一种复杂环境下改进的SAR图像双边CFAR舰船检测算法
2021-09-02 09:16艾加秋曹振翔毛宇翔汪章怀王非凡
雷达学报 2021年4期
艾加秋 曹振翔 毛宇翔 汪章怀 王非凡 金 兢
①(合肥工业大学计算机与信息学院 合肥 230009)
②(合肥工业大学智能互联系统安徽省实验室 合肥 230009)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种能够对陆地和海洋进行全天时、全天候监测的有源雷达。与光学图像相比,SAR图像受时间和环境因素的影响较小。因此,它们更加适合用于舰船目标的检测与识别[1–5]。SAR自动目标识别(Automatic Target Recognition,ATR)系统主要包括预处理、预筛选、识别和分类等几个模块[6]。其中,预处理模块主要就是通过几何校正、噪声滤除和多视处理等操作为后续的模块提供高质量的SAR图像;预筛选模块主要是从广阔的海洋场景中尽可能地提取感兴趣的目标,并将干扰目标去除;而识别和分类模块主要是通过特征提取、目标分类等操作,对目标感兴趣区域(Region Of Interest,ROI)进行处理,并最终得到舰船目标的型号、大小和类别等信息。而在它们当中,有效的预筛选有助于在后续操作中节省大量的算力和时间,是十分重要的一环[7,8]。而在预筛选模块中,基于恒虚警率(Constant False Alarm Rate,CFAR)的舰船目标检测算法的应用最为广泛。目前,海面舰船目标检测主要存在两个方面的难点:一是在复杂场景下(例如旁瓣、方位模糊、幻影、防波堤、强相干斑噪声和多目标环境等[9])对目标进行精确高效的检测比较困难;二是对受到自身的散射特性、环境和雷达设备参数等影响的弱目标的检测存在明显的性能瓶颈。本文将分别从这两个方面展开分析。
几十年来,经过各国科研人员的不懈努力,许多经典的CFAR检测器被提出。其中,单元平均CFAR检测器(Cell Averaging CFAR,CA-CFAR)[10]、双参数CFAR(Two Parameter CFAR,TP-CFAR)[10]、基于对数正态分布的CFAR(Log Normal distribution based CFAR,LN-CFAR)[11]、基于广义伽马分布的CFAR(Generalized Gamma CFAR,GGCFAR)[12]、基于K分布的CFAR(K-distribution based CFAR,K-CFAR)[13]、基于α稳定分布的CFAR(Alpha Stable distribution based CFAR,AS-CFAR)[14]和基于G0分布的CFAR(G0 distribution based CFAR,G0-CFAR)[15]检测器在杂波背景为均质的情况下都能达到较好的检测性能。但是,实际的SAR图像目标检测的应用场景较为复杂,可能出现的旁瓣、方位模糊、幻影、防波堤、强相干斑噪声和多目标等[9]均会对检测结果产生影响。这些影响表现为高强度异质点对背景窗口中的杂波样本造成污染,导致参数估计结果较高,使得统计模型与实际模型有所不同,从而产生大量漏检。解决该问题的主流方法是先将背景窗口中的干扰像素点完全去除,之后使用实际的海杂波样本来进行参数估计和统计建模。为提升在复杂环境下的检测性能,许多优秀的基于数据审查的CFAR检测器[16–19]被提出。例如,由Blake s[18]所提出的有序统计量CFAR (Order Statistic CFAR,OS-CFAR)通过事先获得干扰目标数的先验信息,删除高强度异质点,以提高检测器在多目标环境下的抗干扰能力。但是,OS-CFAR在杂波边缘混乱的情形下会出现大量虚警,并且在实际操作过程中,实时获取先验信息有一定难度。为了同时实现良好的鲁棒性和高效率,Ai等人[20]提出了一种基于自适应截断杂波统计的双参数CFAR (Truncated Statistics Log Normal CFAR,TS-LNCFAR)检测器,TS-LNCFAR使用自适应阈值从局部参考窗口中的样本里去除高强度异质点,然后使用截断后的杂波进行更为精确的参数估计,并使用对数正态分布进行精确建模。此外,基于相同的思想和理论,离群值鲁棒CFAR (Outliers Robust CFAR,OR-CFAR)[21]检测器也应用了自适应截断杂波统计方法,它可以实现对高斯分布的精确建模。但是,无论是TS-LNCFAR还是OR-CFAR,检测性能都依赖于截断深度的设置。较小的深度虽然可以完全去除高强度异质点,但是大量真实的海杂波样本也会被去除,尽管检测率提升了很多,但是观察到的虚警率会急剧增加。相反,较大深度不能完全消除高强度异质点,它们会导致很多目标漏检。
此外,上述所提到的所有方法都只用到图像的强度信息来进行目标检测。而随着先进的高分辨率SAR卫星(如TerraSAR-X、高分3号)的陆续发射,可以从图像中获取更多的信息[22],如舰船内部结构中像素点与像素点之间的空间关系。越来越多的研究人员都开始关注如何提取出这些空间特征并加以利用,以提升在复杂环境下的检测精度。Wang等人[23]提出了新的基于核密度估计的双边CFAR[24]检测器,它能够有效地利用高分辨率(High Resolution,HR) SAR图像中的空间信息。双边CFAR能够有效提升目标与杂波背景之间的对比度信息,并且在受强相干斑噪声或旁瓣影响的杂波环境下,也能达到较好的检测性能。然而,由于自身的散射特性、环境和传感器等影响,SAR图像中的一些目标会不可避免地出现明显的弱化现象,这些弱目标中的像素点与像素点之间的相似度相对较低[25–27],尤其是靠近目标的边缘区域。在这种情形下,由核密度估计器所算得的舰船目标的空间值会较小,并且与强度值相乘的合并值也会较小,从而导致检测结果中出现漏检;此外,双边CFAR在遇到复杂环境下非离散分布的、连续的高强度异质点时,核密度估计器计算出的空间信息会出现较多误差,这会导致由空间信息和强度信息融合所得的图像与实际图像的海况分布相差较远,从而导致检测结果中出现大量虚警。
针对上述问题,本文设计了一种复杂环境下改进的SAR图像双边CFAR舰船检测算法(Improved Bilateral CFAR,IB-CFAR)。首先,针对双边CFAR检测算法在遇到弱目标时容易发生漏检的问题,本文设计一种非均匀量化方法以提升弱目标内部的像素点间的相似度信息,从而提升舰船检测率;其次,针对双边CFAR在遇到连续的高强度异质点时,所得到的联合图像与实际图像的海况分布相差较远的问题,本文设计一种自适应强度、空间信息融合模型,将空间相似度、距离向和强度等信息进行融合,在不改变实际海况基本分布的基础上,最大限度地提升目标与周围杂波之间的对比度信息,在进一步提升检测率的同时,对舰船的结构信息进行精细化描述。最后,针对上述所提到的各类CFAR检测器无法有效去除背景窗口中的高强度异质点的问题,本文在OR-CFAR的基础上,设计出一种基于自适应截断深度的杂波截断方法,在有效去除背景窗口中的高强度质点的同时,最大限度地保留真实海杂波样本以进行精确的参数估计和统计建模。IB-CFAR不仅很好地提高了复杂环境下舰船目标的检测率,有效保留了舰船目标的内部结构信息,同时还实现了较低的虚警率。
2 研究方法及原理
2.1 双边CFAR检测原理
双边CFAR[24]作为一种同时考虑图像的强度分布信息和空间分布信息的检测算法,在进行舰船目标检测之前,使用一种核密度估计方法[23]提取整幅图像中的每一个像素点与其周边像素点的相似度特征,之后将相似度特征与强度特征进行相乘得到组合特征以进行目标检测。其数学模型可以用式(1)来表示。


