排肥单体独立控制的双变量施肥控制系统研制
2021-09-02 12:49张季琴黄家运
农业工程学报 2021年10期
张季琴,刘 刚,胡 号,黄家运
排肥单体独立控制的双变量施肥控制系统研制
张季琴1,2,刘 刚1,3※,胡 号1,3,黄家运1,3
(1. 中国农业大学现代精细农业系统集成研究教育部重点实验室,北京 100083;2. 宁夏大学机械工程学院,银川 750021;3. 中国农业大学农业农村部农业信息获取技术重点实验室,北京 100083)
针对当前变量施肥机无法根据实际田块尺寸调整作业行数,进而调节作业幅宽的问题,该研究通过改造玉米播种施肥机的排肥驱动方式,设计了一种排肥单体独立控制的双变量施肥控制系统。首先通过二次多项式拟合方法,构建了排肥单体的双变量控制模型;然后对排肥单体的定位方法进行了分析,提出排肥单体独立控制系统;最后对各行排肥量一致性、不同车速下的排肥量控制准确性以及各行独立控制性能进行试验研究。结果表明,在排肥轴转速为10~60 r/min的区间内,各行平均排肥量一致性变异系数为3.35%;在目标排肥量为350 kg/hm2,作业车速为7 km/h的条件下,排肥量控制精度达到97.6%;对于凸、凹和S形3种不同形状的施肥边界,各行排肥滞后距离相对于作业幅宽的变化率均小于15%。系统具有较高的控制准确性和稳定性,能够适应复杂施肥边界,可为玉米基肥变量施用装备的创新性研发提供技术参考。
农业机械;玉米;基肥;双变量;排肥单体;独立控制
0 引 言
变量施肥技术能够根据土壤养分或作物长势进行按需施肥,在降低肥料用量的同时,能够提高肥料利用率,提高产量,减少温室气体排放和对环境的污染[1-4]。现有变量施肥机的排肥方式主要包括离心式、转盘式、螺旋式和外槽轮式等[5-7]。其中,基于外槽轮的变量施肥机,通过改变排肥轴转速来实现施肥量调节[8-10],普遍存在施肥量调节范围小,低速排肥时脉动显著,排肥均匀性差等缺点[11]。
为了克服单一变量控制的缺点,提高变量施肥作业精度和稳定性,近年来,国内外学者在双变量施肥机的整机结构设计、控制系统集成等方面做了大量研究,并取得一定成果。刘成良等[12]研发了一种排肥轴转速、排肥口开度双调节的变量施肥机。吴金林[13]设计了一种液压驱动的双变量排肥装置,通过在排肥主轴两侧安装主轴马达和开口马达,带动主轴上所有外槽轮转动和左右移动,实现双变量调节。Su等[14-15]将手动调节开度的库恩气吸式点播机改造为有效工作长度可通过伺服电机自动调整的变量施肥机,经试验验证,在5个不同开度下,7个排肥器各行平均排肥量一致性变异系数为8.4%。戚武振等[16-17]设计了一种丝杠排肥轴连接机构,以步进电机为动力,带动排肥轴做轴向移动实现所有排肥器开度的自动调节。Alameen等[18]搭建了一个可以通过气缸调节所有排肥器开度的双变量施肥试验台,室内试验结果表明,该试验台具有较好的准确性、稳定性和调节快速性。施印炎等[19-20]设计了一种基于光谱探测的小麦精准追肥机,该机采用轴分段式执行机构,8个排肥器分2组,每组4个排肥器通过一个直流电机控制转速,一个步进电机控制开度,作业时,根据光谱传感器获取小麦冠层归一化植被指数,生成目标追肥量,通过对两组排肥器的开度、转速的实时调整,实现追肥量的精确控制,田间试验控制精度达到90%以上[21-22]。
综上可知,现有双变量施肥机一般通过一个驱动轴驱动多个排肥器同时作业,无法根据实际需要调整作业行数,最小作业宽度为机具幅宽。但田间作业区域大多形状不规则,且田块宽度一般不是作业幅宽的整数倍,在田块边缘易发生作业区域的重叠或造成垄沟边界的肥料浪费[23],无法进行跨处方图栅格作业。因此,本文拟改造现有玉米播种施肥机的排肥驱动方式,设计一种排肥单体独立控制的双变量施肥控制系统,以实现各行独立作业,作业幅宽可调,提高变量施肥机对田间复杂环境的适应能力。
