环境噪声信源分析与特征辨识虚拟仪器系统研发
2021-09-03 08:50:44乔佳乐刘昭廷刘祥楼孟祥斌
绥化学院学报 2021年8期
乔佳乐 刘昭廷 刘祥楼 孟祥斌 刘 声
(1.绥化学院电气工程学院 黑龙江绥化 152061;2.东北石油大学 黑龙江大庆 163318)
近年来,国内外对于噪声声源特性研究取得了一系列的成果,尤其是声源定位技术有了明显提升。基于时延技术TDOA[4]和基于波束形成技术SRP-PHAT的各类应用更加广泛[1-3]。其中,SRP-PHAT方法比TDOA方法更适合于远场环境。而GCC-PHAT方法误差更小且计算时间更快,在近场环境中比SRP-PHAT更具优势[4-6]。Al-Sheikh B[7]等人设计一种用于水平面360度扫描声信号的四元十字MIC阵列声源方向估计系统,将频谱分析和小波变换应用于参考传声器上,采用广义互相关算法对麦克风间的时延进行估计。对于小型便携式系统,特别是多任务微嵌入式系统,在采样率小于10kHz情况下进行准确声源定位仍具挑战性。Mohammad Shukri Salman、Thomas Padois、Maximo以及Kober V I[8-10]等人提出了一种将确定采样率输入信号转换成频率较高的另一信号的广义互相关GCC方法。可以根据GCC方法定位计算时间和目标位置估计标准差,得到算法最优插值因子,进而设计由五元交叉麦克风阵列构成的低采样率三维近场被动声源定位阵列。但是SRP-PHAT存在一个缺陷,即需要在大量候选位置上进行搜索,对于大型麦克风阵列系统而言,其实时运行速度太慢。针对此类不足,Yook D[11,12]等人提出了一种两层搜索空间聚类方法来加速基于SRP-PHAT的声源定位。该方法的特点是将声源的候选位置划分多组,找到可能包含最大功率位置的小部分组,再通过少量组内搜索确定声源位置。运用该方案计算既可以大幅度降低成本,又可以保障定位精度没有损失。而在远场模型中,从小型麦克风阵列中提取方向信息的相关技术正稳步发展。BaoQ[13]等人将感兴趣区域分成大小相同的局部网格,用自相关方法来评估每个网格的可能性,用MATLAB来展示声源方向实际可能分布的位置。在波束形成估计中使用插值法和自相关矩阵克服数据限引起的方向误差。上述一系列研究成果为本系统研发提供了理论支撑。