由于双边CFAR检测算法的提出是基于两个假设,第一,舰船目标在SAR图像中的像素点分布是连续的、集中的,并且像素点的强度值是较大的、相近的;第二,海杂波中高强度的干扰像素点的分布是不连续的、分散的;因此,在大部分非极端复杂的海况下,双边CFAR的组合分布模型都能够很好地提升目标与背景杂波之间的对比度,从而在获得一个较高检测率的同时保持一个较低的虚警率。
然而,在实际的目标检测过程中,不可避免地会遇到一些散射强度相对较弱的目标,这些弱目标中的像素点与像素点之间的相似度相对较低[1],尤其是靠近目标的边缘区域。在这种情形下,由核密度估计器所算得的舰船目标的空间值会较小,并且与强度值相乘的合并值也会较小,从而导致检测结果中出现漏检。如图1(a)–图1(c)所示,在图1(a)中用红色方框标出其中的一只弱目标,在双边CFAR的联合图像中,弱目标的边缘值要小于周边背景杂波的值。此外,双边CFAR在遇到复杂环境下非离散分布的、连续的高强度异质点时,就会发生由核密度估计器所算得的空间值过高的问题,这会导致联合图像与实际图像的海况分布相差较远,从而导致检测结果中出现大量虚警,如图1(b)和图1(c)所示。针对双边CFAR检测算法所遇到的上述问题,本文设计了相关的解决方案对它进行相应的改进。
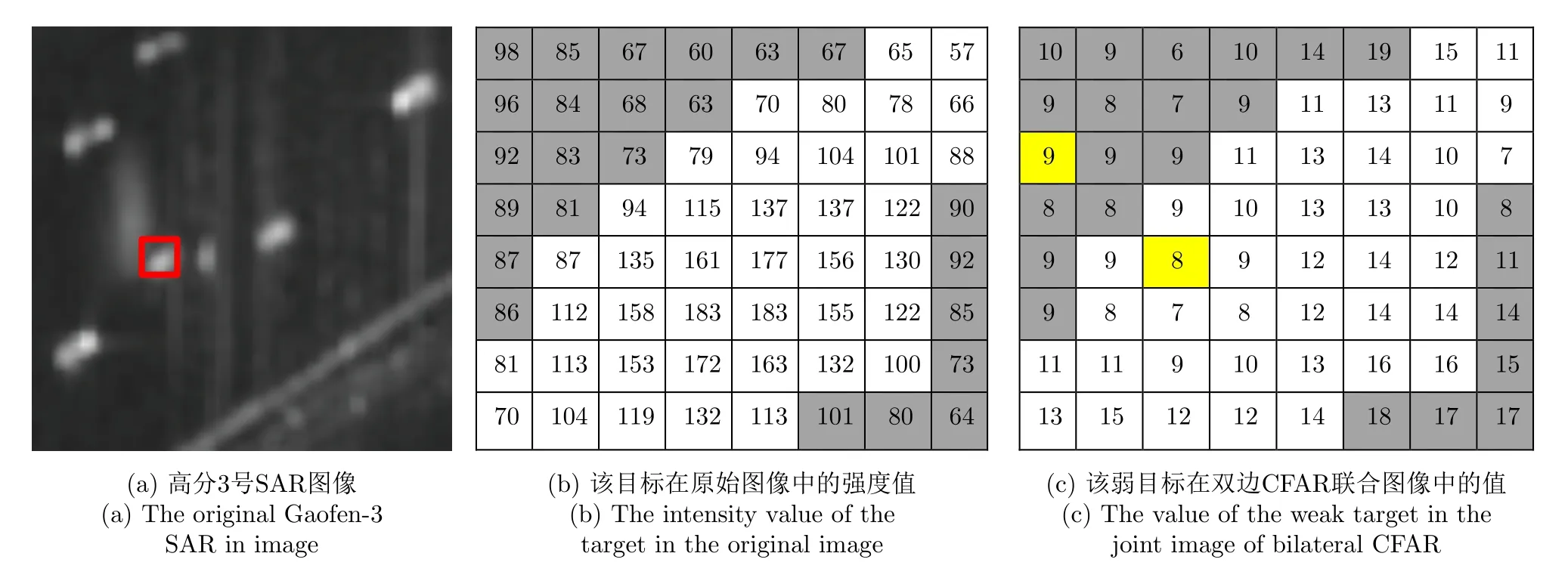
图1 弱目标在双边CFAR联合图像中的值与在原始图像中的强度值之间的对比Fig.1 The comparison between the value of weak target in the joint image of bilateral CFAR and the intensity value in the original image
2.2 IB-CFAR检测算法
IB-CFAR的检测思路具体如下:首先,对整幅图像进行高斯拟合,用非均匀量化方法对图像的强度进行层级划分;其次,使用自适应强度-空间域信息融合模型将强度信息、相似度信息和距离向信息进行融合,得到融合域图像;之后,用融合域图像计算全局方差,并通过每个滑动窗口中的样本计算局部方差,从而算得自适应截断深度;根据所得出的深度对局部窗口中的杂波样本进行截断,并使用最大似然估计(Maximum Likelihood Estimation,MLE)方法对截断后的样本进行精确的参数估计,再计算出检测阈值TD;最后,结合给定的虚警确定被测像素IT是属于目标还是属于背景。图2给出了IB-CFAR的检测流程图。

