广义回归神经网络在光纤陀螺零偏补偿中的应用
2021-09-04 07:44陈洪刚王建青
导航与控制 2021年3期
陈洪刚,王建青,洪 伟,张 培,江 维
(中国航天科技集团公司第十六研究所光纤传感事业部,西安 710100)
0 引言
光纤陀螺具有动态范围大、可靠性高、全数字、全固态结构等优点,是惯性导航系统及航姿测量系统的核心传感器,广泛应用于航天、航空、航海、兵器等领域[1-2]。光纤陀螺对温度较敏感,环境温度的变化以及陀螺自身发热会引起陀螺的解调误差,导致陀螺的零偏漂移。
传统的变温零偏补偿模型采用多项式拟合法[3-5],该方法在工程上容易实现,但补偿效果较差。近年来,随着人工神经网络算法的发展,有学者将BP神经网络引入到陀螺变温零偏补偿模型中[6-7],取得了较好的补偿效果。然而,BP神经网络算法本身容易陷入局部最小值。
光纤陀螺零偏在-40℃~+60℃范围内呈现非线性变化,无特定的规律,而广义回归神经网络(Generalized Regression Neural Network,GRNN)适合解决该类非线性问题。GRNN算法中最关键的参数是光滑因子,选取合适的光滑因子可以减小GRNN预测误差,一般采用试凑法确定该参数,该方法计算效率低且依赖于相关人员的经验。本文采用果蝇算法(Fruit Fly Optimization Algorithm,FOA)改进了GRNN,建立了FOA-GRNN模型,采用该模型对光纤陀螺的变温零偏进行了补偿。计算结果表明,FOA-GRNN模型的补偿精度优于GRNN模型。
1 变温下零偏漂移机理分析
当载体旋转时,光纤陀螺中顺、逆时针光发生干涉后,光强信号可表示为

式(1)中,I为光强,A为干涉信号幅度,Φs为外界转速引起的Sagnac相移。
温度变化时,光纤的折射率、导热系数、膨胀系数等物理参数会发生变化。由于热光效应和弹光效应,光纤陀螺中顺时针光和逆时针光产生的非互易相位误差为[7]

式(2)中,β0=2π/λ0为光在真空中的传输常数,c0为光在波导中的传播速度,n为光纤的折射率,ΔT(z)为光纤在z点温度分布的变化量,L为光纤长度。
式(2)表示的非互易相位误差也称Shupe误差,它与Sagnac效应引起的相位变化叠加在一起,此时光强信号变为

由于探测器只能检测到光强变化,无法分辨相位变化,因此该误差会导致陀螺的零偏漂移。
2 变温零偏补偿方案研究
光纤陀螺中安装有温度传感器,在陀螺的采集数据中可以观测到两个变量:零偏和温度。以某型光纤陀螺为例,将其置于温箱中,设置变温速率为1℃/min,采集-40℃~+60℃范围内的输出,陀螺零偏与温度的关系曲线如图1所示。
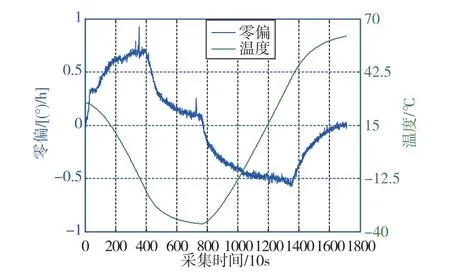
图1 变温零偏与温度的关系曲线Fig.1 Relationship between temperature and FOG bias
图1表明,光纤陀螺在-40℃~+60℃范围的零偏变化是复杂的、非线性的。广义回归神经网络(GRNN)是径向基神经网络的一种,具有较强的非线性映射能力和鲁棒性。该网络收敛于样本量积聚较多的优化回归面,并且需要的训练样本数量较少。因此,GRNN适用于陀螺的变温零偏补偿。
GRNN建模算法中,需要初始化的参数只有一个,即光滑因子。一个最优的光滑因子可以使函数逼近的过程较平滑,避免“过学习”情况的发生。传统的确定最优光滑因子的方法为:先将其设置成一个较小的参数,之后逐步增大,得到一组光滑因子的等差数列,分别使用这些因子建模,比较网络预测误差。该方法需要建模人员全程参与,效率低,计算误差大。若将果蝇算法与GRNN算法相结合,使用循环迭代的方式来寻找光滑因子的最优值,则可以提高模型的适应性,减小预测误差。
3 GRNN和FOA-GRNN算法分析
3.1 GRNN算法
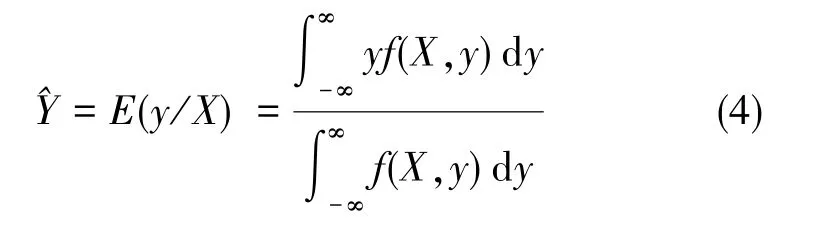
GRNN是基于非线性回归理论的前馈式神经网络[8],非独立变量y相对于独立变量x的回归分析实际上是计算具有最大概率值的y。设随机变量x和随机变量y的联合概率密度函数为f(x,y),已知x的观测值为X,则y相对于X的回归,也即条件均值为


