
基于UWB在丘陵山地定位的可行性试验研究*
2021-09-02 08:20袁旸媚杨俊朗姜申易胡文武
南方农机 2021年16期
袁旸媚,杨俊朗,姜申易,胡文武
(湖南农业大学机电工程学院,湖南 长沙 410128)
0 引言
随着农业现代化的不断发展,各种应用于农业机械的先进技术不断涌现。而丘陵山地地区,由于地形复杂多样以及受到环境等多重因素的影响[1-2],农业机械的定位技术精度会有较大的误差,这在一定程度上阻碍了农业机械化的推广和农业规模化的发展。当前,我国农业机械正朝着智能化和自动化不断迈进,而要平衡各个区域的农业发展,对于山地丘陵地区农业机械定位技术的研究是势在必行。
为了实现农业机械智能化和自动化,需要对机械装置的实时位置进行跟踪。项目组采用一种基于超宽带(Ultra Wide Band,UWB)技术的测距定位系统,实现农业机械装备的跟踪和精准定位。UWB是一种无线载波通信技术,利用纳秒级的非正弦波窄脉冲传输数据,工作频段在3.25 GHz~6.75 GHz,频宽典型值为500 MHz或1 GHz[3],所以可以获得亚纳米的精确时间。UWB技术具有发射信号功率谱密度低、截获率低、对信道衰落不敏感、系统复杂度低、功耗低、定位精度高等优点[4]。
为了研究UWB定位技术应用于山地丘陵的可行性,从而实现农业机械的精准跟踪定位,利用浩如科技基于decawave公司的DWM1000模块研发的高精度实时定位系统HR-RTLS1,进行了UWB定位技术在丘陵山地的模拟试验以及验证试验,对有无树干、叶簇等遮挡进行了对比试验,并对于试验得到的一系列数据和现象进行了分析处理。实践证明,利用UWB定位技术定位农业机械,对于农业生产发展及实现农业现代化的重要战略目标具有深远意义[5]。
1 实验设备与方法
1.1 技术原理
1.1.1 TWR测距
UWB装置是通过标签和基站间互发消息并记录相关时间戳的方法来实现TWR测距,并计算两模块间的距离值。TWR测距原理图如图1所示,使用标签发送一条Poll消息、基站回复Resp消息、标签发送Final消息为一个测距周期的方法进行测距。

图1 TWR测距原理图
Tprop为飞行时间,计算公式为(1),结合电磁波传播速度c(光速),得出距离公式(2)。

1.1.2 三边测距算法
在实际定位时,若要获得标签的坐标位置,至少需要三个参考基站,采用三边测量法进行测量[6]。基于UWB测距的三边测量法理论基础三边测量的原理如图2所示。

图2 三边测量法原理图
以三个节点A、B、C为圆心作圆,坐标分别为(Xa,Ya)、(Xb,Yb)、(Xc,Yc),三个圆周相交于一点D,交点D即为移动节点,A、B、C即为参考节点,A、B、C与交点D的距离分别为da,db,dc。假设交点D的坐标为(X,Y)。

由上式可得到交点D的坐标为:
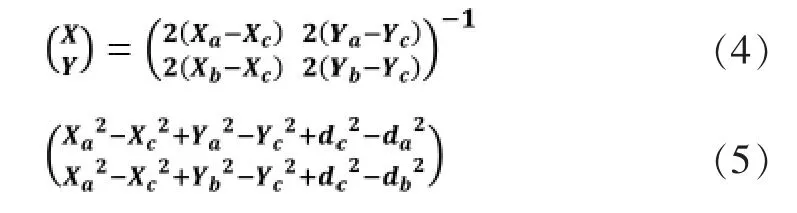
则:已知无人机上定位基站三点的坐标,得到测量标签距离三个基站之间的距离,便可得到被测标签的坐标。
1.2 平台与硬件结构
该模块是组成HR-RTLS定位系统的最小单元,可通过拨码开关配置为基站或标签;板上配有OLED显示器,可实时显示与其他基站或标签的测距值[7],如图3所示,标签与基站间的距离D=C(T2-T1)。

图3 标签(左)、基站(右)
标签、基站测距的示意图如图4所示。通过脉冲在标签和基站之间的飞行时间计算出标签基站之间的距离。
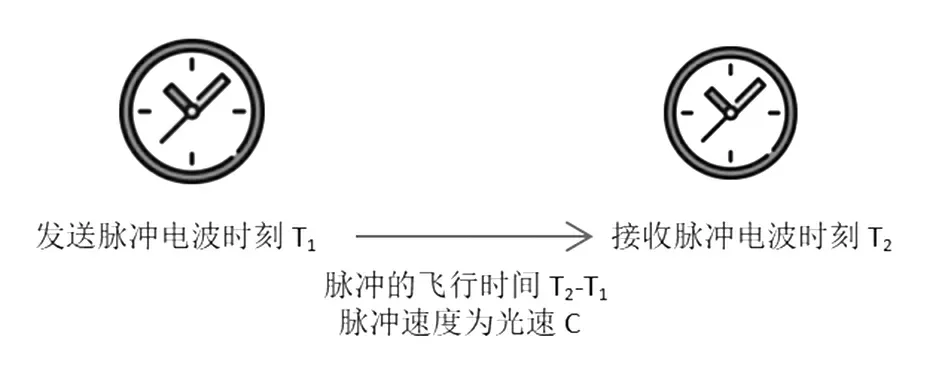
图4 信号传播示意图
1.3 试验方案
为了研究UWB定位技术运用于山地丘陵地区的可行性,首先对于树林环境进行了模拟。对于树林中树干遮挡这一因素,将树干直径分解成宽度、厚度两个维度分别进行模拟分析。利用木板模拟树干,通过厚度的叠加、宽度的叠加来模拟不同直径的树干。接下来在树林实地利用树干以及灌木丛进行验证试验。
具体试验过程中,由于考虑到在树林定位距离不超过30 m,于是模拟试验定位距离最远定为30 m。距离数据由电脑端收集,每组试验收集100组数据,取平均值。
2 定位试验及数据分析
2.1 模拟试验
2.1.1 距离变化及视距情况模拟试验
选择试验场地为空旷平直路面,在地面进行距离标记,共30个具体点。将标签和基站固定于三脚架上,三脚架底部悬挂铅锤以保证定位。试验器材放置示意图,如图5所示,基站位置固定于O点右端1 m处,标签从O点左端1 m处依次叠加2 m向左移动直至15 m,在每个标签放置点都进行木板遮挡与无遮挡的对比试验。此为一组试验。之后基站从右端1 m处依次叠加2 m向右移动直至15 m,在每个基站放置点,都重复第一组试验的步骤。