1 整机结构与工作原理
1.1 整机结构
双变量施肥机实物如图1所示,整机主要由RTK- GNSS(Real Time Kinematic-Global Navigation Satellite System)定位系统、排肥单体独立控制的双变量施肥控制系统、施肥执行装置等组成。RTK-GNSS定位系统主要包括天线和接收机;控制系统包括车载终端、下位机控制器、伺服电机、减速器、电子推杆、电子位移传感器等;施肥执行装置主要包括肥箱、螺旋外槽轮排肥器、开度调节挡板、排肥管、开沟器、地轮等。该机与拖拉机采用三点悬挂方式连接,设有2个肥箱,每个肥箱配2个排肥器,每个排肥器为一个独立的控制单元,可实现排肥口开度、排肥轴转速的独立控制。最大作业行数为4行,作业幅宽为0.6~2.4 m,可根据实际作业需求调整,主要技术参数如表1所示。
1.2 工作原理
作业时,首先根据GNSS系统采集的坐标位置信息,计算获得单体排肥器的位置,查询处方图,得到各排肥单体的目标施肥量,再根据控制模型计算得到排肥器转速、开度控制信息,最后发送控制指令到下位机执行装置,实现变量施肥作业。该系统采用CAN(Controller Area Network)通信方式、各排肥器独立控制。控制系统原理如图2所示,RTK-GNSS接收机获取整机当前位置经纬度信息、车速信息以及航向角信息,并通过RS232串口发送给车载计算机;车载计算机根据当前位置信息以及RTK-GNSS天线的安装位置等信息,计算每个排肥单体的位置坐标,通过查询处方图,得到每个排肥器的目标施肥量信息,结合作业车速,形成单体排肥器的开度、转速控制决策,最后将控制指令发送给并联在CAN通信网络上的各排肥单体控制器,控制器通过对伺服电机和电子推杆的控制,实现对排肥器转速、开度的控制,最终实现精准施肥作业。
2 排肥单体控制原理
该排肥单体独立控制的双变量施肥机以单个排肥器为独立控制单元,通过双变量调节装置,实现排肥轴转速、排肥口开度的调节[24]。车载计算机通过CAN总线控制多个排肥器。各排肥单体的工作原理相同,因此,以一个排肥单体为例,对其施肥量的控制模型及田间精准定位方法进行分析。
2.1 排肥量控制模型
为了实现双变量施肥机的精确控制,建立一个排肥单体的双变量控制模型是关键。根据外槽轮排肥器的排肥原理,变量施肥机每公顷施肥量为[25]
式中为目标施肥量,kg/hm2;为单个排肥器单位时间排肥量,g/min;为排肥器个数;为变量施肥机作业车速,km/h为作业行距,即相邻2个排肥器之间的距离,m;k为机具打滑率。
由于该系统采用GNSS测速,伺服电机驱动排肥轴,机具打滑对排肥器的影响可忽略,即k=1,同时由于该控制系统以单个排肥器为一个独立控制单元,即=1,则式(1)可简化为
由式(2)可知,要实现施肥量的精确控制,必须获取单位时间排肥量与控制参数即排肥口开度(mm)和排肥轴转速(r/min)的关系。经过标定试验,获取不同开度、转速条件下的单位时间排肥量,利用Matlab软件进行二次多项式拟合,得到、与满足如下关系:
=-13.5+9.153+19.89-0.0982+1.756-0.3072(3)
拟合方程决定系数为0.9992,拟合度较高。根据目标施肥量范围确定开度后,代入式(3)即可获得排肥轴转速与的二次方程,通过解二次方程即可获得目标排肥转速。
作业时,通过处方图获取目标施肥量,确定开度,实时获取变量施肥机作业速度,代入式(2),计算可得单位时间排肥量,代入式(3)即可获得目标转速,进而控制伺服电机带动排肥器动作,实现施肥量的精确控制。
2.2 排肥单体定位方法
