基于时频和功率谱密度的移栽机振动特性测试与分析
2021-09-04 12:01耿令新姬江涛
农业工程学报 2021年11期
耿令新,李 康,庞 靖,金 鑫,姬江涛
(河南科技大学农业装备工程学院,洛阳 471003)
0 引 言
农业机械作业时普遍存在振动剧烈现象[1-2],强烈的振动不仅易造成整机可靠性低及平均无故障作业时间短等问题,而且还影响操作员健康与舒适性[3-5],是制约国内外同类产品可靠性和舒适性发展的主要原因[6-8]。
鉴于此,国内外学者对农业机械装备已开展了相关研究,主要集中在振动测试分析[9-11]、模态分析与试验[12-14]、减振控制[15-17]、结构参数优化[18-20]等方面。李耀明等[21]通过对割台机架进行模态试验验证及理论分析,对机架进行结构优化与试验,有效避免了割台共振的产生。张佳喜等[22]研究了玉米起茬机构在工作时与田间随机激励的关系,可避免起茬装置共振的发生。Wout等[23]运用有限元分析软件获得了移栽机的模态参数,为移栽机的结构设计提供理论依据。姚艳春等[24]研究了玉米收获机割台动态振动特性极其影响规律,得出模态振型以弯曲和扭转为主以及影响割台振动的主要因素。
综上所述,国内在农业收获机械的振动测试与结构改进已取得相关研究成果,但针对农业栽植机械的振动问题,尤其是高速移栽机,研究相对较少。国内试验表明[25-26]:随着取苗速度的增加,机构变速转动或摆动会使构件冲击振动和惯性力明显增大,导致作业稳定性下降、取苗成功率下降、漏苗率增加等问题,这些问题目前都尚未有较好的解决方案。因此,本文以 2ZZT-2型顶夹式气动蔬菜移栽机为研究对象,对移栽机进行振动测试试验,利用时频和功率谱密度分析方法对不同工况下的时域信号进行分析,得到移栽机的主要振源和振动频率的分布特征,然后,运用锤击法试验,得到试验部件各测点的模态频率,并分析不同工况下各测点主要频率与该测点代表运动部件的前5阶固有频率之间的对应关系。以期为提高移栽机的可靠性以及进一步研究提供参考。
1 移栽机结构参数
