电动势观测值。文献[26]与文献[27]通过分数阶观测器达到减少抖振和降低相位滞后的目的。分数阶传递能量缓慢,是该设计能够达到减振的主要理论基础。然而能量传递缓慢必定会带来系统响应迟缓的问题。因此,该方法在实际应用中的使用效果还需研究。
3 基于信号注入检测法
无位置传感器无刷直流电机静止时,反电动势为零,基于反电动势的位置检测方法无法使用。因此,需要采用其他检测方法来检测电机转子的初始位置。信号注入检测法主要分为两类:一是依据定子铁心饱和效应来确定转子的初始位置;二是采用注入高频电信号连续观测瞬时转矩的方法[28]。
3.1 定子铁心饱和效应
短时脉冲电压注入法依据定子铁心饱和效应实现。定子铁心饱和效应的基本内容为:当有外加磁场作用于带有铁心的电感时,电感的大小随着外加磁场的变化而变化。当定子绕组中流过的电流产生的磁场方向与转子永磁体磁场方向一致时,绕组的电感值L变小,反之则增大。转子永磁体位置与定子电感对应关系如图8 所示。
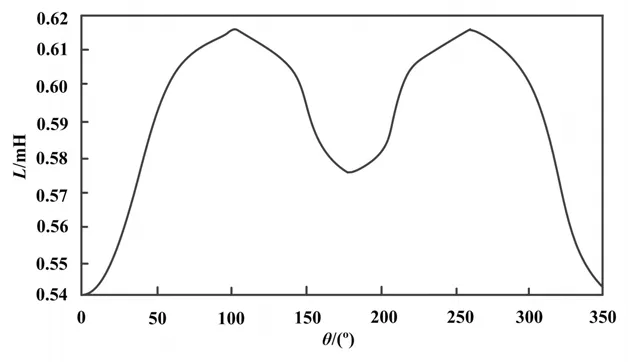
图8 转子永磁体位置与定子电感对应关系Fig.8 Relationship between rotor permanent magnet position and stator inductance
当定子绕组内注入大小相等、方向不同的电压矢量时,定子绕组合成的电流矢量不同。当电机中注入的电压矢量方向与转子N 极方向一致,对应的电机绕组电感值最小,电流上升最快,绕组中电流最大。同一绕组电感不同时的电流响应如图9 所示。
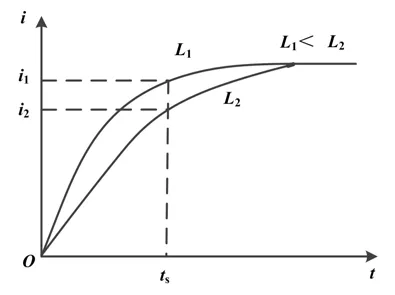
图9 同一绕组电感不同时的电流响应Fig.9 Current response of the same winding with different inductances
文献[29]提出:利用检测定子电感的大小的方式计算转子初始位置,通过在电路中添加电流传感器检测母线电流,再计算得出定子电感的大小。该方法计算出的转子位置可控制在60°的误差范围内。文献[30]与文献[31]分析了无刷直流电机两两导通的情况下,在给电机绕组施加电压矢量的过程中,定子绕组未导通时电感变化规律,如图10 所示。
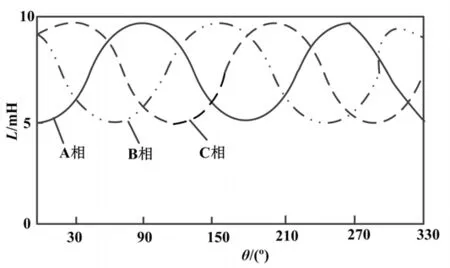
图10 定子绕组未导通时电感变化规律Fig.10 The law of inductance change when the stator winding is not conducting
文献[31]提出,通过向电机中注入电压矢量并检测端电压的变化情况,从而计算出转子位置的方法。该方法与文献[29]所述方法相比,向电机中注入的矢量个数较少且不用在硬件结构上借助电流传感器,能够降低成本,有利于实际应用。文献[32]基于短时脉冲注入法,通过PWM 调制信号控制矢量注入的频率,能够使估算精度达到15°;提出中高频起动方法,可有效改善电机起动困难的问题。
定子铁心饱和效应常用于电机起动方法中的三段式起动中,不但可以在预定位中提供转子的初始位置,还可以在电机处于低速起动时,为电机加速提供有效信息。
3.2 高频信号注入法
高频信号注入法基本原理为:将电压信号注入电机并检测电机中相应的电流,从而计算转子位置[33-34]。
高频电压信号注入法控制框图如图11 所示。

图11 高频电压信号注入法控制框图Fig.11 Control block diagram of high frequency voltage signal injection method
高频信号注入法依据注入的信号,分为旋转高频电压信号和脉动电压信号。
旋转高频电压信号注入法基本原理为:将一组电压矢量经处理后,与电机的基波分量相加,进行坐标转换后,得出电机的电流相应表达式;该表达式中的相角包含有转子位置信息,从而得到转子位置。脉动高频电压信号注入法首先进行坐标变换,将静止坐标系中的脉动电压信号注入到d-q旋转坐标系,计算得到q轴的高频电流信号;对该信号分析后,可得转子的位置与速度[35]。
高频信号注入法已经被应用在永磁同步电机中,以检测转子位置。其中,旋转高频注入法对电机凸极率要求较大,因此多用于永磁同步电机或者是凸极无刷直流电机。然而,脉动高频信号注入法对凸极率要求较低,可用于隐极式无刷直流电机。在此基础上,文献[36]建立无刷直流电机高频信号注入的模型。文献[37]构建瞬时转矩观测器。该观测器能够观测转子位置角,结合电机其他的物理量可以得出转矩观测值,从而实现电机低速运行和从静止状态开始的起动。
目前公开的文献中,对于无刷直流电机高频注入法检测转子位置的研究并不多。但应用于永磁同步电机的仿真与试验已证实该方法的准确性。由此可见,该方法应用于无刷直流电机是具有可行性的。
4 结论
无刷直流电机无位置传感器的位置检测技术,主要基于电机的反电动势信号、电机的定子铁心饱和效应以及高频信号注入等方法实现。基于反电动势信号的方法使用较为广泛,且在电机高速运行时更为精确。然而,反电动势检测需要一定的速度基础,需要额外增加起动控制部分。在电机静止和低速运行时,反电动势信号检测困难。当无法确定转子位置时,高频信号注入法能够在一定程度上解决该问题。但是高频信号注入法对电机凸极性要求较高,且在电机高速运行时,该方法所测结果容易受到干扰,产生较大的误差。
通过对无位置传感器转子位置检测发展历程的研究,该检测方法可能具有以下发展趋势:一是研究可靠的复合位置检测方法,将反电动势检测法与信号注入法相结合,扬长避短;二是信号注入法实现较为困难,尤其是高频信号注入法应用于无刷直流电机转子位置检测还需要进一步探索;三是电机由低速运行切换到高速运行的过程仍具有较大的难度,需要深入研究。
猜你喜欢
大电机技术(2022年5期)2022-11-17
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
电子制作(2017年1期)2017-05-17
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
电测与仪表(2014年11期)2014-04-04