为了实现排肥单体的准确定位,需要根据GNSS系统获取的变量施肥机的当前经纬度信息,实时计算各排肥器的位置坐标。GNSS系统遵循NMEA-0183协议,利用ASCII码传递信息[26],本文截取包含位置、速度以及航向角的$GPRMC格式信息。为了实现排肥单体在平面上的准确定位,基于大地坐标系(WGS84)的经纬度信息通过墨卡托投影法(Mercator)转化为平面坐标信息。
作业时,GNSS天线安装在拖拉机驾驶室的上方,与各排肥器中心连线的垂直距离为(m),GNSS天线的平面位置坐标为(,),则第个排肥单体的平面坐标(x,y)的计算公式为[27]
式中θ为向量[x-x y-]T与平面坐标轴的夹角,(°)。d为第个排肥单体与GNSS天线之间的距离,m,计算方法如式(5)~(6)所示。
式中为航向角,(°),∈[1,]。
作业过程中,设备基本参数如GNSS天线与各排肥器中心连线的垂直距离、相邻2个排肥器之间的距离以及排肥单体个数等由用户根据设备实际情况通过控制软件输入。GNSS天线的平面位置坐标(,)以及航向角由对GNSS信息的解析和变换获得。为防止$GPRMC字段截取不完整造成定位信息丢失,本文采用C#正则表达式进行字段匹配。
3 控制系统设计
3.1 硬件组成
基于排肥单体独立控制的双变量施肥机控制系统主要实现对GNSS信息的采集、解析、存储,作业参数设置以及排肥单体的独立控制。系统采用CAN通信方式,以单个排肥器为一个独立控制单元,具有很好的可扩展性。控制系统硬件系统组成如图3所示。
本系统采用的GNSS设备是基于NovAtel公司的OEM615核心板卡开发的,支持北斗双频差分定位,RTK水平定位精度达到0.01 m。采用APC-3082工业平板作为车载终端,经串口由USB/CAN-IIC分析仪连接到CAN网络,实现人机交互、作业参数设置以及作业控制。电机选用MOTEC公司的ARES-8015-E-AC系列直流伺服电机,额定功率100 kW,额定转速3 000 r/min,根据MOTECIAN通信协议发送控制指令到伺服电机驱动器,驱动伺服电机转动进而实现对排肥轴转速的控制,与之配套的减速器减速比为1∶32。下位机控制器采用Arduino的Mega2560控制板,通过MCP2515模块连入CAN通信网络,可实现对电子位移传感器数据的采集和电子推杆的控制。电子推杆采用TB6600型驱动器,推力250/N、速度12 mm/s,主要实现排肥口开度大小调节。电子位移传感器选用米郎RTK系列,量程为75 mm,测量精度达到0.1 mm。GNSS设备和工业平板均采用12 V、60 Ah的锂电池供电。排肥控制单体的电源选用同型号锂电池,通过升压器转化为24V电压给伺服电机和电子推杆供电,通过降压器转转化为5 V电压给控制器供电。电子位移传感器由控制器的5 V电压输出引脚供电。每个排肥单体配备一块锂电池。
3.2 软件设计
使用C#语言,基于VS2012开发平台结合SQL2008数据库,开发上位机控制软件。软件系统在VS2012软件开发平台开发主体程序,利用SQL2008数据库实现GNSS信息的上传和存储,主要包括通信模块、参数设置模块和作业控制模块。其中,作业控制模式分为手动和自动控制模式,自动控制模式的软件工作界面如图4所示。
系统通讯模块使用CAN总线通讯技术,通过对CAN分析仪的二次开发,实现串口信号到CAN信号的转换。参数设置模块主要实现对设备信息和所用肥料信息的设置和存储。作业控制模块实现对排肥器的自动控制,控制方式主要有手动模式和自动模式。控制流程如图5所示。
作业时,首先启动系统,进行GNSS设备和CAN分析仪的通信连接,包括对通信端口的配置和波特率的选择,其中,GNSS设备波特率为115 200 b/s,CAN分析仪波特率为500 kb/s。然后进行系统作业参数设置,输入GNSS天线到排肥口的安装距离,相邻2个排肥器之间的距离以及排肥器个数,以便系统对各个排肥单体进行定位。完成参数设置后进入作业控制界面,根据实际作业需要选择手动或自动控制模式。