该移栽机取苗装置主要由顶苗机构、取苗摆动装置、取苗机械手、苗盘输送装置等部分组成。该装置中的开合气缸、间隔气缸、摆动气缸、顶苗气缸和横移气缸分别实现取苗机械手的开合、取苗机械手间距的伸缩、取苗摆动装置运动、钵苗顶出以及苗盘的横移。其结构如图1所示,其主要性能参数如表1所示。工作时,顶苗气缸伸出,顶苗杆将钵苗顶出;然后取苗机械手的开合气缸动作,进行钵苗夹取; 摆动气缸缩回,成排取苗机械手夹持钵苗摆到投苗位置,与此同时,顶苗气缸缩回,横移气缸伸出,取苗机械手间隔气缸伸出,使取苗机械手到达投苗位置时,机械手之间的间距能与下方的导苗筒间距一致;摆到投苗位置后,当导苗筒喂入栽植装置钵苗数与取苗数相同时,取苗机械手开合气缸缩回,苗爪张开,进行投苗。

表1 移栽机主要性能参数Table 1 Main performance parameters of transplanter
2 移栽机振源分析
移栽机是一个有限多自由度的弹性系统,在各种激振力的作用下产生振动与变形[27]。当激振频率与移栽机某部件的固有频率相同时,该部件会产生强烈的共振现象,造成机器损坏[28-29]。移栽机正常工作时,取苗摆动装置和其他关键运动部件之间相互配合工作,振动的产生主要由气缸控制各部件突然运动所造成。其中取苗摆动装置的运动如图2所示。可以实现取苗机械手在取苗和投苗之间往复运动。
3 移栽机振动测试
3.1 振动测试原理
移栽机振动检测是通过 DH5902动态信号采集仪将安装在移栽机上的 3向加速度传感器采集到的振动信号传送到动态信号分析系统中,并对振动信号依次进行时频分析及功率谱密度分析。
3.2 试验设备及性能指标
移栽机振动测试系统主要由 3向加速度传感器、动态信号采集仪与信号分析系统、笔记本组成,如图3所示。其中 3向加速度传感器型号为 356A16、灵敏度为100.1 mV/g,量程范围为±50g;动态信号采集仪的通道数为20、采样带宽为16位100 kHz。
3.3 试验方案与测点布置
为了能准确反映该移栽机的振动特性,进行了预试验,预试验中选取测点1(苗盘输送装置支座)、测点2(滑轨底座)、测点3(取苗摆动装置支座)、测点4(取苗摆动装置挡板)、测点5(苗盘输送装置底座)、测点6(取苗机械手底部横梁)共6个测点和5种工况进行振动测试,具体布置方案如表2所示。
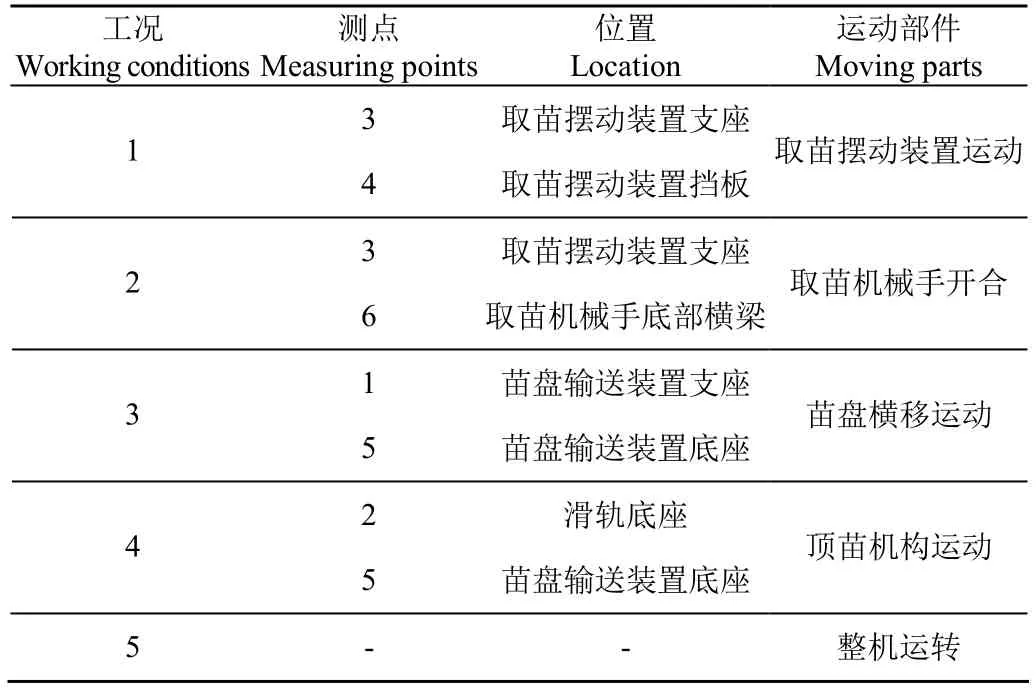
表2 测点及工况布置Table 2 Layout of measuring points and working conditions