3.2 FOA-GRNN算法
果蝇算法(Fruit Fly Optimization Algorithm,FOA)由学者潘文超于2011年提出,属于仿生学群体演化算法的一种[9]。依据果蝇的觅食原理,该算法具有以下几个步骤:
1)随机初始化果蝇的群体位置,群体中的每只果蝇依靠嗅觉搜索食物,并按照随机的方向和距离开始移动,有

式(6)中,(X0,Y0)为每只果蝇的初始位置,r1和r2为果蝇的移动步长。
2)计算群体中每只果蝇的味道浓度判定值,并代入相应函数,得到味道浓度,即
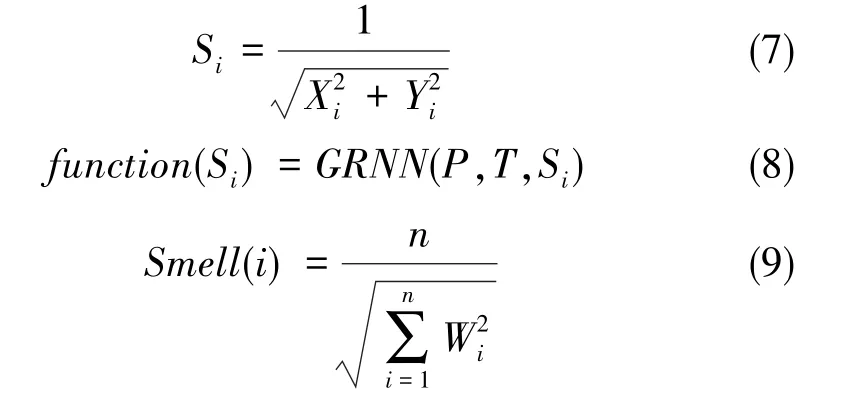
式(7)中,Si为每只果蝇相对于飞行原点距离的倒数,将该值作为GRNN网络的光滑因子σ代入式(8)进行迭代计算。式(9)中,Wi为GRNN网络的预测值与真实值之间的误差,n为果蝇种群数量,S mel l(i)为味道浓度,味道浓度高则代表GRNN网络的预测误差小。
3)找出群体中味道浓度最高的那只果蝇,记录其坐标,令其它果蝇飞向该坐标,形成新的群聚位置,即

式(10)中,P(i+1)为果蝇的新位置,P(i)为果蝇记忆中的最优位置。
4)重复执行步骤1~步骤3,同时判定新的味道浓度是否优于前一次的值,直到函数收敛或完成全部迭代次数以后输出最优解。
采用FOA算法改进的GRNN模型计算流程图如图2所示。
4 实验验证
对同一只光纤陀螺产品连续采集2组变温零偏数据,将数据作10s平滑处理,并进行归一化。将第一组零偏数据作为训练样本,第二组零偏数据作为测试样本,分别建立GRNN模型、FOAGRNN模型,对陀螺变温零偏进行补偿。采用这两种模型进行零偏补偿时,该方法是在上位机上运算,不占用光纤陀螺的资源,无需增加额外的硬件,同时兼顾了补偿效果,是一种可行的补偿方案。
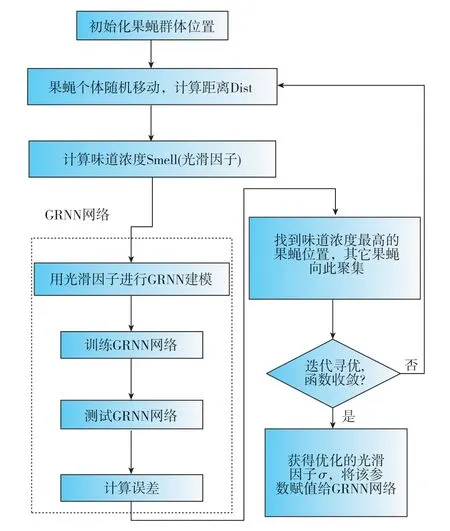
图2 FOA-GRNN计算流程图Fig.2 Flowchart of FOA-GRNN
运用GRNN模型时,光滑因子σ取值为1。运用FOA-GRNN模型时,其参数设定如下:
1)陀螺输出的零偏采样点为25390个,经过10s平滑后采样点为2539个,因此果蝇群体的规模为2539。
2)为防止果蝇群体盲目飞行,将群体的初始位置设定在(0,0)与(1,1)之间。
3)果蝇的飞行步长决定了飞行半径。当飞行半径较大时,算法的全局寻优能力强,收敛速度快,但是寻优精度低;反之,当飞行半径较小时,算法的局部寻优能力强,收敛较慢,但寻优精度高。综合考虑寻优能力和寻优精度,可将果蝇的飞行步长设定为0.5。
4)迭代次数设定为100次。
果蝇的飞行轨迹及寻优过程如图3、图4所示。
由训练结果可知,寻优过程在第18代收敛,此时的味道浓度判定值为0.0016,果蝇种群的聚集位置为(17.4423,17.1268),最优的光滑因子σ值为0.0409。
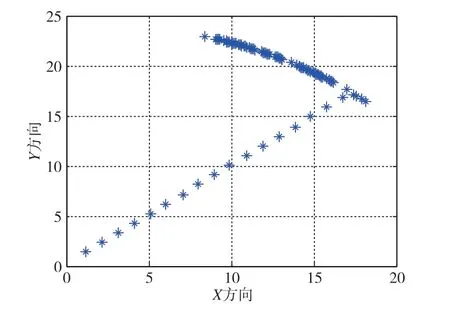
图3 果蝇飞行路线图Fig.3 Flight path of fruit fly