在手动模式下,用户可以根据实际情况选中需要作业的排肥器编号,然后输入排肥口目标开度和排肥轴目标转速值,并设定排肥时间,启动系统作业,到达设定时间后,排肥自动停止。该功能模块可实现对不同肥料标定。在自动模式下,系统通过解析GNSS信息,获得机具当前位置坐标、航向角以及车速信息,实时计算单体排肥器位置坐标,再根据处方图目标施肥量信息,结合施肥控制模型生成控制序列,形成控制指令并发送给下位机控制器,实现自动施肥。
4 田间试验
为了检验该双变量施肥样机的作业性能,于2020年11月中旬,在中国农业大学上庄试验站进行田间试验。采用GB/T 35487—2017《变量施肥播种机控制系统》对该样机的各行排肥量一致性、施肥量控制准确性进行检验。另外,针对该机的各行独立控制性能,设计了施肥边界为凸、凹、S三种形状的道路排肥试验。试验肥料采用撒可富“22-8-10”复合肥,堆积密度为964 kg/m3。
4.1 排肥量一致性试验
各行之间的排肥量一致性反映了变量施肥机的施肥均匀性,采用各行一致性变异系数进行评价。使用变量施肥控制软件的手动模式控制排肥。首先选中4个排肥器,设置排肥口开度为常用工作开度35 mm,调整排肥轴转速10~60 r/min,调节步长5 r/min,排肥时长1 min,系统达到设定时间自动停止。将4个排肥器依次从左到右编号,在每个排肥口放置小桶收集肥料并称量统计,每个转速条件下进行3次重复试验,取均值作为试验结果,试验结果如表2所示。
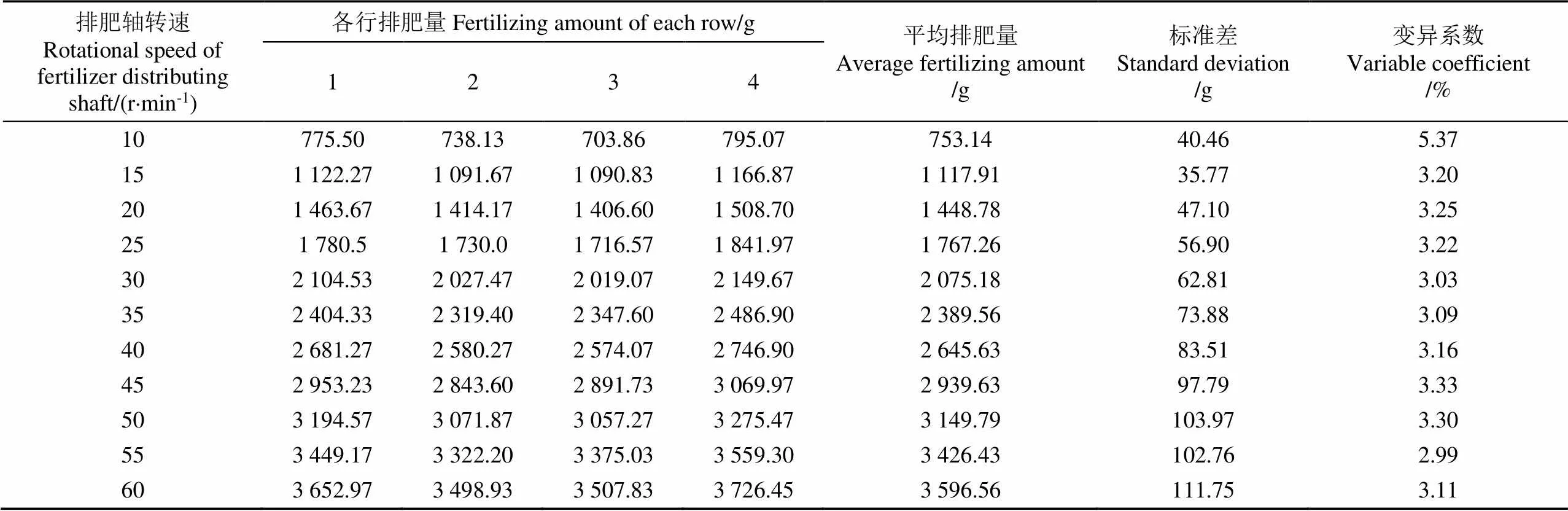
表2 各行排肥量一致性试验结果
由表2可知,当排肥轴转速为10 r/min时,各行排肥量一致性变异系数为5.37%,随着转速的提高,各行之间的排肥一致性提高,排肥稳定性增加。各行最小变异系数为2.99%,平均一致性变异系数为3.35%,整机具有较好的排肥稳定性。
4.2 排肥量控制准确性试验
排肥量控制准确性是评价变量施肥机作业性能的重要指标。田间试验在Jhon Deere的5E-904型拖拉机的牵引下进行,在排肥口挂小桶对排肥进行收集并称质量,分别在车速3、5、7 km/h[29]的条件下进行施肥作业50 m,每种车速条件下进行3次重复试验,取均值作为试验结果。排肥量控制精度采用式(7)计算,试验现场如6所示。
排肥量控制精度计算公式[28]为
式中为排肥量控制精度,%;1为实际排肥总质量,g;2为理论排肥总质量,g。
理论排肥质量2按照下式计算:
2=2/10 (8)
式中为作业面积,m2;2为目标排肥量,kg/hm2。
试验结果见表3,在目标排肥量35 0kg/hm2下,排肥量控制准确性随着作业车速的增加而增加,排肥精度在车速为7 km/h 时达到97.6%,满足GB/T 35487—2017的要求。

表3 排肥量控制准确性试验结果
4.3 各行独立控制性能试验
各行独立控制性能是评价排肥单体独立控制的变量施肥机对不规则形状施肥边界适应能力的重要指标。如果各行独立控制,则通过不规则施肥边界时,各行落肥位置与施肥边界的滞后距离不会发生变化;如果各行同步控制,则通过不规则施肥边界时,各行落肥位置与落肥边界的之间的滞后距离会有较大差异,因此,用实际落肥滞后距离相对于作业幅宽的变化率V来评价各行独立控制性能[30],计算公式如下:
4.3.1 试验原理
为了对该机各行独立控制性能进行评价,设计了直径为2.5m的半圆形凸、凹、S形的道路排肥试验。试验原理如图7所示。