为了能更加直观准确地确定最终测点的位置,把各测点的最大振幅进行比较(如图4所示),选择振幅较大的作为测点选择依据。从图4中可以看出测点1在X,Y,Z方向上的振动幅值都比测点5在3个方向上的幅值大,其中测点1在Z方向的振动幅值达到了21.25 m/s2;测点2在X,Y,Z方向上的振动幅值分别为0.29、0.26、0.21 m/s2,而测点5在3个方向上的最大幅值为0.23 m/s2;测点3在Y方向上的振幅为1.56 m/s2,而测点6在Y方向上振幅为0.65 m/s2;测点3在Y方向的振幅达到了18.32 m/s2,而测点4在Y方向上的振幅为21.2 m/s2。因此,本试验最终选取测点 1(苗盘输送装置支座)、测点 2(滑轨底座)、测点 3(取苗摆动装置支座)和测点 4(取苗摆动装置挡板)等4个测点作为本次振动试验测点布置。
3.4 振动信号采集
试验前将测点在对应位置进行标记,把传感器吸附在各测点处,将 3向加速度传感器、动态信号采集仪、动态信号分析处理软件连接好。在安装时将传感器 3个输出通道方向分别对应移栽机的前后、左右、上下 3个方向。为了保证测试波形准确性,在DHDAS5902动态信号分析系统中设置采样频率 5 kHz,采样方式为连续采样,开启15个通道,每次采样前进行通道平衡清零操作,设置完成后进行信号采集。不同工况下各测点的时域信号如图5所示。
4 结果与分析
4.1 振动特性时域分析
以振动加速度均方根值(RMS)作为衡量振动强度大小的依据,可较好地反应结构振幅与能量强度,其计算如式(1)所示。
式中xk为振动信号;N为试验次数。
不同工况下各测点振动加速度均方根如表3所示。
由表3可以看出:
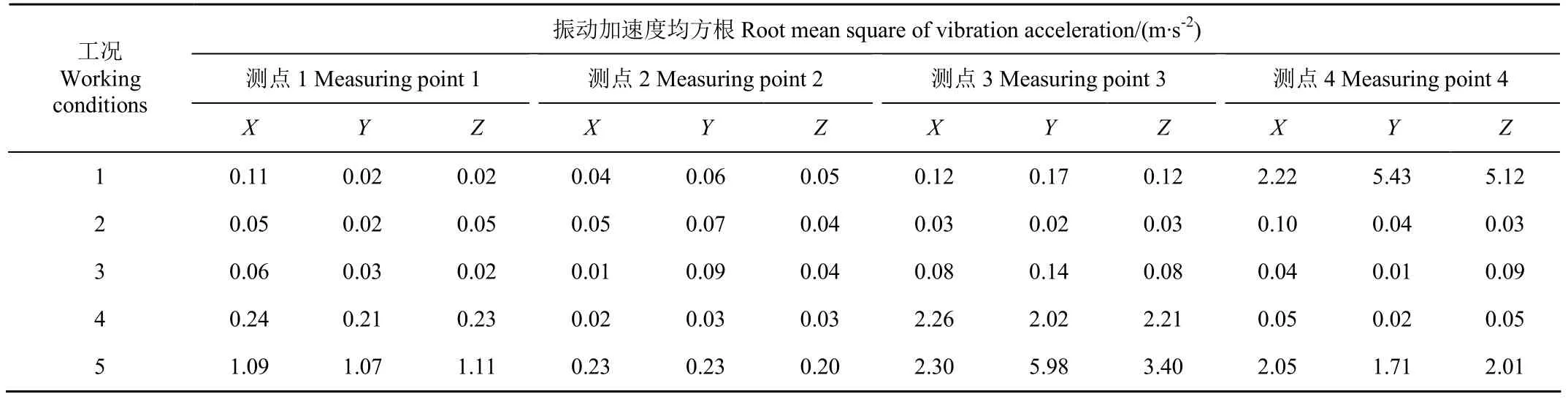
表3 不同工况下4个测点振动加速度均方根Table 3 RMS of vibration acceleration at four measuring points under different working conditions
1)苗盘输送装置支座测点1在前3种工况下的振动加速度均方根变化不大,说明前3种工况对测点1造成的振幅大小相当,最大为0.11 m/s2。而在工况4和工况5时,测点1在X,Y,Z方向振幅增加,工况5时振幅增加更为明显,在Z方向振幅达到了1.11 m/s2。