图2 本文所提IB-CFAR的检测流程图Fig.2 The proposed IB-CFAR detection flow chart
2.2.1 基于非均匀量化法的强度层级划分
针对双边CFAR检测器在遇到弱目标时容易发生漏检的问题,本文使用一种非均匀量化方法对图像先进行强度分级,以增强目标的相似度信息。首先,在假设海杂波是近似服从高斯分布的基础上[21],对输入的SAR图像进行高斯拟合,再使用拟合后的参数绘制高斯分布的累计分布函数图进行强度分级,本文选用累积分布函数来进行强度分级是因为对于整幅图像的像素来说,在映射的过程中不能出现明暗颠倒的情况,较亮的区域转换后依旧是较亮的,较暗的区域也依旧比较暗,同时要增加弱目标内部的像素点与像素点间的相似度,而累积分布函数是单调递增函数,可以很好地控制亮度值映射后的大小关系,此外,对于高斯分布的累积分布函数来说,在强度值高的区域和低的区域变化率较低,变化趋势较为平缓,而在强度值处于均值附近的区域变化率高,变化趋势较为陡峭,因此,如果将累积分布函数的y轴等分成N份,这样映射到x轴后就将整幅图像的像素点强度值非均匀地分成了LN级,如图3所示,其中,第LN级分得的像素点强度值跨度范围最大(图3中的黄色区域),这样即使是遇到低对比度目标时,也能有效地增强目标相似度信息。

