
基于EtherCAT总线的轻量型爬壁机器人系统*
2021-09-04 06:22张浩曹立超周勇刘晓光蒋晓明
自动化与信息工程 2021年4期
张浩 曹立超 周勇 刘晓光 蒋晓明
学术研究
基于EtherCAT总线的轻量型爬壁机器人系统*
张浩 曹立超 周勇 刘晓光 蒋晓明
(广东省科学院智能制造研究所,广东 广州 510070)
为解决当前大型钢结构件的特种作业人工依赖性高、作业环境差和效率低等问题,设计一种基于EtherCAT总线的轻量型爬壁机器人系统。首先,介绍爬壁机器人系统需求与方案;然后,给出设计爬壁机器人系统硬件和软件;接着,阐述机器人搭载不同工具可用于不同作业任务;最后,经测试验证,该机器人系统功能达到了预期目标。
轮式爬壁机器人;轻量型;磁吸附;控制系统;EtherCAT总线
0 引言
在工业4.0大环境下,人们对提高自动化水平、减轻劳动力依赖和提高生产效率的需求日趋强烈。当前大型船舶、石化储罐和风电塔筒等大型钢结构件的清洗、检测和焊接等作业,很大程度上依赖于人工操作,作业环境差、风险高[1-2]。利用机器人完成这类危险工作是大势所趋,于是针对该类特种行业的爬壁机器人应运而生[3]。区别于地面的常规轮式移动机器人,轮式爬壁机器人借助磁力吸附在导磁性材料上,作业时无需事先铺设爬行轨道,通过摄像头等传感器信息的辅助,可实现大型钢结构件的全位置爬行作业[4]。轮式爬壁机器人不仅具有轮式移动机构的稳定性和灵活性,而且不需要额外的转向机构,仅通过改变两侧主动轮速度差即可实现不同半径的转弯。该机器人结构简单、运动高效、成本低廉[5]。
1 系统需求与方案
1.1 爬壁机器人本体需求
考虑到吸附的稳定性,爬壁机器人采用四轮结构方式,吸附力作用于机器人4个角,相比于两轮和三轮结构的爬壁机器人,稳定性更好;同时考虑到运输和携带的便利性,爬壁机器人需轻量化和小型化设计,主要设计参数如下:1)整体尺寸为340 mm×230 mm×150 mm;2)最大的行走速度为25 mm/s;3)自重为15 kg。
爬壁机器人依赖4个磁轮上的磁性材料附着在导磁性结构件上[6]。磁性材料采用内嵌于钢轮的方式,可有效克服永磁体脆性大,受力易折断的缺点。相比于地面的轮式移动机器人,爬壁机器人要克服磁轮额外施加的磁力进行作业,需要更大的力矩输出[7-8]。考虑到爬壁机器人尺寸及自重,利用力矩伺服电机配合谐波减速机输出动力。
1.2 控制系统需求