以凸边为例,在平面坐标系内,假设4个排肥器的初始位置为1~4,以第2行排肥器为例,在时刻的位置与初始位置的距离为d,并随着整机沿作业方向行驶不断增大。当d=10 m时,2、3行排肥器到达施肥边界,发送2、3行排肥控制指令,启动排肥,当d=10.35 m时,1、4行排肥器达到施肥边界,发送1、4行排肥控制指令,启动排肥。
经过对边界形状的几何运算和分析可得,对于凹边排肥过程,1、4行排肥器先到达施肥边界,启动1、4行排肥,继续行驶0.35 m后,2、3行到达施肥边界,启动2、3行排肥;对于S边排肥过程,作业时,3、4行先到达施肥边界,启动3、4行排肥,继续行驶1.1 m后,1、2行达到施肥边界,启动1、2行排肥。因此,通过实时计算排肥器当前位置与初始位置的距离d,即可实现对不同形状排肥边界的准确识别和对排肥的精确控制。试验现场如图8所示。
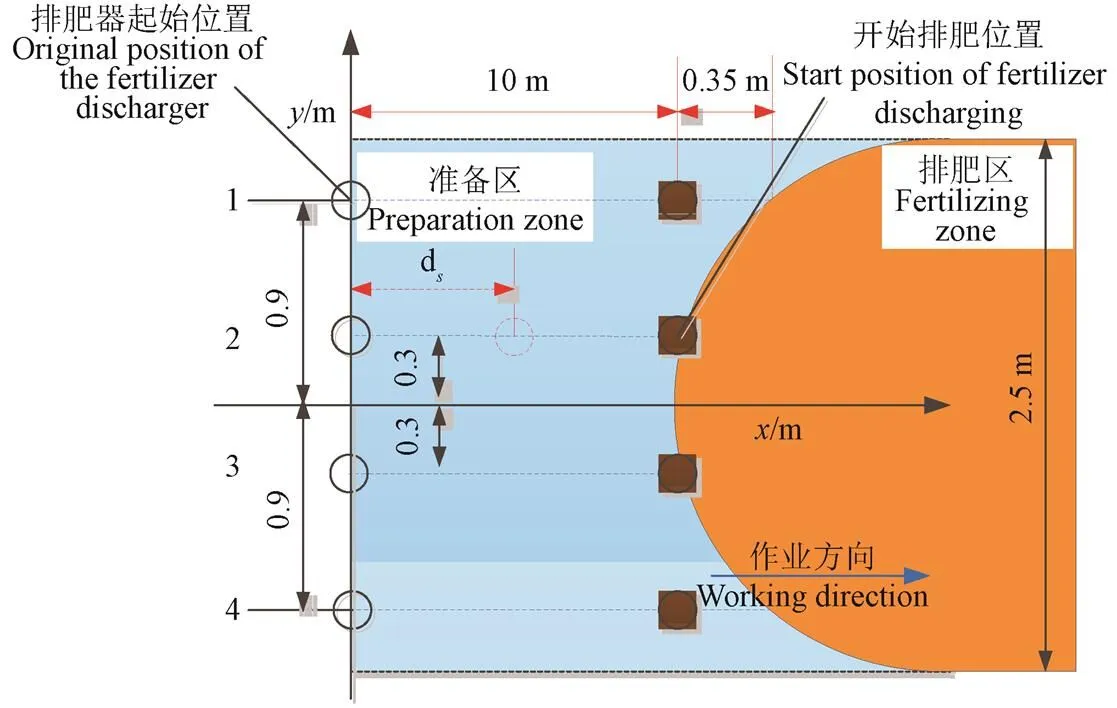
注:1~4为排肥器行数,ds为任意时刻排肥口与初始位置的距离,m。下同。
4.3.2 试验结果
道路试验在上庄试验站的一段水泥路面上进行,准备路段10 m,作业路段20 m。测得道路坐标原点的纬度为40.138 760 62,经度为116.176 540 078,施肥边界采样频率为5 Hz。确定施肥边界形状,选取施肥边界参数,作业车速为=5 km/h,在准备区启动控制软件,到达施肥边界后,系统自动排肥。试验结束后测量各行实际落肥位置相对于施肥边界的滞后距离,计算滞后距离变化率。每种边界条件下进行3次重复试验,取均值。
在每种施肥边界条件下,测量各行实际落肥位置相对于施肥边界的滞后距离,利用式(9)计算得到各行独立控制的滞后距离变化率,结果如表4所示。

表4 各行独立控制排肥滞后距离变化率
由表4可知,对于凹、凸、形3种不同形状的施肥边界,该变量施肥机的各行排肥器实际排肥位置的滞后距离变化率分别为10%、14%、13%,均小于15%,且不受排肥边界形状的影响。虽然本试验在水泥路面上进行,但各排肥器通过位置信息触发排肥,各行独立控制性能主要受处方图边界解析精度、定位精度和作业车速影响,该试验结果能反映田间作业情况。
综上可知,该变量施肥机机有较好的各行独立控制性能,能够较好适应复杂施肥边界形状,可减少施肥过程中田块边缘和垄沟边界的肥料浪费,为进一步细化田间区域施肥精度提供可能。
4 结 论
1)基于CAN总线通讯技术,设计了一种排肥单体独立控制的双变量施肥控制系统,建立了系统控制模型,并对排肥单体的定位方法进行了分析,搭建了变量施肥机控制系统的硬件,开发了上位机操作软件。
2)为了检验该双变量施肥控制系统的作业性能,进行了各行排肥量一致性排肥试验和排肥量控制控制准确性试验。试验结果表明,在排肥轴转速10~60 r/min的区间内,各行平均排肥量一致性变异系数为3.35%,各行之间排肥均匀、稳定;对于同一目标排肥量350 kg/hm2,排肥量控制精度随着作业车速的提高而提高,排肥量控制精度在车速为7 km/h时达到97.6%,该系统具有较好的排肥稳定性和准确性。
3)为了检验该双变量施肥控制系统的各行独立控制性能,开展了直径为2.5 m的半圆形凹、凸、S形3种不同形状的施肥边界的排肥试验。结果表明,在作业车速5 km/h的条件下,各行排肥器排肥位置的滞后距离变化率均小于15%,且不受施肥边界形状的影响。该排肥单体独立控制的双变量施肥控制系统能够实现各行独立控制,能够适应复杂施肥边界形状,减少肥料在垄沟边界的浪费,可根据实际作业需求调整工作的排肥器个数,进而调节作业幅宽,实现跨处方图栅格作业,为玉米基肥变量施用装备的研发提供参考。
[1] 赵春江,薛绪掌,王秀,等. 精准农业技术体系的研究进展与展望[J]. 农业工程学报,2003,19(4):7-12.