图3 非均匀强度分级原理图,黄色区域代表第 LN级Fig.3 Schematic diagram of non-uniform strength grading,which yellow area represents the level N
通过对多幅包含弱目标的高分辨率SAR图像(其中包括高分3号、TerraSAR-X等不同类型的SAR图像)进行实验,分别求取在不同LN分级下的各类衡量检测性能的指标,如图4所示,各检测性能的指标的定义在3.3节中给出。得出LN在取16和32的时候效果最好,这是因为当LN取较小值的时候,相当于将图像进行二值化处理,对背景杂波的划分不够精细,导致出现大量虚警;而当LN取较大的值时,如128或是256,则相当于没有量化,导致对弱目标的检测出现漏检,如图5(b)所示。因此,对于不同类型的SAR图像,本文都将LN的值取一个折中值16。
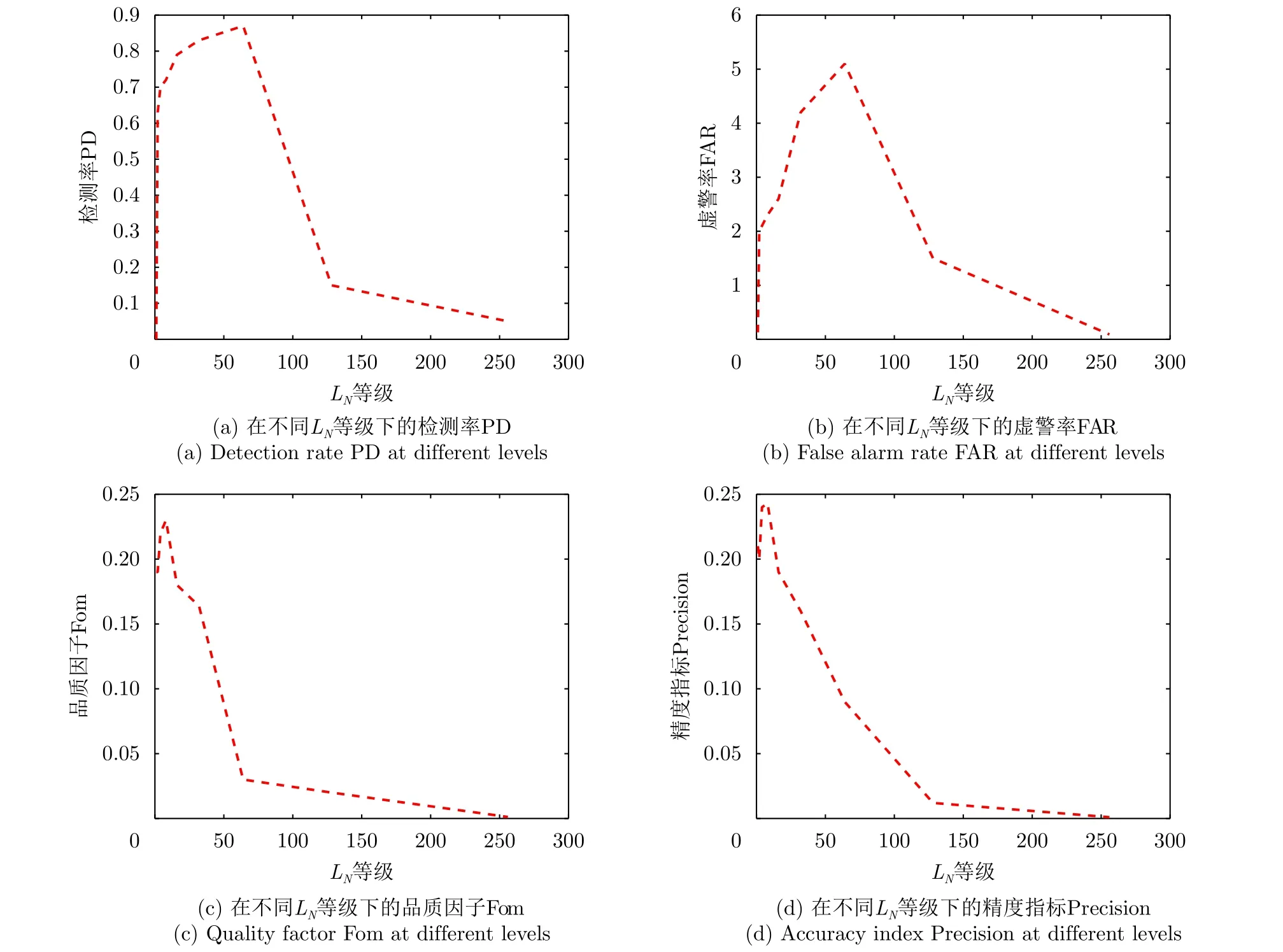
图4 各项性能指标在不同 LN等级下的变化曲线Fig.4 Variation curves of various performance indicators at different levels
如果在原始的16位SAR幅度图像上直接求取相似度信息,则会得到图5(b)中的结果,这是因为在这些弱目标的内部,像素点与像素点之间的相似度相对较低[25–27],由核密度估计器所算得的舰船目标的空间值会较小,并且与强度值相乘的合并值也会较小,从而导致检测结果中出现漏检。从图1(b)、图1(c)中能够清楚地看到,使用原始SAR幅度图像直接求取相似度信息的双边CFAR的联合图像中,弱目标的边缘值要小于周边背景杂波的值,因此必然会导致后续的漏检。而使用了非均匀量化之后,即使是遇到低对比度目标时,也能有效地增强目标内部的相似度信息,从而能够有效地提升检测率,如图5(a)、图5(b)和图5(c)所示,图5(a)中包含多只密集分布的弱目标。

图5 非均匀量化方法增强弱目标内部的相似度信息Fig.5 Non-uniform quantization method enhances similarity information within weak targets
在对整幅图像的强度值进行非均匀量化后,将相邻像素点之间的层级差值记为DoLi,DoLi代表相邻像素点间的相似度差异性。

其中,Lcentre_pixel为每一个滑动窗口中的中心像素点的层级,而Laround_pixel为滑动窗口中除中心像素点以外的其他像素点的层级。
2.2.2 自适应强度-空间域信息融合
针对双边CFAR在遇到连续的高强度异质点时,所得到的联合图像与实际图像的海况分布相差较远的问题,本文设计了一种自适应强度、空间信息融合模型,将空间相似度、距离向和强度等信息进行融合,在不改变实际海况基本分布的基础上,最大限度地提升目标与周围杂波之间的对比度信息。文献[24]用核密度估计量来确定目标的空域分布。核密度估计量被定义为

使用标准正态函数作为核函数后,可以转化为

其中,fh(x)表示x与xj相似度差异性的累加。
在一些非极端复杂的海况下,即使存在很多的强相干斑噪声或是一些离散分布的高强度异质点,使用核密度估计器的双边CFAR的组合分布模型都能够很好地提升目标与背景杂波之间的对比度,从而在获得较高的检测率的同时保持较低的虚警率,如图6所示,其中,TerraSAR-X图像中有一艘大船,有着强相干斑噪声;并且TerraSAR-X图像的三维图中,目标几乎淹没在背景杂波之中。