控制系统作为爬壁机器人的重要组成部分,对其各项功能进行有效控制,如行走、转向等;还与操作者实现良好交互,具有更好的用户操作体验[9]。
根据工作场景及任务需求,当前爬壁机器人的控制方式多为有线控制,其尾部常常拖拽一束线缆,用于电源供应和通讯[10-11]。这些线缆对机器人产生较大的拖拽力,限制机器人的运动范围,降低作业效率;同时相邻线缆之间可能相互影响,形成电磁干扰,影响控制系统的稳定性[12-13]。为此,本文控制系统采用总线方式,减少爬壁机器人尾部线缆的数量,提高控制系统的稳定性和灵活性,且具有较好的可扩展性。
为降低控制系统复杂度,提高可靠性,爬壁机器人通过控制两侧车轮的速度差来实现转向。速度差越大,转弯半径越小,操作灵活性越好[14]。但转弯半径不能过小,否则需要提供较大的转向动力[15-16],增加车轮与附着面之间的摩擦时间,加大车轮和附着面的磨损,增加功耗[17]。因此,控制系统需要设置阈值,对最小转弯半径进行限制。
基于以上分析,爬壁机器人控制系统的主要需求如下:
1)实现爬壁机器人基本运动功能,包括直线行走、转弯等;
2)实现无级调速及在线变速功能;
3)采用总线控制方式;
4)具有较好的可扩展性,便于其他设备接入。
1.3 系统方案
根据以上需求分析,基于EtherCAT总线的轻量型爬壁机器人系统整体方案如图1所示。

图1 基于EtherCAT总线的轻量型爬壁机器人系统整体方案
整个系统由机器人控制柜和机器人本体2部分组成。其中机器人控制柜分为电源、上位机控制器和下位机运动控制器3部分;机器人本体由4个伺服电机驱动器及其他I/O模块组成,机器人控制柜提供电源并下达控制命令。
为减少布线并防止布线可能带来的信号干扰问题,同时增强系统的可扩展性,爬壁机器人控制系统采用EtherCAT总线方式。下位机运动控制器作为EtherCAT主站,安装在控制柜内;4个伺服电机驱动器及其他I/O模块作为从站,安装在机器人本体内;主站和从站之间通过EtherCAT通讯线缆进行通讯。当机器人功能扩展要添加额外的轴时,只需在最后一个从站用网线连接新加入的从站并进行相应的参数配置即可。
2 系统硬件设计
爬壁机器人作为移动载体,考虑其运动灵活性及运输方便,尺寸不宜过大。因此在设计和选择系统硬件时,在满足性能和经济因素的前提下,选择更小尺寸的设备。
2.1 下位机硬件设计
下位机硬件主要包括下位机运动控制器和4个驱动模组,驱动模组如图2所示。下位机运动控制器用于控制爬壁机器人的4个伺服电机协调运行,进而控制其在壁面稳定爬行,实施各种作业任务,下位机结构图如图3所示。