Zhao Chunjiang, Xue Xuzhang, Wang Xiu, et al. Advance and prospects of precision agriculture technology system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(4): 7-12. (in Chinese with English abstract)
[2] 陈静,吴永常,陈立平,等. 基于部分预算法的玉米大田变量施肥经济效益分析[J]. 农业工程学报,2017,33(19):141-146.
Chen Jing, Wu Yongchang, Chen Liping, et al. Economic benefit analysis of variable-rate fertilization technology in maize (Zea mays) field based on partial budget analysis method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(19): 141-146. (in Chinese with English abstract)
[3] 冯靖仪. 稻田作物生产的碳足迹及化肥减施的温室气体减排潜力研究[D]. 杭州:浙江大学,2020.
Feng Jingyi. Study on Carbon Footprint of Crop and Greenhouse Gas Emission Reduction Potential of Chemical Fertilizer Reduction in Rice Field[D]. Hangzhou: Zhejiang University, 2020. (in Chinese with English abstract)
[4] Balafoutis A, Beck B, Fountas S, et al. Precision agriculture technologies positively contributing to GHG emissions mitigation[J]. Farm Productivity and Economics. Sustainability, 2017, 9(8): 1339.
[5] Shi Y, Hu Z, Wang X, et al. Fertilization strategy and application model using a centrifugal variable-rate Fertilizer Spreader[J]. International Journal of Agricultural and Biological Engineering, 2018, 11(6): 41-48.
[6] 宋帅帅,段洁利,邹湘军,等. 基于香蕉根系分布形态的变量排肥器参数优化与试验[J]. 农业工程学报,2020,36(6):11-18.
Song Shuaishuai, Duan Jieli, Zou Xiangjun, et al. Parameter optimization and test of variable fertilizer apparatus based on root distribution pattern of bananas[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(6): 11-18. (in Chinese with English abstract)
[7] 白由路. 国内外施肥机械的发展概况及需求分析[J]. 中国土壤与肥料,2016(3):1-4.
Bai Youlu. Development and demand analysis of fertilizing machinery at home and abroad[J]. China Soil and Fertilizer, 2016(3): 1-4. (in Chinese with English abstract)
[8] 陈立平,黄文倩,孟志军,等. 基于CAN总线的变量施肥控制器设计[J]. 农业机械学报,2008,39(8):101-104.
Chen Liping, Huang Wenqian, Meng Zhijun, et al. Design of variable rate fertilization controller based on CAN bus[J]. Transaction of the Chinese Society for Agricultural Machinery, 2008, 39(8): 101-104. (in Chinese with English abstract)
[9] 刘阳春,张小超,伟利国,等. 一种变量施肥技术的实现及其台架试验[J]. 农业机械学报,2010,41(9):159-162.
Liu Yangchun, Zhang Xiaochao, Wei Liguo, et al. Design and experiment of a variable rate fertilization control system[J]. Transaction of the Chinese Society for Agricultural Machinery, 2010, 41(9): 159-162. (in Chinese with English abstract)
[10] 张汉林. 电动变量施肥控制系统的设计与试验研究[D]. 大庆:黑龙江八一农垦大学,2017.
Zhang Hanlin. Design and Test of a Variable Rate Fertilization Control System[D]. Daqing: Heilongjiang Bayi Agricultural University, 2017. (in Chinese with English abstract)
[11] 苑进,刘成良,古玉雪,等. 基于相关向量机的双变量施肥控制序列优化[J]. 农业机械学报,2011,42(S1):184-189.
Yuan Jin, Liu Chengliang, Gu Yuxue, et al. Bivariate fertilization control sequence optimization based on relevance vector machine[J]. Transactions of The Chinese Society for Agricultural Machinery, 2011, 42(S1): 184-189. (in Chinese with English abstract)
[12] 刘成良,苑进,刘建政,等. 基于ARM和DSP的双变量施肥控制系统设计与试验[J]. 农业机械学报,2010,41(S):233-238.
Liu Chengliang, Yuan Jin, Liu Jianzheng, et al. ARM and DSP-based bivariable fertilizing control system design and implementation[J]. Transaction of the Chinese Society for Agricultural Machinery, 2010, 41(S): 233-238. (in Chinese with English abstract)
[13] 吴金林. 双变量施肥机结构及液压调控系统设计[D]. 石河子:石河子大学,2014.
Wu Jinlin. Study on Structure and Hydraulic Step-less Speed Control of the Variable Rate Fertilizer applicator[D]. Shihezi: Shihezi University, 2014. (in Chinese with English abstract)
[14] Su N, Xu T, Song L, et al. Variable rate fertilization system with adjustable active feed-roll length[J]. International Journal of Agricultural and Biological Engineering, 2015, 8(4): 19-26.
[15] 宿宁. 精准农业变量施肥控制技术研究[D]. 合肥:中国科学技术大学,2016.