图6 在包含强相干斑噪声环境下双边CFAR对杂波的抑制效果Fig.6 Clutter suppression effect of bilateral CFAR in the presence of strong speckle noise
双边CFAR检测算法认为船只目标的像素是连续、集中分布的,故这些像素对应的fh(x)值较大,而海杂波像素的分布是分散的,fh(x)的值较小。所以,双边CFAR能够在高强度异质点分布离散的情况下表现较好。然而,如图7(a)、图7(b)所示,在实际情况中高强度异质点往往分布密集。在这种情况下,双边CFAR的核密度估计器所计算得到的异质点的空间值过大,从而使得与强度值相乘的合并值过大,最终会对检测结果产生较大影响,如图7(c)所示,在图7中,原始图像中包含幻影和防波堤,且舰船目标内部像素点与像素点间的相似度很低。
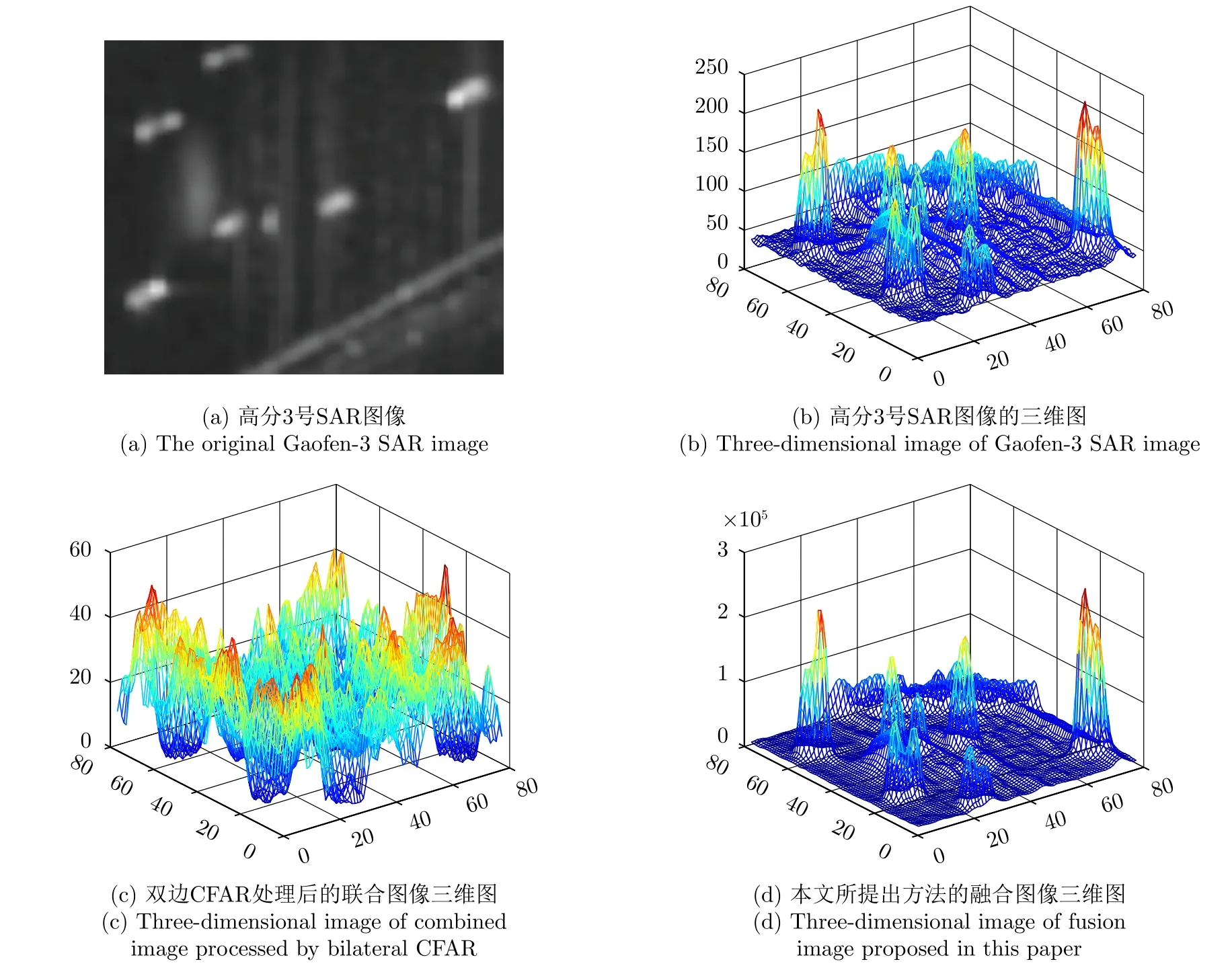
图7 双边CFAR和本文所提IB-CFAR在高强度异质点分布密集的背景下处理得到的融合图像对比图Fig.7 The comparison of the fusion images of bilateral CFAR and IB-CFAR under the background of dense distribution of high-intensity heterogeneous points
此外,图像中像素点与像素点间的空间信息不仅仅只包含相似度信息,同时还包含几何距离向信息。两个相邻像素点更有可能来自同一类型(目标、背景或连片的异质点)。因此,引入距离向信息与相似度信息构成联合空间信息,可以更加精确地表征像素点间的空间关系。
受强度-空间域CFAR (IS-CFAR)[28]检测算法的启发,本文将强度与空间信息综合起来进行处理,设计了一种自适应强度-空间信息融合模型

其中,F(∗)为自适应强度-空间信息融合值,I(∗)为强度值,Nw为融合窗口大小,(a,b)和 (i,j)分别为融合窗口的中心像素点坐标和其他像素点坐标,如式(8)所示,R(i,j)为中心像素点与窗口中其他像素点的欧氏距离。

本文设计的自适应强度-空间信息融合模型能够很好地提高双边CFAR的鲁棒性,因为该模型并不是只由空间信息来直接决定最终的融合值,而是将每一个像素点与周边像素点的相似度值、几何距离值和强度值综合起来处理,通过此模型可以避免高强度异质点所算得的空间值过大的问题,并最大限度地提升舰船目标和背景之间的对比度关系,如图7(d)和图8(b)所示,图8为TerraSAR-X图像的三维图,目标几乎淹没在背景杂波之中。在图8(b)中,强相干斑噪声和离散分布的高亮异质点都能被很好地抑制;而在图7(d)中,连续的高亮异质点虽然无法完全被抑制,但也得到了相应的改善,对比度也提升了很多,并且此模型计算出来的融合图并没有出现高亮异质点算出的融合值过大的问题。总的来说,自适应强度-空间信息融合模型不仅能在有着强相干斑噪声的背景下,保持很好的杂波抑制性能,同时,在高强度异质点分布密集的背景下,也能取得较好的抑制效果。