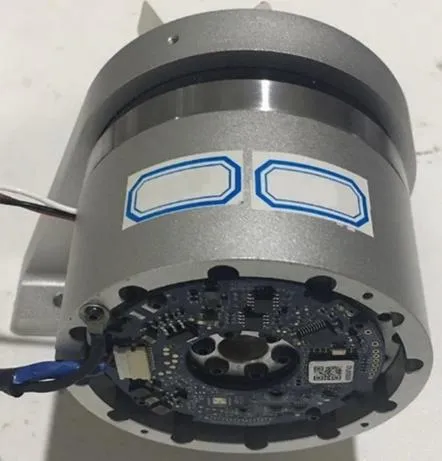
图2 驱动模组

图3 下位机结构图
2.2 上位机硬件设计
上位机主要用于用户与爬壁机器人控制系统进行交互和配置控制系统参数,同时发出控制指令并监控下位机运行状态。上位机主要包括工控主机、显示器及其他外设。
3 系统软件设计
爬壁机器人系统软件主要包括上位机控制软件和下位机控制软件。
上位机控制软件主要功能模块包括:通信、状态显示、机器人运动控制、焊缝跟踪、除锈、报警和急停等,控制界面如图4所示。

图4 上位机控制界面
下位机和各驱动器之间是主站和从站的关系,下位机控制软件的控制流程图如图5所示。

图5 下位机软件控制流程
首先,控制系统上电并运行初始化程序;然后,运行EtherCAT通讯程序,确认总线状态是否正常,若不正常则软件异常报警,操作人员进行异常情况处理,直到总线状态正常;接着,运行轴状态机检测程序,确保各轴的参数处于正常范围,可进行伺服驱动使能操作,若不正常则软件异常报警,操作人员进行异常情况处理,直到各轴状态机正常;最后,上位机下达控制命令,如直线行走、转弯等。
4 基于移动平台的机器人系统集成
爬壁机器人系统构成如图6所示。该系统作为一个通用型的移动平台,结合不同的作业工具,可设计成适应不同环境和任务的特种机器人系统,如搭载轻型的多轴机械臂,用于壁面复杂空间作业任务,如图7所示;搭载超高压水除锈工具,用于船舶等大型钢结构件的除锈作业,如图8所示;搭载焊缝传感器,用于大型钢结构件的自动化焊接作业,如图9所示。
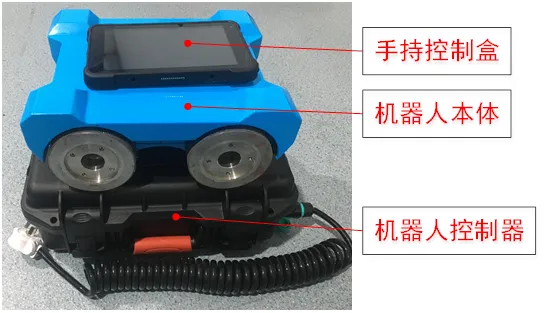
图6 爬壁机器人系统构成
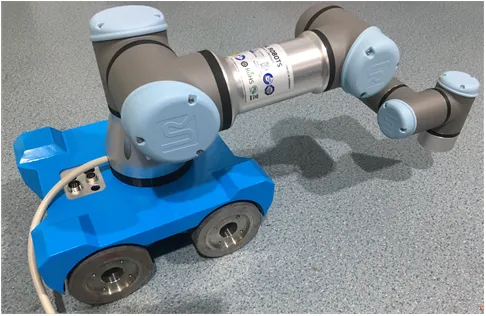
图7 爬壁机器人+6轴机械臂
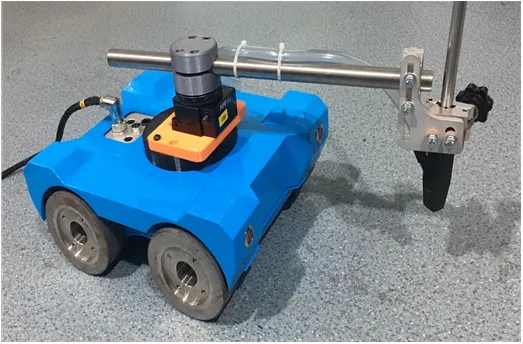
图8 爬壁机器人+摆臂

图9 爬壁机器人+焊接滑台
5 实验与结论
一般情况下,电机本身电流大小和输出扭矩呈线性关系,电流大小直接反映爬壁机器人的负载和所需功耗[18-19]。对爬壁机器人系统进行功能测试。首先,测试转弯功能,获得转弯半径与系统实际电流关系图;其次,测试3种极限状态,包括竖直往上行走、左右方向行走、竖直往下行走时系统电流的大小,获得这3种状态下的爬壁机器人运行速度与电流关系图。