2)滑轨底座测点2在工况1~工况4下的振幅相近,最大为0.09 m/s2,说明前4种工况对测点2影响较小。整机运转工况5时,测点2在3个方向振幅明显增加,最大为0.23m/s2,说明整机运转相比其他部件运动对测点2影响更大。
3)取苗摆动装置支座测点3在工况1、工况2和工况3时的振幅较小,工况1和工况3下X,Y,Z方向上振动幅值相差不大,说明在工况1和工况3两种工作状态下引起取苗摆动装置支座的前后、左右、上下 3个方向上振动大小相当。而在工况4、工况5下振幅明显增加,在工况5时Y方向振幅达到最大为5.98 m/s2。
4)取苗摆动装置挡板测点 4在工况 2、3和工况 4下的振幅最大相差为0.04 m/s2,说明在3种工况下对取苗摆动装置挡板3个方向上的振幅相当。在工况1和工况5时3个方向上振幅增加显著,取苗摆动装置运动工况1在Y、Z方向上振幅分别为5.43和5.12 m/s2;工况5时在Y、Z方向分别为1.71和2.01 m/s2,相比工况1,工况5在Y、Z方向振幅分别下降了68.51%、60.74%左右,说明整机运转时,取苗摆动装置摆动在Y、Z方向上的振幅有所下降。
4.2 时频分析
传统的傅里叶变换适用平稳信号分析[30],由图5可知,本文试验测得的振动信号为非平稳信号。非平稳信号常用时频方法进行分析[31-32]。本文选取短时傅里叶变换(Short-Time Fourier Transform, STFT)、连续小波变换(Continuous Wavelet Transform, CWT)进行信号分析比较。
4.2.1 短时傅里叶变换
短时傅里叶变换是最常用的时频分析方法之一[33],相比傅里叶变换,它的思想是通过把整个时域过程分解成无数个等长小段信号,然后进行加窗处理,再进行傅里叶变换(Fourier Transform, FT)。在短时傅里叶变换过程中,频谱时间与频率分辨率由所选窗长度决定,假设信号为x(t),则信号的短时傅里叶变换定义如式(2)所示。
式中j=;τ为时移;t为时间,s;f为频率,Hz;h(t)是窗函数;x(t)h(t-τ) 为频谱。
4.2.2 小波变换
小波变换是把傅里叶变换中的无限长三角函数基换成有限长会衰减的小波基。对于低频和高频成分,小波基可以自适应调整伸缩和平移量,选择合适的时间和频率分辨率进行小波变换。由于一般连续小波变换与其他小波变换相比具有更好的分辨率和更多的基函数选择,因此本文选择连续小波变换对振动信号分析。连续小波变换定义如式(3)所示。