图8 在包含强相干斑噪声环境下所提出的IB-CFAR对杂波的抑制效果Fig.8 Clutter suppression effect of IB-CFAR in the presence of strong speckle noise
2.2.3 基于杂波截断的参数估计方法
由于传统的CFAR检测器无法解决在复杂环境下高强度异质点(例如相邻舰船目标、方位模糊、旁瓣、幻影和防波堤)的干扰问题,一旦高强度异质点过多且连成片,则会导致局部参考窗口中的参数估计值过高,从而导致出现大量虚警。解决异质点干扰问题的常用方法是选择一个合理的阈值,以消除背景窗口中的高强度异质点[11–13],假设背景窗口中待判断的样本值为IB,则判断它是否应该被去除的规则为

其中,α为截断深度,μ和σ分别为局部参考窗口中的均值和方差,DT为计算出的截断阈值。之后可以对截断后的杂波样本使用最大似然估计器来估计均值和标准差。因此,截断深度α的选择非常重要。如果截断深度选取太高,则虽然可以很好地保留真实的杂波样本,但却不能完全消除干扰异质点。如果截断深度选取太低,则虽然可以彻底消除异常值,但是也会将真实的杂波样本点去除,这会使得参数估计的准确度降低。受TP-CFAR和OR-CFAR的启发,本文设计了一种基于自适应截断深度的核函数来对局部窗口中的杂波样本进行截断

其中,varw和 varh分别是局部参考窗口和整个图像的方差,由于对于给定的SAR图像来说,全局方差是恒定的,因此截断深度作为以局部标准差为自变量的单调递减函数,通过式(11)可以自适应地调整截断深度α,避免了OR-CFAR中手动选择固定值的状况。如图9(e)所示,如果局部参考窗口包含许多高强度异质点,则通过式(11)所得到的截断深度将变为一个较低的值。此时根据式(10)的判别规则可以实现干扰像素点的完全剔除,而真实的杂波样本则较大程度上得到维持。相反,如果局部参考窗口包含的干扰像素点较少,则此时的截断深度为较大值,以此最大限度地保留真实杂波样本。

图9 OR-CFAR和本文所提IB-CFAR在高强度异质点环境下对异质点进行杂波截断的性能评估Fig.9 The high-intensity outliers elimination performance evaluation of OR-CFAR and the proposed IB-CFAR
针对利用截断后样本进行参数估计的问题,本文参考文献[13]中的内容。假设截断后的杂波样本则通过最大似然估计器获取的估计统计量平均值μB和标准差σB为
总的来说,所提出的IB-CFAR检测算法可以通过以下几个步骤实现:
(1) 对输入的SAR图像进行高斯拟合,再使用拟合后的参数绘制高斯分布的累计分布函数图进行强度分级;
(2) 在融合窗口中,通过式(4)计算中心像素点的等级与周边像素点之间的相似性DoLi,并计算中心像素点与周边像素点之间的几何距离R(i,j);根据自适应融合模型式(7)将得到强度-空间信息融合域图像;
(3) 通过式(11)得出每一个局部窗口中的自适应截断深度α,再使用α进行杂波截断;之后通过式(12)和式(13)进行参数估计,并建立统计模型。假设局部背景窗口中的待检测样本点为IU,则CFAR决策规则可以通过式(14)实现

如果输入像素的值满足式(14),则它被判定为目标像素,否则为背景像素。其中TC是标称化因子,它和Pfa的关系满足

其中,φ()是标准正态分布的累积分布函数(Cumulative Distribution Function,CDF)。
3 实验结果与分析
为了验证所提出的IB-CFAR检测器在复杂环境下(例如拥挤的港口或繁忙的运输线)的有效性,本文使用的数据集为高分3号SAR图像以及TerraSAR-X图像,数据的详细信息如表1所示。考虑到实际的运算效率,本文采用整幅SAR图像中的局部区域作为实验对象,具体区域如图10、图11和图12中以白框标记的区域所示。其中,图10是具有30个密集分布的舰船目标的非匀质海况,其中包括幻影、防波堤和方位模糊等干扰因素;图11中包含幻影、方位模糊和4条船只,其中一条大船有着清晰的结构信息,图12是在非均质海况下的高分3号SAR图像,有25只密集分布的舰船目标。实验编程环境为MATLAB R2018a(9.4.0.813654),计算机处理器为intel(R) core(TM) I7-4790 CPU@3.60 GHz。

图12 2018年9月1日,高分3号在FSI模式下获得的长江入海口非均匀海况下的SAR图像Fig.12 Gaofen-3 test image of the heterogeneous open sea of Yangtze River Estuary acquired by the FSI mode on September 1,2018

表1 实验中所使用到的SAR图像的详细信息Tab.1 Details of SAR images used in the experiment

图10 2017年2月25日,高分3号在UFS模式下获得的上海港附近海域的SAR图像Fig.10 Gaofen-3 test image of the homogeneous sea area near Shanghai harbor acquired by UFS mode on February 25,2017