在实验室搭建一处钢结构壁面,钢板厚度8 mm,并分为A,B,C 3个区域。其中区域A是一块3 m×5 m的垂直钢板,实验在该区域进行;区域B是一块约四分之一圆柱的曲面钢板,用于爬壁机器人从地面过渡到钢板;区域C固定在地面,用于支撑上述2块钢板,如图10所示。
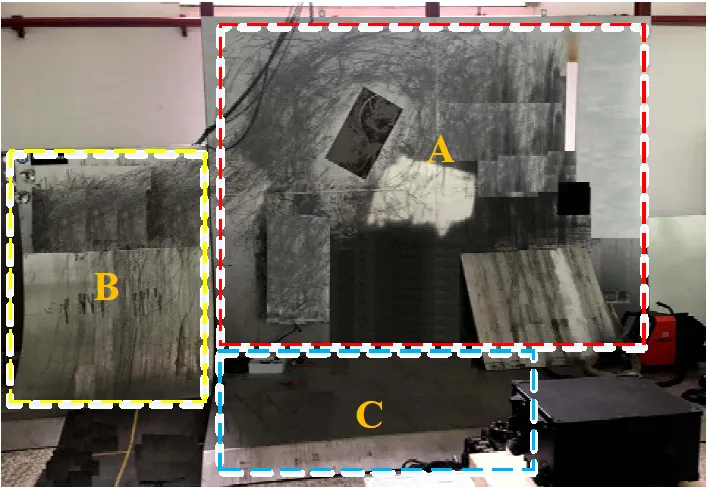
图10 实验场地
5.1 转弯功能测试
通过设定两侧车轮不同的速度差,测试爬壁机器人在不同转弯半径下的转弯功能,并采集相应的电流数据,如图11所示。

图11 转弯功能测试下总电流和转弯半径关系图
由图11可知:爬壁机器人在转弯半径最小处的电流值处于允许范围6A内;且未出现转弯困难的情况。
5.2 极限状态测试
机器人在不同速度下进行竖直往上行走、竖直往下行走、左右方向行走3种极限状态测试,并采集相应的电流数据,如图12所示。
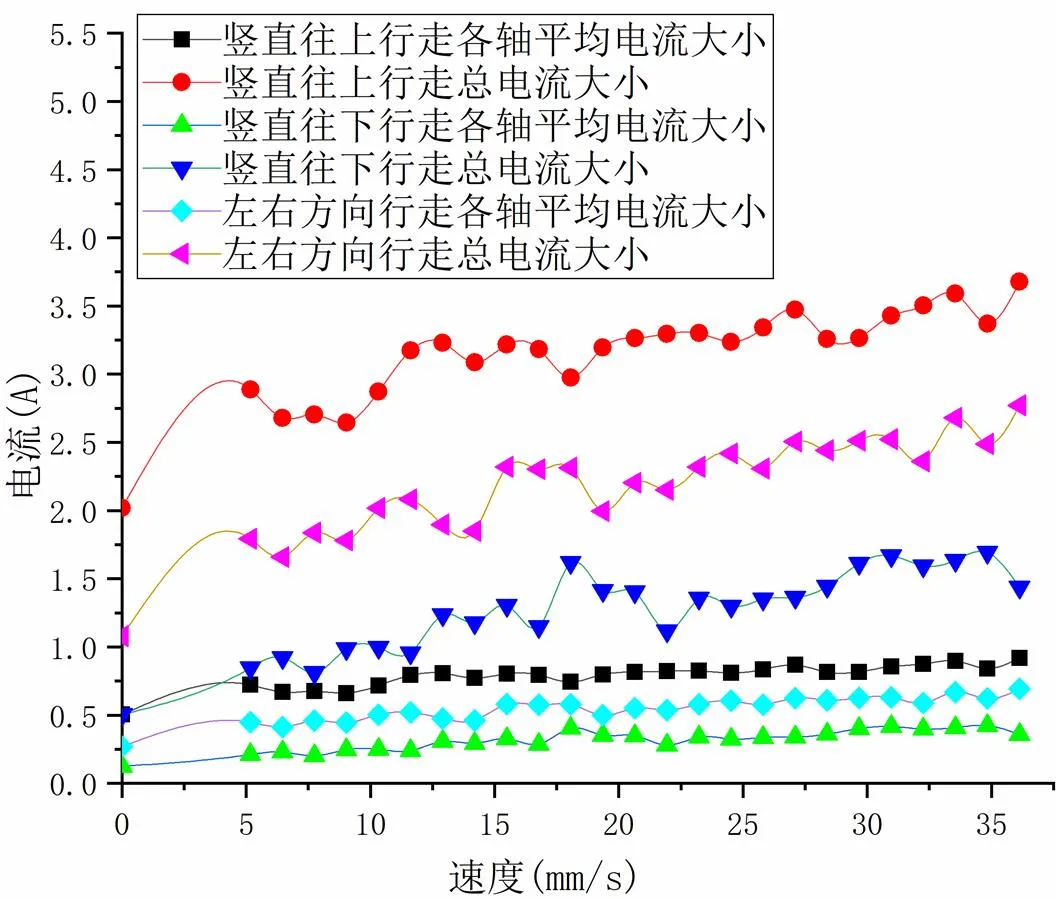
图12 3种极限状态下电流与速度关系图
由图12可知:竖直往上行走时各轴电流及系统总电流比其他2种情况大,此时工况最恶劣;竖直往下行走时的工况最好。
5.3 实验结论
由图12可知:随着爬行速度加快,爬壁机器人各轴平均电流和总电流均缓慢增大;其中,竖直往上行走时各轴平均电流和总电流最大,此时机器人总电流低于4 A;竖直往下行走时各轴平均电流和总电流最小;转弯最大电流出现在转弯半径为151 mm时,低于4.5 A,以上3种极限状态下的电流均在驱动器允许范围6 A内。
由图11可知,转弯半径大于150 mm可调;由图12可知,机器人直线行走速度在0 mm/s~35 mm/s时,可实现无级调速。
6 结语
本文基于EtherCAT总线设计轻量型爬壁机器人系统。经测试验证,爬壁机器人系统运行良好,在低速、中速和高速时均能稳定爬行,达到预计设计指标,能够保证扫查、探伤等作业的效率和质量。
[1] 陈光明,黄旋.基于高压水射流的船体清洗机器人关键技术分析[J].流体机械,2019,47(9):56-62.
[2] 郜海超,韩海敏,陈会涛,等.针对风电机维护任务的爬壁机器人设计与研究[J].机床与液压,2018,46(9):13-16.
[3] 田兰图.油罐检测爬壁机器人技术及系统研究[D].北京:清华大学,2004.
[4] 周勇,刘晓光,蒋晓明,等.面向大型结构件智能焊接的爬壁机器人系统[J].自动化与信息工程,2019,40(3):1-5.