式中g(t)为振动信号,g(t)∊L2(R);*表示共轭;a为伸缩因子;b为平移因子;ψa,b(t)为小波基;
小波变换有许多小波函数,其中Morlet小波与典型的冲击信号具有瞬态相似性,而Cmor属于复Morlet,相比于Morlet小波具有更高的时频聚集性。因此,选择Cmor小波作为小波基。运用matlab软件对图5中工况1的局部时域信号进行时频分析,得到时频图如图6所示。
从图6中可以看出,短时傅里叶变换和连续小波变换都可以将信号中的频率成分分离出来,其信号能量主要分布在低频范围内(1~10 Hz)。从图6a可以看出,短时傅里叶变换得到的时频图像分辨率并不理想,对于低频成分突出并不明显,主要是由于窗函数固定导致的,根据不确定性原理可知,窗窄时,频率分辨率差、窗宽时,时间分辨率低。从图6b可以看出,小波变换得到的时频图相比图6a具有更好的时频聚集性,能量分布更加清晰,这主要是因为小波变换的小波基相比于短时傅里叶变换窗函数是可变的,能够自适应调整小波基的大小进行变换,对低频频率成分有良好的时频分辨率。因此,本文选择连续小波变换对振动信号进行特征提取。
功率谱密度(Power Spectral Density, PSD)是对随机变量均方值的量度,表示信号单位频带所占能量随频率变化的情况,对于一个随机信号σ(t),其功率谱密度定义如下:
式中σ(t)为振动信号,Fσ(ω)为σ(t)的傅里叶变换,Sσ(f)为信号的平均功率谱(或能量)在频域上的分布,即单位频带的功率随频率变换的情况。
对信号的时频谱时间做积分,得到功率谱密度(单位为dB),表示信号单位频带所占能量随频率变化的情况[34],不同工况下各测点频率与能量如表4所示。
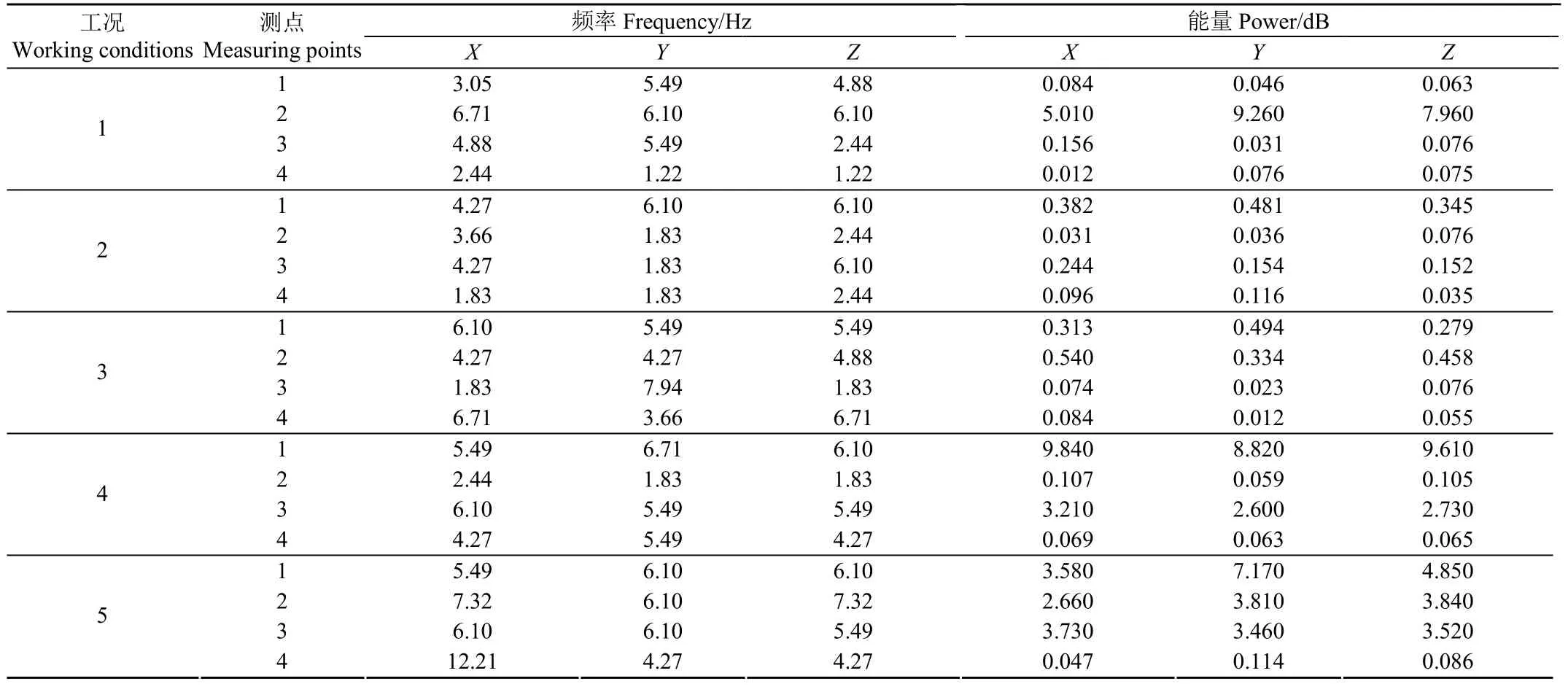
表4 各测点不同方向的频率与能量Table 4 Frequency and energy in different directions of each measuring points
5 锤击法试验