图11 2009年7月31日,TerraSAR-X在SM模式下所获得的巴拿马运河地区的高分辨率、多视、HH极化SAR图像Fig.11 High-resolution,multi-look,HH polarized SAR image of the Panama Canal region acquired by the X-band TerraSAR SM mode on July 31,2009
3.1 参数设置
本实验中各类CFAR检测器所使用到的所有参数设置如下:
(1) 本次实验中所有CFAR检测器的背景窗口尺寸都设置为舰船长度的2倍左右[4,10],为 31×31,并且测试窗口大小都设置为1×1;此外,将CA-CFAR,TP-CFAR,K-CFAR,双边CFAR和IS-CFAR的保护窗口大小都设置为15×15。PFA大小也都设置为10–8。
(2) 考虑到实验的严谨性,IB-CFAR的融合窗口大小设置成和IS-CFAR论文中设置的一样,为3×3,划分强度等级个数N取16;此外,双边CFAR也设置成其论文中所设置的最佳窗口大小,为7×7。
(3) 由于IS-CFAR在合并强度-空间信息的时候,需要手动地设置权重系数k和衰减系数α,本文将这两个参数设置为其论文中所提到的最佳参数范围中的一个值,即k取[3,5]中的一个值,α取[1.5,1.8]中的一个值。
3.2 各CFAR检测器的实验结果对比
图13–图16为在复杂环境下实现的各类CFAR检测器的检测结果,其中,图15的原始图像有着一艘结构清晰的大型舰艇,3艘小型舰艇目标,并且包含旁瓣和幻影;图16包含密集分布的25个目标,并且图像背景为非均匀海况。传统的CFAR检测器,如CA-CFAR,TP-CFAR以及LN-CFAR等因为设置的保护窗口并不能很好地解决非均匀环境下的异质点干扰,对背景窗口中所有像素点的参数估计值会过高,于是便会发生漏检,如图13(c)–图13(f)所示。其中,红色的圈将漏检的舰船目标和检测不完整的舰船目标标出。而双边CFAR先用核密度估计来获得空间信息,之后再将空间分布与强度分布直接相乘再取均值得到组合分布,但是,对于复杂背景环境下,因为背景中有大量连片的高强度异质点且舰船样本相似度低,导致核密度估计值较大;加上高强度异质点的像素值也高,得到的合并值也相对较高。这样就导致了大量的漏检和虚警,如图13(g)和图15(g)所示。而IS-CFAR主要解决了舰船样本对比度低的问题,由于先把255个灰度级等份压缩到了16个等级,0~15为第1级,235~255为第16级,之后再计算16个等级之间的相似度,并手动设置权重参数,给予相似度高的像素点以高权重,这样可以很好地提升检测率。但是,和双边CFAR一样,IS-CFAR无法解决连片异质点的干扰问题,因此会出现不少虚警;此外,由于对合并之后的图像使用的是TP-CFAR,所以会发生和TP-CFAR相同的问题,当遇到舰船目标离得很近的情况,也是会发生漏检的问题。
本文所提IB-CFAR使用了一种非均匀量化方法对图像进行强度分级,提高目标的相似度信息从而提升了检测率;此外,由于在非均匀环境下使用一种基于深度自适应的杂波微调方法,该微调深度是根据局部与全局方差的对比度自适应获得,使用自适应截断深度的IB-CFAR可以有效地去除高强度离群值,同时可以极大地保留真实的杂波样本,因此它可以进一步提升在复杂环境(指目标分布密集情形)下的检测率,并且保持一个较低的虚警率。
为了进一步验证IB-CFAR将强度域和空间域信息进行融合之后所起到的作用,本文在图13的基础上,绘制出了原强度域图像和融合域图像在相同坐标点下的对比图,如图14所示。由于非均匀量化增强了目标与杂波背景的相似度信息,使得目标中靠近中心的像素点与目标中四周的点相似性很高,且它本身的像素值也较大,因此根据式(7),中心像素点计算出来的值会很大;而目标中靠近边缘的像素点虽然与周围像素点的相似度较低,但是由于它本身的强度值较大,根据式(7)转为融合域后的值也会较大;而对于非均匀的杂波背景来说,由于本身计算出来的相似度值较低,再加上强度值也没有像目标像素点一样高,根据式(7)转化后相较于强度域来说,融合值并没有增长多少,只从40变为了47。而目标像素点的值从188增长到了238。实验结果验证了2.2.2节所介绍的融合理论。

图13 复杂环境下的检测结果比较,其中包含密集分布的30个目标,并且图像中还存在重影和防波堤Fig.13 Comparison of detection results in complex environment,which contains 30 targets with dense distribution,and there are ghost and anti wave in the image

图14 原强度域图像和融合域图像在相同坐标点下的对比图Fig.14 Comparison of original intensity domain image and fusion domain image at the same coordinate point
此外,由于将强度域和空间域信息融合起来进行目标检测,IB-CFAR可以更加精细化地突出高分辨率SAR图像中舰船目标的结构信息,并且最大限度地去除非均匀异质点的干扰,在提升检测率的同时保持一个较低的虚警率,如图15和图16的(a)和(i)所示。
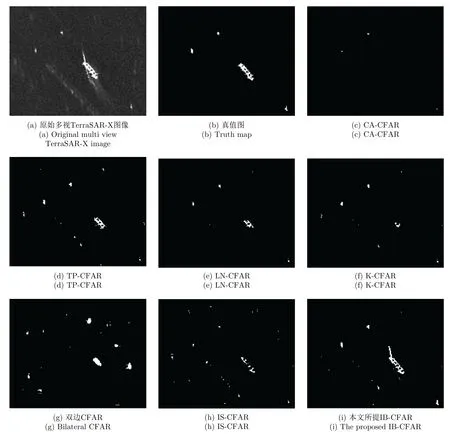
图15 检测结果对比Fig.15 Comparison of detection results