一、环境噪声信源特征辨识与分析机理
环境噪声信源类型多变,从时域分析角度分为瞬时冲击波、短时脉动波与长时连续波等不同类型,通过时域分析确定噪声波动态时间特征。从频域分析角度频谱分为单频有调声、多频有调声和冲击声,通过幅度谱或功率谱确定频域特征。从声源强度分析角度,由弱噪声到强噪声按听觉感受可进行分段。使用声级计测量噪声时,声压传感器采集声压信号。如果将其直接输出,只能得到与频率无关的线性声级。根据人耳的生理特点,人的听觉取决于声强与频率,即人所听到的声信号如果是相同的声压不同的频率,其感觉也会有一定差异。考虑到人耳对不同频率的声信号听辨与滤波特性的实际感受,同时参照等响曲线进行滤波处理,对人耳敏感的频率成分予以加强,而对人耳不敏感的频率成分进行适当的衰减,以求与人耳听觉的主观感受尽可能一致。此种修正方法称为频率计权,经过计权网络测得的声级称为计权声级。现已有A、B、C、D等多种计权网络,其等响曲线如图1所示。本系统采用A计权网络。
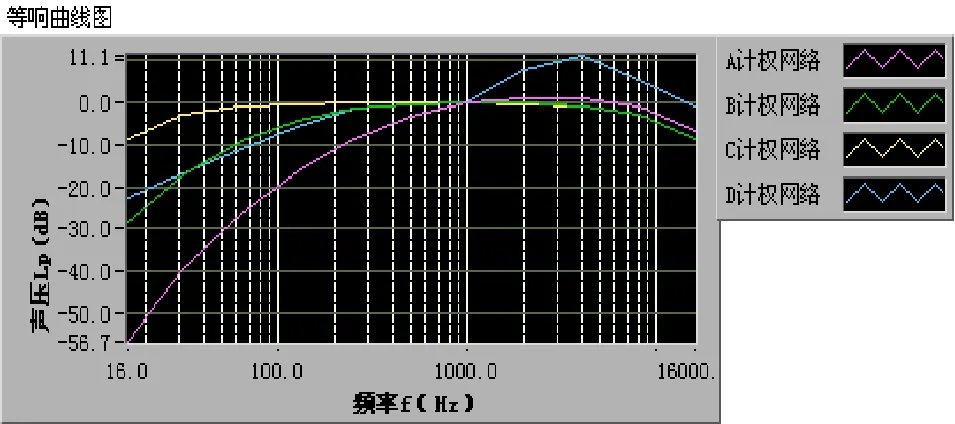
图1 计权网络的频率响应曲线
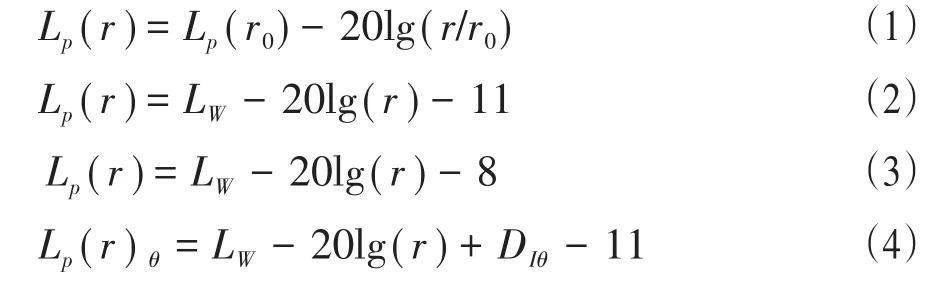
声源发出的噪声在空气中以振动波的形式向声源周边传递,空气对其传播形成阻力造成衰减。当声波类型属于无指向性点声源时,其几何发散衰减表达式参见(1.1)。其中,第二项表示了点声源的几何发散衰减量。若点声源倍频带声压级LW,且声源处于自由声场,则距离点声源r处的倍频带声压级Lp(r)表达为公式(1.2),如果声源处于半自由声场,则Lp(r)表达为公式(1.3)。当点声源具有指向性时,其强度分布指向性特性较强。而针对自由空间的点声源,在某一角度θ方向上距离该点声源r处的倍频带声压级Lp(r)θ表达参见公式(1.4)。其中,DIθ为θ方向的指向性指数,DIθ=10lgRθ;Rθ指向性因数,Rθ=Iθ/I;I为所有方向上的平均声强,单位W/m2;Iθ为角度θ方向上的声强,单位W/m2。