[5] ZHAI L, DONG S. Electronic differential speed steering control for four in-wheel motors independent drive vehicle[C]// 2011 9th World Congress on Intelligent Control and Automation. IEEE, 2011: 780-783.
[6] 王维鹏,高春艳,张小俊,等.轻量化爬壁机器人永磁吸附特性分析与仿真[J].制造业自动化,2020,42(12):23-27.
[7] 门小东. 基于关节力矩估计的可重构机器人分散交互控制研究[D].长春:长春工业大学,2021.
[8] 常睿,樊建春,张来斌.爬壁机器人磁轮特性研究及其运动仿真[J].石油机械,2020,48(1):124-131.
[9] 孙烨.具有壁面过渡功能的爬壁机器人控制系统研究[D].南京:南京林业大学,2020.
[10] 黄逢.球罐外部焊缝检测机器人系统的设计[D].南京:东南大学,2019.
[11] 李帅先.钢面墙表面作业机器人控制系统的设计[D].重庆:重庆交通大学,2018.
[12] 陈正磊.基于电磁兼容特性及影响因素分析动车布线策略[J].中国科技信息,2021(6):102-103.
[13] 化麒,李艳红,许冲.电子仪器电磁干扰问题探究[J].电子元器件与信息技术,2021,5(2):11-12.
[14] 熊雕.船舶爬壁机器人力学分析及运动控制研究[D].舟山:浙江海洋学院,2015.
[15] 徐泽亮,马培荪.永磁吸附履带式爬壁机器人转向运动灵活性分析[J].上海交通大学学报,2003(S2):58-61,65.
[16] 王新海.基于四轮驱动永磁吸附爬壁机器人的设计与研究[D].南昌:南昌大学,2018.
[17] 唐东林,龙再勇,袁波,等.永磁吸附轮式爬壁机器人受力及功耗分析[J].机械科学与技术,2019,38(4):499-506.
[18] 方毅.永磁吸附爬壁机器人设计及性能分析[D].武汉:武汉科技大学,2015.
[19] 周依霖,张华,叶艳辉,等.永磁吸附履带式爬壁机器人转向动力特性分析[J].机械设计,2017,34(2):56-61.
Lightweight Wall-Climbing Robot System Based on EtherCAT Bus
Zhang Hao Cao Lichao Zhou Yong Liu Xiaoguang Jiang Xiaoming
(Institute of Intelligent Manufacturing, GDAS, Guangzhou 510070, China)
In order to solve the problems of high manual dependence, poor working environment and low efficiency of special operation of large steel structures, a lightweight wall-climbing robot system based on EtherCAT bus is designed. Firstly, the requirements and schemes of wall-climbing robot system are introduced; Then, the hardware and software of the wall-climbing robot system are given; Then, it expounds that the robot can be used for different tasks with different tools; Finally, the test shows that the function of the robot system has achieved the expected goal.
wheel wall-climbing robot; lightweight; magnetic adsorption; control system; EtherCAT bus
张浩,男,1993年生,硕士研究生,主要研究方向:机器人与自动化。E-mail: h.zhang@giim.ac.cn
曹立超,男,1990年生,硕士研究生,主要研究方向:机器人设计与自动化。E-mail: lc.cao@giim.ac.cn
周勇,男,1991年生,硕士研究生,主要研究方向:计算机视觉。E-mail: y.zhou@giim.ac.cn
刘晓光,男,1980年生,硕士研究生,主要研究方向:机器人焊接技术。E-mail: xg.liu@giim.ac.cn
蒋晓明,男,1973年生,博士研究生,主要研究方向:电力电子、数控技术与自动化。E-mail: xm.jiang@giim.ac.cn
TP249
A
1674-2605(2021)04-0002-05
10.3969/j.issn.1674-2605.2021.04.002
基金项目:广东省科技计划项目(2020B090928002);广东省海洋经济专项项目(GDNRC[2021]024)。
猜你喜欢
力学学报(2022年6期)2022-07-10
机械工程师(2022年3期)2022-03-24
科技与创新(2018年1期)2018-12-23
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
现代工业经济和信息化(2016年2期)2016-05-17
广东石油化工学院学报(2016年6期)2016-05-17
北京纪事(2016年5期)2016-05-07
空间控制技术与应用(2015年2期)2015-06-05
电子设计工程(2015年8期)2015-02-27