图4 FOA-GRNN的迭代优化过程Fig.4 Optimization process of FOA-GRNN model
训练样本和测试样本如图5所示,各模型补偿结果如图6、图7所示。
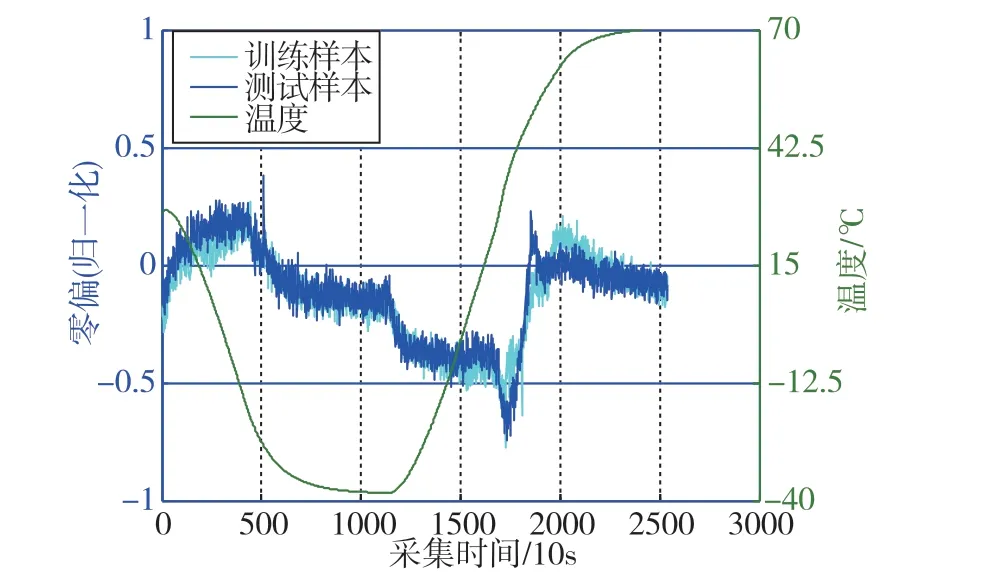
图5 连续测试的两组变温零偏Fig.5 Two sets of FOG's bias data

图6 GRNN模型补偿结果Fig.6 Compensation results of GRNN model

图7 FOA-GRNN模型补偿结果Fig.7 Compensation result of FOA-GRNN model
陀螺补偿前后的零偏稳定性对比结果如表1所示。

表1 陀螺补偿前后零偏稳定性对比Table 1 Comparison of FOG's bias drift before and after compensation
由表1可知,采用FOA-GRNN模型补偿后的零偏稳定性为0.0663(°)/h,相比于GRNN模型的0.0908(°)/h,补偿精度提升了27%。
5 结论
当环境温度变化时,光纤陀螺输出的零偏值会发生漂移,从而产生测量误差。针对光纤陀螺的零偏漂移与温度变化呈非线性、传统补偿方法误差较大的问题,本文将广义回归神经网络运用到光纤陀螺的零偏补偿中,同时使用果蝇寻优算法改进了该神经网络,建立了FOA-GRNN模型。该模型需要的训练样本较少,且寻优能力强,迭代速度快,具备通用性。运用FOA-GRNN模型对光纤陀螺变温零偏进行了补偿,结果表明,补偿精度比GRNN模型提升了27%。采用FOA-GRNN补偿模型是变温环境下提升光纤陀螺精度的一种有效途径。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
学苑创造·A版(2022年3期)2022-03-29
福建基础教育研究(2019年2期)2019-09-10
学苑创造·A版(2019年6期)2019-07-11
通信产业报(2019年12期)2019-06-21
福建基础教育研究(2019年2期)2019-05-28
通信产业报(2018年26期)2018-11-22
中学物理·初中(2017年8期)2018-03-06
故事作文·高年级(2016年6期)2016-06-21
早期教育(美术教育)(2010年4期)2010-04-13