二、基于虚拟仪器技术的噪声信源特征分析与辨识系统构建
噪声信源特征分析与辨识系统的基本组成,按功能可分为噪声信息采集、信源空间定位、信源特性分析和信源特征辨识四个部分,具体参见图2。基于虚拟仪器技术完成系统构建,需要完成四个关键环节。第一是噪声信息采集环节,采用半球型麦克风阵列通过空间布点实现多路噪声信息连续采集,需要预先对半球型麦克风阵列进行空间检测点定位,以此作为声源点空间定位的参考点。第二是噪声信源空间定位环节,根据采集的噪声信息样本分析,通过声源点定位算法准确定位声源,确定声源点强度。第三是噪声信源特性分析环节,利用虚拟仪器技术中的单频信息提取技术对噪声信源进行时域分析和频域分析,确定声源的时频特性。第四是噪声信源特征辨识环节,利用噪声特征识别技术,通过主特征比对确定信源类型。

图2 噪声信源特征分析与辨识系统
基于虚拟仪器技术实现噪声信源特征分析与辨识系统构建。依托LabVIEW虚拟仪器软件开发平台,通过半球型麦克风阵列实现对环境噪声的实时自动监测,半球型麦克风阵列实物参见图3。采集的实时信息传到上位机,进入LabVIEW软件处理系统。信源空间定位、信源特性分析和信源特征辨识三个部分由上位机通过虚拟仪器技术实现。智能测试前端硬件系统采用STM32单片机为核心,运放采用了精密放大器OPA340,精密放大器由麦克风阵列、信号调理电路、与上位机的无线通信电路组成,智能测试前端电路实物参见图4。

图3 半球形麦克风阵列实物图
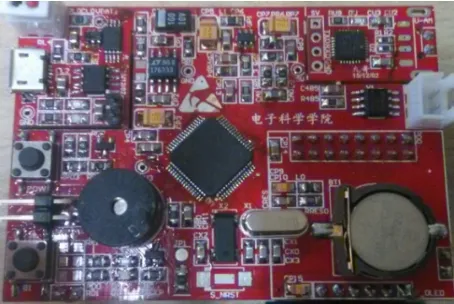
图4 智能测试前端电路实物图
三、实验测试