Su Ning. Precision Agricultural Variable Rate Fertilization Control Technology Research[D]. Hefei: University of Science and Technology of China, 2016. (in Chinese with English abstract)
[16] 戚武振. 智能稻麦播种机变量施肥系统设计与研究[D]. 泰安:山东农业大学,2018.
Qi Wuzhen. Design and Experiment for Smart Rice and Wheat Variable Rate Fertilizer Applicator[D]. Taian: Shandong Agricultural University, 2018. (in Chinese with English abstract)
[17] 戚武振,王金星,刘双喜,等. 稻麦变量施肥机控制系统设计与试验[J]. 农机化研究,2019,50(8):72-79.
Qi Wuzhen, Wang Jinxing, Liu Shuangxi, et al. Design and experiment of control system for rice and wheat variable rate fertilizer applicator[J]. Journal of Agricultural Mechanization Research, 2019, 50(8): 72-79. (in Chinese with English abstract)
[18] Alameen A, Al-Gaadi K, Tola E. Development and performance evaluation of a control system for variable rate granular fertilizer application[J]. Computers and Electronics in Agriculture, 2019, 160: 31-39.
[19] 施印炎,陈满,汪小旵,等. 稻麦精准追肥机执行机构的设计与试验[J]. 华南农业大学学报,2015,36(6):119-124.
Shi Yinyan, Chen Man, Wang Xiaochan, et al. Design and experiment of precision fertilizer applicator actuator of rice and wheat[J]. Journal of South China Agricultural University, 2015, 36(6): 119-124. (in Chinese with English abstract)
[20] 陈满,施印炎,汪小旵,等. 基于光谱探测的小麦精准追肥机设计与试验[J]. 农业机械学报,2015,46(5):26-32.
Chen Man, Shi Yinyan, Wang Xiaochan, et al. Design and experiment of variable rate fertilizer applicator based on crop canopy spectral reflectance[J]. Transaction of the Chinese Society for Agricultural Machinery, 2015, 46(5): 26-32. (in Chinese with English abstract)
[21] 陈满. 基于近地光谱技术的冬小麦精准变量施肥机的研制[D]. 南京:南京农业大学,2016.
Chen Man. Precision Variable Fertilizer Applicator for Winter Wheat based on Canopy Spectral Reflectance[D]. Nanjing: Nanjing Agricultural University, 2016. (in Chinese with English abstract)
[22] 汪小旵,陈满,孙国祥,等. 冬小麦变量施肥机控制系统的设计与试验[J]. 农业工程学报,2015,31(S):88-92.
Wang Xiaochan, Chen Man, Sun Guoxiang, et al. Design and test of control system on variable fertilizer applicators for winter wheat[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(S): 88-92. (in Chinese with English abstract)
[23] Fulton J, Shearer S, Higgins S, et al. A method to generate and use as-applied surfaces to evaluate variable-rate fertilizer applications[J]. Precision Agriculture, 2013, 14(2): 184-200.
[24] 张季琴,刘刚,胡号,等. 双变量螺旋外槽轮排肥器控制序列对排肥性能的影响[J]. 农业机械学报,2020,51(S):137-144.
Zhang Jiqin, Liu Gang, Hu Hao, et al. Influence of the control sequence of the spiral fluted roller fertilizer distributor on fertilization performance[J]. Transactions of The Chinese Society of Agricultural Machinery, 2020, 51(S): 137-144. (in Chinese with English abstract)
[25] 张书慧,马成林,杜巧玲,等. 精确农业自动变量施肥机控制系统设计与实现[J]. 农业工程学报,2004,20(1):113-116.
Zhang Shuhui, Ma Chenlin, Du Qiaoling, et al. Design of control system of variable rate fertilizer applicator in precision agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(1): 113-116. (in Chinese with English abstract)
[26] 丁友强,杨丽,张东兴,等. 基于GPS测速的电驱式玉米精量播种机控制系统[J]. 农业机械学报,2018,49(8):42-49.
Ding Youqiang, Yang Li, Zhang Dongxing, et al. Control system of motor-driving maize precision planter based on GPS speed measurement[J]. Transaction of the Chinese Society for Agricultural Machinery, 2018, 49(8): 42-49. (in Chinese with English abstract)
[27] He X, Ding Y, Zhang D, et al. Development of a variable-rate seeding control system for corn planters Part I: Design and laboratory experiment[J]. Computers and Electronics in Agriculture, 2019, 162: 318-327.
[28] 何亚凯,杨学军,翟长远,等. 集排风送式玉米分层追肥机设计与试验[J]. 农业机械学报,2020,51(11):1-11.
He Yakai, Yang Xuejun, Zhai Changyuan, et al. Design and Experiment of air-assisted layered fertilization machine of centralized distributing for corn[J]. Transaction of the Chinese Society for Agricultural Machinery, 2020, 51(11): 1-11. (in Chinese with English abstract)
[29] 杨硕,王秀,高原源,等. 电动机驱动玉米气吸排种器总线控制系统设计与试验[J]. 农业机械学报,2019,50(2):57-67.