图16 复杂环境下的检测结果比较Fig.16 Comparison of detection results in complex environment
3.3 实验结果的定量分析
为了定量分析每种算法的检测性能,本文引入了几个衡量检测性能的指标:检测率Dr,误报率FAR,品质因子Fom和精度指标Precision。每个检测指标的定义为
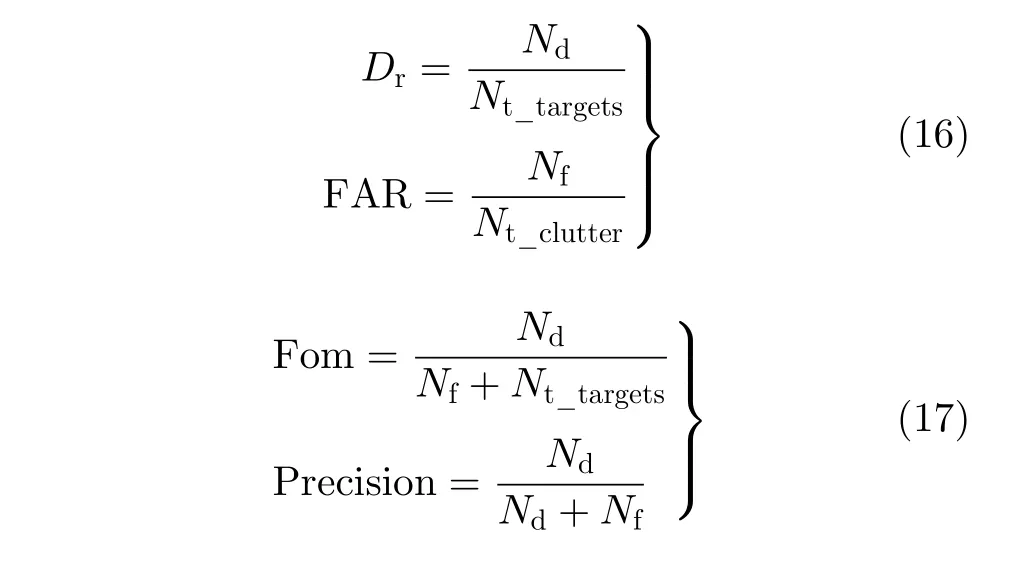
其中,Nd,Nt_targets,Nf和Nt_clutter分别代表实际检测到的目标像素的数量,船舶目标像素的总数,被错误检测目标像素的总数以及实际船舶目标外的海杂波像素的总数。
表2显示了各类CFAR检测器所得到的相应指标的结果。可以看到,所提出的IB-CFAR的Dr,Fom和Precision等都获得了最大值,并且FAR的值也相对较小。

表2 各CFAR检测器的性能分析Tab.2 Performance analysis of CFAR detectors
为了使上述比较更加令人信服,本文使用了多幅复杂环境下SAR图像(其中包括高分3号、TerraSAR-X等不同类型的SAR图像)来绘制各类CFAR检测器的ROC (Receiver Operating Characteristic)曲线,如图17所示。可以看到,所提出的IB-CFAR和IS-CFAR的检测精度均优于传统的CFAR检测器和双边CFAR检测器。这是因为这两种算法同时融合了强度信息、相似度信息和距离向信息来进行检测,能够比传统CFAR更加精细化地检测目标;而双边CFAR由于将强度与空间信息分开处理,在复杂环境下遇到低对比度目标时,会发生大量漏检。此外,IB-CFAR使用自适应截断深度可以有效地去除复杂环境下的高强度异质点,同时可以极大地保留真实的海杂波样本,因此它可以进一步提升在非均匀海况下的检测率。

图17 各类CFAR检测器的ROC曲线Fig.17 ROC curves of various CFAR detectors
4 总结
本文提出了一种复杂环境下改进的SAR图像双边CFAR舰船检测算法。针对双边CFAR检测算法在遇到弱目标时发生漏检的问题,本文设计一种非均匀量化方法以提升弱目标内部像素点间的相似度信息,从而提升舰船检测率;其次,针对双边CFAR在遇到连续的高强度异质点时,所得到的联合图像与实际图像的海况分布相差较远的问题,本文设计一种自适应强度、空间信息融合模型,将空间相似度、距离向和强度等信息进行融合,在不改变实际海况基本分布的基础上,最大限度地提升目标与周围杂波之间的对比度信息,在进一步提升检测率的同时,对舰船的结构信息进行精细化描述。最后,针对上述所提到的各类CFAR检测器无法有效去除背景窗口中高强度异质点的问题,本文在OR-CFAR的基础上,设计出一种基于自适应截断深度的杂波截断方法,在有效去除背景窗口中高强度质点的同时,最大限度地保留真实海杂波样本,以进行精确的参数估计和统计建模。实验结果表明,IB-CFAR在包含较多密集分布的弱目标环境下表现良好,能够很好地提升复杂环境下弱目标的检测率,但在弱目标个数较少且背景十分复杂的环境下,会出现少量虚警。IB-CFAR具有很好的鲁棒性,并且能够精细化地描绘出高分辨率SAR图像中舰船目标的结构信息,有着很好的应用价值。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
舰船电子工程(2022年1期)2022-02-12
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05
现代电子技术(2021年1期)2021-01-17
舰船电子对抗(2020年5期)2020-11-26
现代电子技术(2018年18期)2018-09-12
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
试题与研究·高考理综物理(2016年3期)2017-03-28
试题与研究·高考理综物理(2016年3期)2017-03-28