
擦窗机无约束系统工况要求分析及应用
2021-09-04 14:01兰阳春
建筑机械化 2021年8期
兰阳春,沙 赛
(上海普英特高层设备股份有限公司,上海 200127)
擦窗机主要用于建筑物及构筑物的幕墙、窗户的清洗及维护,由于存在风作用力,可能使吊船产生相对建筑立面(横向)或与建筑立面平行方向(纵向)的不可控摆动,例如2015 年上海环球金融中心擦窗机吊船撞击91 层幕墙事故。通常情况下,建筑物会设置吊船约束系统,且最底部的约束层距离自然地平面不大于40m,在高于地平面40m 以上的部分,每间隔20m 需在建筑物上设置一个约束点,来保证擦窗机工作的安全性,但也存在建筑物没有设置约束系统的情况。
本文依托工程案例位于上海市某楼宇(总高250m),针对该楼宇擦窗机无约束系统适用工况进行分析。
1 典型擦窗机组成及工作原理简介
屋面轨道式擦窗机主要组成部分如图1。擦窗机通过行走机构在轨道上行走、主臂回转机构及臂头回转机构的回转,到建筑物各个立面,操作者在吊船内通过起升机构带动吊船的上升和下降,对建筑物进行清洗和维护。

图1 擦窗机组成
2 擦窗机无约束系统工况要求
依据GB/T 19154-2017《擦窗机》设定在无约束系统的情况下,使用擦窗机工作需满足以下条件。
1)吊船相对于建筑立面的横向摆动水平位移不大于4m。
2)吊船相对于建筑立面的纵向摆动不大于吊船自身长度的40%,如图2。
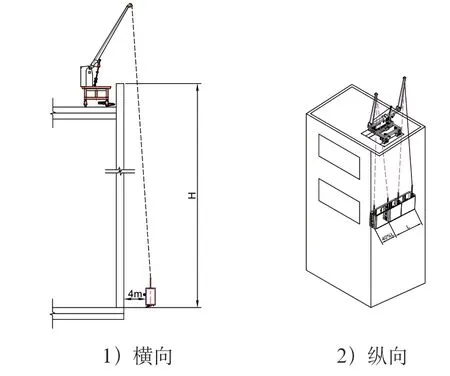
图2 吊船与建筑相对位置
3)每一个操作人可施加的水平作用力不大于200N。
4)吊船上安装带有声讯报警器的风速测量装置,擦窗机工作过程中持续测量风速,且当风速达到无约束系统可工作风速的75%时,报警器报警。
2.1 吊船横向位移最大允许风速计算
如图3,吊船横向位移允许工作风速为
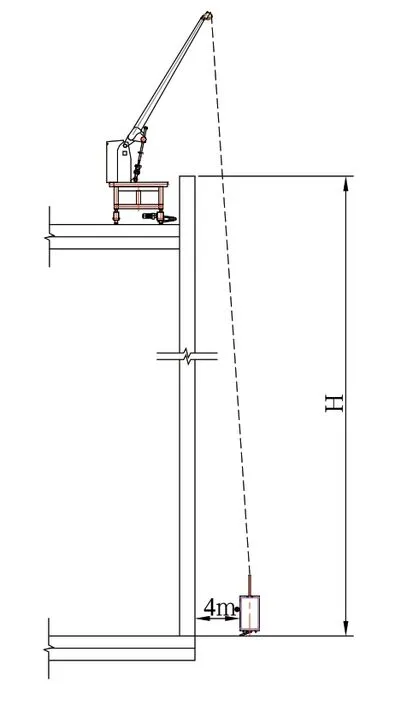
图3 吊船横向位移(相对立面)示意图

式中v1——吊船横向位移允许工作风速,m/s;
Fw1——吊船横向位移允许施加的水平作用力,且Fw1≤400N;
C——风力系数;
A1——吊船横向总迎风面积,m2。
吊船横向位移允许施加的水平作用力

式中α——吊船横向位移工作钢丝绳偏摆角;
Tsl——总悬挂载荷,kg。
吊船横向位移4m,工作钢丝绳偏摆角度按式(3)计算

式中H——最大工作高度(m)。
把式(3)计算得到的tanα代入式(2)可计算出吊船横向位移允许施加的水平作用力Fw1,且Fw1应满足吊船中2 人可以操作此作用力,2 人可以操作的最大作用力为400N,即Fw1≤400N,当Fw1>400N时,则按400N作为最大水平作用力。
综上,可计算出无约束系统的吊船,考虑最大横向摆动时,最大允许风速v1。
2.2 吊船纵向位移最大允许风速计算
如图4,吊船纵向位移允许工作风速为

图4 吊船纵向位移(平行立面)示意图

式中v2——吊船纵向位移允许工作风速,m/s;
Fw2——吊船纵向位移允许施加水平作用力,N;
C——风力系数;
A2——吊船纵向总迎风面积,m2。吊船纵向位移允许施加的水平作用力

式中β——吊船纵向位移钢丝绳偏摆角。
吊船纵向位移吊船长度40%,钢丝绳偏摆角度为

吊船纵向位移允许施加的水平作用力Fw2应满足吊船中2 人可以操作此作用力,2 人可以操作的最大作用力为400N,即Fw2≤400N,当Fw2>400N 时,则按400N 作为最大水平作用力。
综上可计算出无约束系统的吊船,考虑最大横向摆动时,最大允许风速v2。
对比横向最大允许风速为v1、纵向最大允许风速为v2及GB/T 19154-2017 中规定擦窗机允许工作的最大风速8.3m/s,取三者中的最小值作为无约束系统的吊船的最大允许风速vy。
3 吊船内风速声讯报警器报警值
建筑物未安装吊船约束系统时,擦窗机的使用应限制在特定的风速条件下,并且吊船内达到预设最大工作风速75%时声讯报警器应启动。
吊船内风速声讯报警器报警值按式(7)计算

式中vb——吊船风速声讯报警器报警值,m/s;
vy——无约束系统吊船,最大允许工作风速,m/s。
4 结语
擦窗机吊船在工作过程中,时刻会受到风载荷的作用,在无约束系统的情况下进行工作,一旦风速超过一定值,将会引起严重的后果,所以在工作过程中,如果楼宇没有配备约束系统,必须限定风速工作条件,确保工作过程的安全。
通过本文所述的方法,对擦窗机无约束系统的工作条件限定最大允许风速,且在吊船内设风速声讯报警器,设定好声讯报警器的报警值,能够大幅提高无约束系统情况下工作的安全性。
猜你喜欢
海洋通报(2020年5期)2021-01-14
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
电子制作(2018年2期)2018-04-18
电子制作(2017年24期)2017-02-02
中学生数理化·高三版(2016年2期)2016-09-10
西南交通大学学报(2016年4期)2016-06-15
中学生数理化·高二版(2016年6期)2016-05-14
科学中国人(2016年35期)2016-01-28
西藏科技(2015年2期)2015-09-26
电测与仪表(2015年8期)2015-04-09
