
基于MOEA/D 算法的起重船压载水调配优化
2021-08-31 00:46周佳宋磊
中国舰船研究 2021年4期
周佳,宋磊
山东交通学院 船舶与港口工程学院,山东 威海 264209
0 引 言
起重船在作业过程中需通过调配压载水来保持安全的浮态和稳性。通过人工计算制定压载水调配方案的方法存在计算过程复杂、计算耗时长、出错率高等缺点,且大多数情况下并不能合理有效地利用压载舱来实现高效的调载作业过程。因此,研究起重船压载水调配优化方法,以提高压载水的调配效率并降低能耗具有重要意义。
Bara 等[1]基于图论提出了船舶吊装货物时压载系统稳性最优控制策略,但该方法的计算复杂度较高,求解速度慢。刘晓宇[2]和刘志杰等[3]基于力矩平衡原理,建立了起重船压载水调配优化模型,并采用经典优化理论进行了求解,获得的调配方案能够降低调配量,但增加了参与调载的舱室数量。柳春清等[4]结合实际操作经验编制了半潜式海洋起重平台压载调配过程模拟系统,但该系统是通过对手工调载计算结果的比较来实现方案优化的,且优化结果易受人为因素的影响。姜健宇等[5-6]、鞠成嵩[7]和于德义[8]采用动态规划方法,分别对不同压载系统的起重船压载水调配进行了优化,但该方法的计算效率会随着压载水调配阶段的细分而降低。潘伟等[9]根据力矩平衡原理提出了一种全回转起重船压载水调拨模型,允许起重船产生规范允许范围内的横倾角和纵倾角,但未对所应用的Lingo 软件求解算法进行讨论。魏伊[10]将改进的NSGA-II 算法应用到了深水铺管起重船的自动调载系统中,结果表明,该方法可明显减少调载水量,但由于对非支配排序等级进行了二次排序,使得计算耗时增加,且随着压载水舱数量 的增加,解集质量变差。秦军超[11]在“蓝鲸”号起重船的调载仿真中提出了多目标略减粒子群 算法,通过略减粒子群优化(particle swarm optimization,PSO)算法中的速度项,提高了求解的收敛性和进化效率,但优化结果并不理想。截至目前,在起重船压载水调配的优化问题方面,前人已应用多种方法,但普遍存在优化求解速度慢、结果易陷入局部最优的问题。Zhang 等[12]提出的基于分解技术的多目标进化算法(MOEA/D)是将进化算法与数学规划方法有机结合,通过子问题之间的协同优化,可在提高解集质量的同时提高计算效率,且该算法已被成功应用于船型设计等多类优化问题。
因此,本文拟基于MOEA/D 算法对起重船压载水调配方案进行优化。首先,在前人研究的基础上建立起重船压载水调配优化的数学模型。为了解决以往算法在优化求解时因决策变量维数过高而导致的优化速度慢和结果差的问题,提出一种调载舱室的自适应选择方法,以减少参与调载的压载水舱数量。其次,针对单目标优化结果不稳定、容易陷入局部最优的问题,将压载水调配优化问题转化为多目标优化问题来处理,并采用MOEA/D 算法进行求解,然后再对Pareto 解集进行评价优选以得到起重船压载水调配优化方案,从而提高全局优化能力和求解稳定性。最后,通过对某起重船吊机回转过程压载水调配的实例计算,并与传统遗传算法(genetic algorithm,GA)进行对比,验证MOEA/D 算法在起重船压载水调配优化问题中的可行性和有效性。
1 起重船压载水调配优化数学模型
1.1 决策变量
起重船压载水的调配需要根据工况条件确定各压载水舱的压载水量,故设决策变量为
式中:v为一个n维向量;vn为压载水舱n在调配后的压载水量(n为压载水舱个数),m3;V为决策空间,由于调配后的压载水量不能超过压载水舱的舱容,故有
式中:vj为 压载水舱j在调配后的压载水量;uj为压载水舱j的舱容,m3。
1.2 目标函数