Yang Shuo, Wang Xiu, Gao Yuanyuan, et al. Design and experiment of motor driving bus control system for corn vacuum seed meter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 57-67. (in Chinese with English abstract)
[30] He X, Ding Y, Zhang D, et al. Development of a variable-rate seeding control system for corn planters Part II: Field performance[J]. Computers and Electronics in Agriculture, 2019, 162: 309-317.
Development of bivariate fertilizer control system via independent control of fertilizing unit
Zhang Jiqin1,2, Liu Gang1,3※, Hu Hao1,3, Huang Jiayun1,3
(1.,,,100083,;2.,,750021,;3.,,,100083,)
Current variable-rate fertilizer applicator generally drives all the fertilizer distributers through the same drive shaft at a fixed working width. Most fields are in an irregular shape during the operation of fertilization, particularly unsuitable for an integer multiple of working width. Severe overlap of working areas normally occurs at the edge of the field, resulting in a large amount of waste of fertilizer at the boundary. In addition, the cross-regional or cross-prescription raster operations are still lacking in the current fertilizer applicator. In this study, a bivariate fertilizer control system was designed to implement the independent control of fertilizer discharging unit in a modified applicator for corn fertilizing. The whole machine was composed mainly of a real-time kinematic (RTK) and global navigation satellite system (GNSS) positioning, a bivariate fertilization control system, and an executing device. Firstly, a calibration test was conducted at different active-feed roll lengths and rotational speeds of the drive shaft. A quadratic polynomial fitting was then used to obtain the bivariate control model for the distributing monomer of fertilizer. Specifically, the coefficient of determination reached 0.9992 in the fitting equation, indicating a high level of fitting. Secondly, an in-depth analysis was conducted for the positioning of each fertilization unit. Thirdly, the hardware and software of the control system were developed using the CAN bus communication to realize the collection, analysis and storage of GNSS information, the operation parameter setting, and the independent control of discharging unit. The hardware was composed of a GNSS navigation device, an industrial personal computer, a servo/stepping motor, a micro-controller, and an electronic ruler. The software was performed on a VS2012 platform with SQL2008 database using C# language. Three function modules were included: the communication, setting of working parameters, and working control in the manual and automatic mode. Finally, a systematic evaluation was completed on the comprehensive performance of the bivariate fertilizer control system, including the consistency of fertilizer discharge in each row, the accuracy of fertilization rate at different vehicle speeds, and independent control performance in each row. The results showed that the maximum coefficient of variation (CV) was 5.37% at the driving speed of 10 r/min within the range of 10-60 r/min of fertilizer shaft speed, as the speed of the driving shaft increased. The minimum CV of each row dropped to 2.99% at the driving speed of 55 r/min, indicating the average CV of consistency was 3.35%. At the target fertilizer rate of 350 kg/hm2, the accuracies of fertilization control were 93.2%, 96.75%, and 97.60% under the working speed of 3, 5, and 7 km/h, respectively. The operating speed was generally around 4-12 km/h in the variable rate fertilizer applicator, meeting the national standard accuracy of fertilizer application. Three experiments were conducted on the road fertilization with irregular boundary shapes, such as the concave, convex and S boundary. The lag distance change rate fertilization correlated to the working width was less than 15% on average, indicating no influence by the shape of fertilization boundary. More specifically, the variation ratios of lag distance were 10%, 14%, and 13% at the concave, convex and S boundary, respectively. This applicator can be expected to well simulate the fertilization boundary shape, due to its high stability of fertilization, and control accuracy.The bivariate fertilizer applicator with independent control of fertilization monomer can realize the independent control of each row, suitable for the shape of complex fertilization boundary, while reducing fertilizer wastes at the boundary of the furrow. The finding can provide a potential technical reference for the innovative development of variable-rate equipment for basal fertilizer in corn production.
agricultural machinery; corn; basic fertilizer; bivariate; fertilizing unit; independent control
10.11975/j.issn.1002-6819.2021.10.005
S224.2
A
1002-6819(2021)-10-0038-08
张季琴,刘刚,胡号,等. 排肥单体独立控制的双变量施肥控制系统研制[J]. 农业工程学报,2021,37(10):38-45.doi:10.11975/j.issn.1002-6819.2021.10.005 http://www.tcsae.org
Zhang Jiqin, Liu Gang, Hu Hao, et al. Development of bivariate fertilizer control system via independent control of fertilizing unit[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(10): 38-45. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.10.005 http://www.tcsae.org
2020-12-19
2021-04-18
国家重点研发计划项目(2017YFD0700503)
张季琴,讲师,博士生,研究方向为精细农业关键技术。Email:zhjq2010jasmine@163.com
刘刚,教授,博士生导师,研究方向为电子信息技术在农业中的应用。Email:pac@cau.edu.cn
猜你喜欢
故事作文·高年级(2022年2期)2022-02-24
储能科学与技术(2022年2期)2022-02-19
煤(2022年2期)2022-02-17
纺织科学研究(2021年7期)2021-08-14
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
现代装饰(2020年4期)2020-05-20
戏剧之家(2018年21期)2018-10-19
三联生活周刊(2017年48期)2017-11-25