测试环境,选定50m2的声学实验室,室内温度23℃,相对湿度42%,声源为Type4205和HP1001,将智能检测前端固定在离地面2.5m的室内顶端,分别将声源放置不同的方位。声源发出1000Hz单频波,声压强度为100dB。放置于不同方位,声源高度0.23m。具体系统测试数据参见表1。
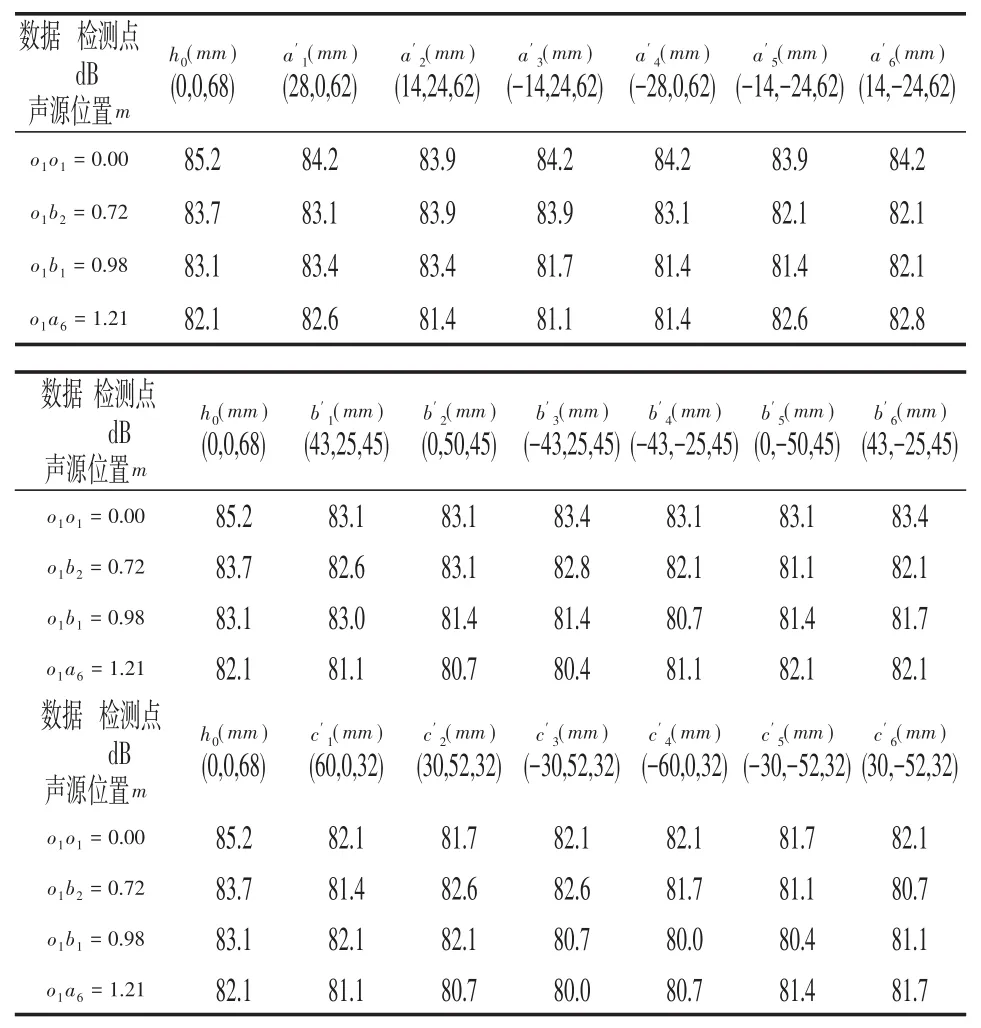
表1 系统测试数据
测试系统人机交互界面参见图5。界面有声源点定位相关数据和平面坐标指示。有两个视窗清晰地显示声源的时域波形和频谱。根据测试结果分析发现,声源点定位存在误差,具体参见表2。
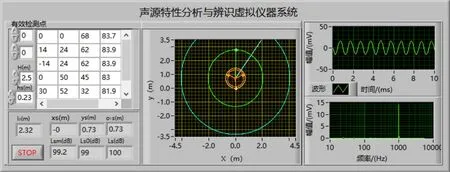
图5 声源特性分析和信源特征辨识界面
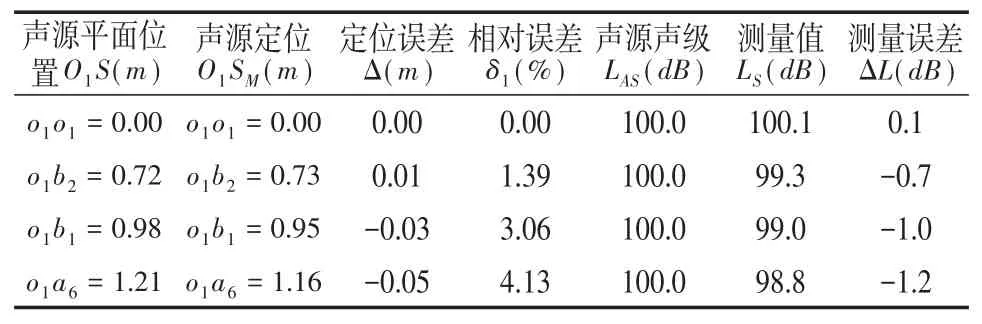
表2 误差数据分析表
四、结论
基于针对环境噪声进行连续实时监测与同步时频分析一体化的设计理念,设计开发以虚拟仪器技术为核心的环境噪声信源特征分析与辨识系统。由19个电容声压传感器按半球型均匀布设形成检测前端阵列,以LabVIEW软件开发平台为支撑,实现对环境噪声信号从采集、参量计算、时频分析到声源类型判定多功能一体化监测。测试结果表明:该虚拟仪器系统定位最大相对误差4.13%,测量声级分辨率0.01dB。
猜你喜欢
无线电工程(2022年4期)2022-04-21 07:19:44
电子制作(2018年23期)2018-12-26 01:01:04
测控技术(2018年11期)2018-12-07 05:49:22
电子制作(2017年13期)2017-12-15 09:00:26
电子世界(2017年16期)2017-09-03 10:57:36
电子制作(2017年1期)2017-05-17 03:54:33
山东工业技术(2016年15期)2016-12-01 05:31:11
海洋科学进展(2016年3期)2016-08-12 06:45:20
电源技术(2016年9期)2016-02-27 09:05:28
中国卫生标准管理(2015年16期)2016-01-20 09:26:15