为检验试验部件是否存在局部共振现象,对各部件测点的振动数据及锤击激振响应进行分析。锤击法原理是通过力锤敲击结构被测点,通过力传感器和加速度传感器同时拾取激励信号φ(t)和响应信号γ(t),并对输出和输入的傅氏变换γ(ω)和φ(ω)做比值运算,得到其传递函数(频响函数),如式(5)所示,进而获得相应模态参数。本文采用多参考点测试方法,采样频率为12.8 kHz,频率分辨率为0.38 Hz,根据模态分析原理,每个测点重复5次试验。
其中测点1处3个方向上的频响函数图如图7所示。
从表4中可以发现,信号能量分布主要集中在低频范围,因此本文选择各测点的前 5固有频率进行分析比较,如表5所示。
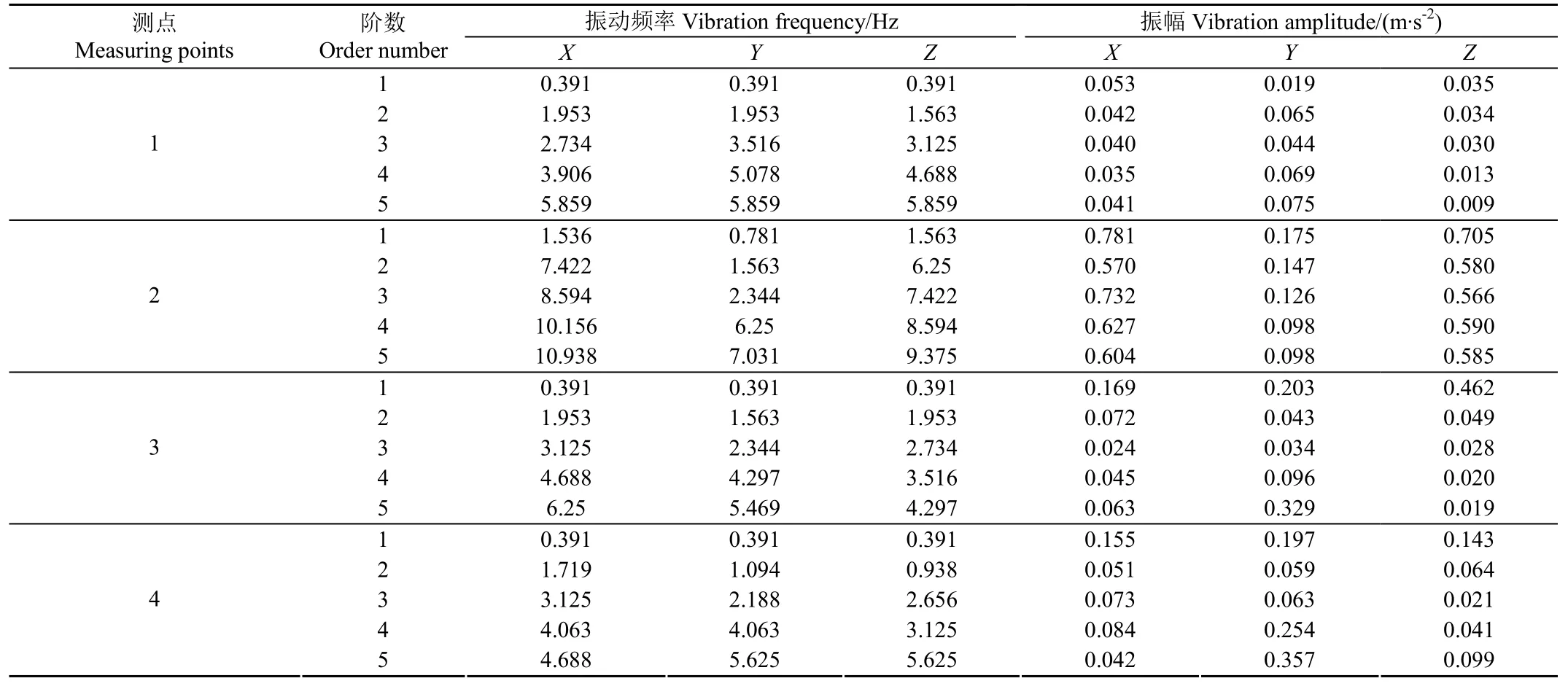
表5 各测点不同方向前5阶固有频率Table 5 The first five natural frequencies of each measuring point in different directions
从表4和表5可以看出:
1)取苗摆动装置工作时(工况1),表4中测点1、3、4处的能量极少,最大为0.084 dB,而滑轨底座测点2在X,Y,Z方向上的能量分别达到了 5.01、9.260和7.960 dB,其中Z方向上信号能量主要分布在6.10 Hz,对比表5发现,测点2的第2阶固有频率6.25 Hz与测点2的主要激励频率6.10 Hz相近,据此判断在测点2处可能产生共振。
2)仅取苗机械手开合工作时(工况2),所产生的的能量在各方向上都比较小,苗盘输送装置支座测点 1在Y方向最大为0.481 dB,说明取苗机械手开合对整机所产生振幅较小,不是整机振动的主要来源。对比表5(测点1)发现,该运动造成的振动大小与结构的固有频率无关。
3)仅苗盘横移工作时(工况3),各测点在X,Y,Z方向上产生的振动能量都比较均匀,其中滑轨底座测点2在X方向上的能量最大为 0.540 dB,主要分布在4.27 Hz,对比表5(测点2)发现,所产生的振动频率与固有频率无关。
4)仅顶苗机构伸缩工作时(工况4),测点2、3、4在X,Y,Z方向上的能量较弱,取苗摆动装置支座测点3在X方向最大为3.21 dB,苗盘输送装置支座测点1在X,Y,Z方向的能量分别为9.84、8.82和9.61 dB,分别分布在5.49、6.71和6.10 Hz。对比表5发现,苗盘输送装置支座的主要激励频率5.49 Hz与该部位的第5阶固有频率5.86 Hz相近,可能产生了局部共振现象。
