高压电力巡检双轮加紧机构研究设计
2021-09-01 10:25:15杨东泽邵江明李德玖贾萱温裕鸿徐静
科学与生活 2021年9期
杨东泽 邵江明 李德玖 贾萱 温裕鸿 徐静
摘要:巡检装置在山区线路巡检过程中,爬坡性能是很重要的一项指标,提高爬坡能力主要通过以下两种手段,一是增加行走轮与线路间的摩擦系数,二是增加行走轮与线路的正压力。本项目中主要通过增加双轮间的夹紧力提高正压力,通过夹紧电机带动滚珠丝杠结构使双轮夹紧,提高正压力,增强巡检机构的爬坡能力。
1.爬坡性能分析
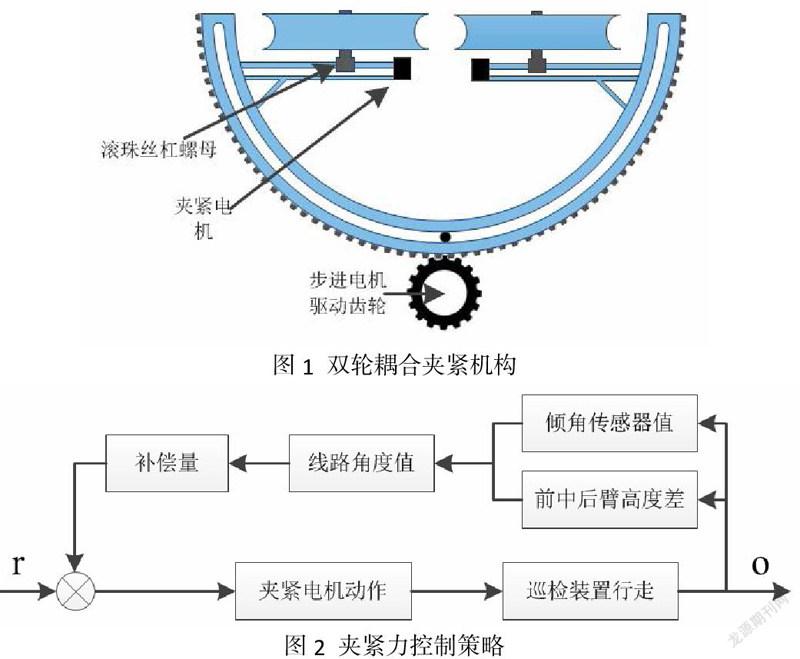
巡检装置在山区线路巡检过程中,爬坡性能是很重要的一项指标,提高爬坡能力主要通过以下两种手段,一是增加行走轮与线路间的摩擦系数,二是增加行走轮与线路的正压力。本项目中主要通过增加双轮间的夹紧力提高正压力,双轮耦合夹紧机构如图1所示,通过夹紧电机带动滚珠丝杠结构使双轮夹紧,提高正压力,增强巡检机构的爬坡能力。控制策略如图2所示。
夹紧力控制策略如图所示,通过倾角传感器和前后手臂的高度差值,检测巡检装置倾斜角度,进而以补偿量的形式,控制加紧电机动作,提升夹紧力,提升爬坡能力。
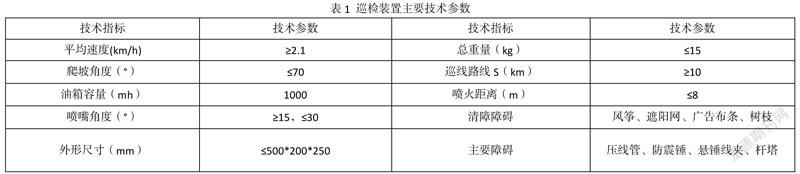
巡检装置要能够在输电线路上的行走和跨障,适应作业环境与各种复杂气候环境,并且完成巡检任务,机械本体结构是整个系统的基础性和关键性研究。巡检装置的机械本体结构应满足如下技术指标。
小结:本项目中主要通过增加双轮间的夹紧力提高正压力,通过夹紧电机带动滚珠丝杠结构使双轮夹紧,提高正压力,增强巡检机构的爬坡能力。
参考文献
[1] 付双飞. 超高压输电线路巡检机器人越障控制的研究[J]. 机器人, 2005, 27(4):341-345.
[2] 唐栎. 超高压输电线路巡检机器人控制系统的研究与设计[J]. 中国科学院沈阳自动化研究所, 2004.
[3] 任志斌. 高压输电线巡检机器人控制系统的研究与实现[D]. 上海大学.
[4] 赵东雷. 输电线路巡检机器人越障行走装置设计与研究[D]. 华北电力大学, 2019.
[5] 姜文濤. 高压输电铁塔攀爬机器人爬行越障装置研究[D]. 华北电力大学, 2019.
[6] 熊捷, 刘国平, 高超,等. 一种架空高压输电线路巡检机器人回收装置:, CN107017578B[P]. 2019.
[7] 田乐. 基于地面操控的高压输电线路巡线装置研究[D]. 兰州理工大学.
[8] 吴功平, 郑拓, 肖华,等. 高压输电线路自主巡线机器人及其应用[C]// 全国输变电设备状态检修技术交流研讨会. 2009.
[9] 冯凝, 王骞, 臧春艳,等. 高压套管油流外溢的化学检测方法研究[J]. 输配电工程与技术, 2018, 007(001):P.21-27.
经费支持:衢州学院2020年国家级大学生创新创业训练计划项目(202011488028)
衢州学院 电气与信息工程学院 浙江衢州 324000
猜你喜欢
当代陕西(2021年13期)2021-08-06 09:24:32
当代工人(2020年1期)2020-05-11 11:47:32
制造技术与机床(2019年11期)2019-12-04 05:50:26
国际木业(2016年10期)2016-12-21 03:12:38
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
机械制造与自动化(2014年1期)2014-03-01 04:21:45
机械与电子(2014年3期)2014-02-28 02:07:57