图5 试验器材放置示意图
当基站和标签位于每个固定点时,进行木板遮挡与无木板遮挡的对比试验。观察定位信号与有无木板遮挡以及距离变化的变化情况。在每个固定点进行的试验如图6所示。

图6 距离变化及有无木板遮挡模拟试验图
记录数据结果如表1所示。根据试验数据发现,有无木板遮挡对定位信号存在一定的影响,误差随着基站标签距离的增大有一定的波动,但波动起伏在5 cm以内,误差保持在5 cm之内且随着距离增大整体有下降的趋势。

表1 模板遮挡有无及距离模拟试验数据
2.1.2 厚度试验
在第一步得到的数据中,当标签基站距离为10 m时误差为最大,为保证其广泛可用,选取10 m作为厚度以及宽度试验中基站标签之间的距离。试验确保木板能将基站标签完全遮挡,从一块木板开始,依次叠加木板增加厚度,标签基站位置保持不变,距离为10 m,观察厚度变化对于定位信号的影响。
记录数据结果如表2所示。根据试验数据发现,木板厚度的变化对于定位信号的影响很小,误差仅在10 cm以内波动。

表2 厚度试验模拟数据
2.1.3 宽度试验
从一块木板宽度依次增加,确保各块木板间没有间隙(钉住),标签基站的位置不动,观察宽度变化对于定位信号的影响。考虑到树直径的实际因素,最大宽度定为1 m。
根据试验数据发现,木板宽度的变化对于定位信号的影响很小,误差仅在5 cm以内波动。记录数据结果如表3所示。

表3 宽度模拟试验数据
2.2 实地验证试验
2.2.1 树干试验
根据以上的木板厚度、宽度的模拟试验以及基站标签的距离试验,可以看到这些因素对于定位信号的影响很小。于是在树林进行实地试验,以进一步检测、验证结论。
树林实地——树干遮挡试验,如图7所示,在树林中选取直径大小不一的树干,标签基站间的距离依次增加,分别记录在空地以及有树干遮挡的距离数据,观察误差情况。选取树干直径为25.25 cm以及34.06 cm的两棵树进行试验,数据记录如表4、表5所示。

图7 树林实地——树干遮挡试验

表4 25.25 cm树干试验数据

表5 34.06 cm树干试验数据
通过以上试验发现,树林实际环境的测距误差较模拟试验误差有10 cm~35 cm的差距,误差都保持在35cm左右,且以上数据中90%以上的误差值处于10 cm~30 cm之间。
2.2.2 叶簇试验
对于树林环境下的叶簇遮挡,利用灌木丛进行试验。选取了疏密程度不一的四个灌木丛,分别定位1级、2级、3级,数字越大表示灌木丛越密即表征树林叶簇更加茂盛,灌木丛如图8所示。


图8 灌木丛试验
首先将基站和标签置于无遮挡的环境下,记录无遮挡时的定位距离。再将基站和标签分别置于灌木丛两端,距离保持于无遮挡情况下相同,观察随着密度的增大定位精度的变化情况,试验数据记录如表6所示。从数据中发现,随着灌木丛密度增大,定位误差也随之增大,但是也保持在可控范围30 cm以内。根据以上树干实地试验与灌木丛试验得知,UWB定位信号会受到树干直径、叶簇疏密程度的影响,但而对于实际应用,基站标签距离只需保持在亚米级即可[8],因此,UWB定位可满足实际树林的生产需求。

表6 灌木丛试验数据
3 结论
本试验研究UWB定位在山地丘陵地区的可行性,分别利用木板进行了模拟试验以及树林实地的检测验证试验。试验结果表明:在树林环境下,由于受到树干、叶簇遮挡,UWB定位信号会受到影响,但试验中测距误差在36 cm以内,能够满足实际树林生产需求;将UWB定位运用于农业生产定位,可比较准确地监测控制农用机械的移动,具有一定创新性,符合当今农业生产自动化、智能化的需求。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
军事文摘(2021年16期)2021-11-05
电子制作(2019年19期)2019-11-23
少年漫画(艺术创想)(2019年11期)2019-04-20
电子制作(2019年24期)2019-02-23
作文大王·笑话大王(2017年4期)2017-05-05
科学启蒙(2017年3期)2017-04-10
小猕猴学习画刊(2017年1期)2017-02-17
小猕猴学习画刊(2017年1期)2017-02-17
太空探索(2014年1期)2014-07-10