5)整机运转工作时(工况 5),各部件相互配合运动,整机运动产生的振动能量相比工况2、3在3个方向有所增加,但相比工况1下滑轨底座(测点2)和工况4下苗盘输送装置支座(测点1)在3个方向的振动能量都有所下降,说明整机运动比单个部件运动对整机造成的振动有所增加,但振动最大能量有所下降,工况 1时滑轨底座在Y,Z方向的能量分别为9.26和7.96 dB,工况5时滑轨底座在Y,Z方向分别为3.81和3.84 dB,振动能量最大下降了58.85%左右。
6 结 论
1)通过对移栽机振动检测分析,结果表明:取苗摆动装置、苗盘横移运动是该移栽机主要激振源;而取苗机械手开合、顶苗机构伸缩运动是造成该移栽机振动来源的次要因素。根据以上分析,顶夹式移栽机设计时应着重考虑取苗摆动装置的设计,在不影响工作效率的情况下,应尽量避免造成冲击,可以把摆动气缸改为曲柄摇杆机构驱动从而降低振动,提高移栽机工作可靠性。
2)单个部件运动与整机运转产生的振动情况:取苗摆动装置工作时,取苗摆动装置挡板(测点4)在Y方向上振幅为 5.43 m/s2,整机运转时,在Y方向振幅为1.71 m/s2,振幅下降了68.51%左右,而取苗机械手开合、苗盘横移、顶苗机构伸缩等运动与整机运转状态下相比,造成的振幅大小相差不大。
3)连续小波变换分析得出移栽机的激振频率主要以低频为主,频率主要分布在低频0~10 Hz处,不同工况下试验部件各测点前 5阶固有频率与各测点代表部件主要振动频率相比,发现取苗摆动装置运动时,滑轨底座处的激励频率(6.10 Hz)与该测点的固有频率(6.25 Hz)相近,发生了共振现象。
猜你喜欢
农机使用与维修(2022年7期)2022-07-14
计算技术与自动化(2022年1期)2022-04-15
机电工程技术(2021年3期)2021-09-10
强度与环境(2021年3期)2021-07-27
现代电子技术(2020年13期)2020-08-07
环球时报(2019-07-18)2019-07-18
宇航计测技术(2018年3期)2018-09-08
现代职业教育·中职中专(2018年7期)2018-05-14
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27