从降低能耗的角度考虑,通常将压载水总调配量最小作为优化目标,目标函数为:
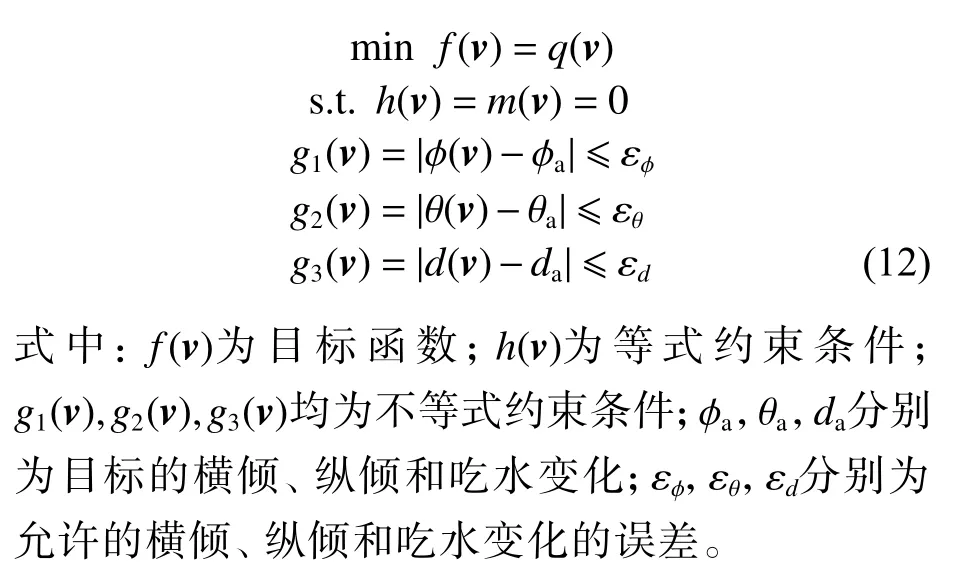
1.3 约束条件
一般地,起重船对压载水进行调配应考虑起重船稳性、浮态和总纵强度等几个方面的约束。
1.3.1 稳 性
压载水调配后的起重船需满足稳性的要求。根据起重船的初稳性和稳性高公式,有

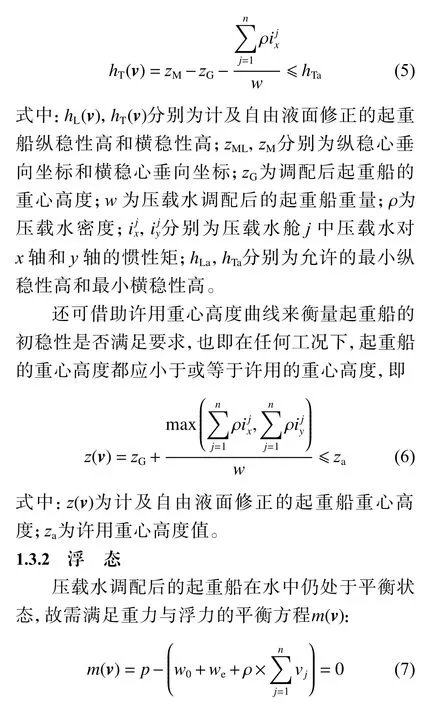
式中:p为浮力;w0为空船重量(不包括各舱的压载水);we为外载荷(如起重货物等)。
起重船在压载水调配后的任意漂浮状态下的浮态可以用吃水、纵倾角和横倾角来描述,且均可表示为决策向量v的函数。若已知起重船静水力表和舱容表等起重船资料,便可先计算压载水调配后的起重船重量重心,再通过查表插值得到相应的起重船平均吃水和浮心位置,继而计算出起重船的浮态。

对于调配前后的吃水变化和调配后的纵、横倾值,有时要求为定值,有时满足一定的范围即可,故约束条件式(8)~式(10)可能为等式约束条件,也可能为不等式约束条件。
1.3.3 总纵强度
起重船结构的总纵强度会受到压载水调配的影响。起重船的总纵弯矩计算遵循如下步骤:1) 计算载荷质量对中力矩;2) 计算空船对中力矩;3) 计算浮力对中力矩;4) 计算静水弯矩;5) 估算总纵弯矩[13]。
1.4 优化数学模型的构造
对多数情况而言,压载水的调配通常不会引起起重船稳性不足或起重船总纵强度的超限,故一般仅对调载后的起重船进行稳性校核和总纵强度校核,而不会将约束条件式(6) 和式(11) 引入优化求解过程中。因此,在此种情形下,本文将起重船压载水调配优化问题构造为式(12)所示的含有浮态约束条件的单目标优化数学模型。但是,如果压载水调配容易引起船舶的稳性或强度问题,则约束条件式(6)或式(11)也应引入到优化模型中。
2 基于MOEA/D 的起重船压载水调配优化算法
起重船压载水舱的数量 一般都比较多,大型起重船的压载水舱数量更是多达50 个。因此,在对上述优化模型进行求解时,决策变量v的维数很多,解空间很庞大。若直接应用进化算法予以求解,不但求解速度慢,而且很难得到令人满意的解。舱室数量越多,求解速度越慢,最优解的质量也就越差。在实际情况中,往往通过调节少数的舱室就能达到所要求的浮态,并非需要所有的压载水舱都参与调节。因此,本文将通过对压载水调配过程的分析,讨论如何根据起重船的浮态自适应选择较为有效的压载水舱参与调节,以降低决策变量v的维数,加快求解速度;然后,通过将含约束的单目标优化问题转化为无约束的多目标优化问题,基于分解的思想,应用MOEA/D优化算法进行求解,提高解的质量。
2.1 调载舱室的自适应选择
人工计算压载水调配时,一般是依据经验选择部分舱室参与调载,然后经过反复试算,得到目标浮态下的压载水调配方案。本文通过对起重船的压载水调配过程进行分析,在借鉴孙承猛[14]提出的配对法和端部优先法的基础上,编制了压载水舱的自适应选择程序。
调载前,首先将起重船压载水舱按其坐标范围划分为纵向舱室列和横向舱室列,并对这些舱室列分别编号。然后,根据起重船的浮态情况选择舱室列参与调载。调载过程是先调节船舶的纵倾,再调节吃水,最后调节横倾。在程序中,对起重船浮态的以下几种情况进行判断,并选择相应的有效舱室参与压载水调配。
1) 纵倾不满足目标纵倾值,吃水不满足目标吃水:
(1) 若艏倾且吃水小于目标吃水,则选择靠近船艉部的舱室列参与压载;
(2) 若艉倾且吃水小于目标吃水,则选择靠近船艏部的舱室列参与压载;
(3) 若艏倾且吃水大于目标吃水,则选择靠近船艏部的舱室列参与卸载;
(4) 若艉倾且吃水大于目标吃水,则选择靠近船艉部的舱室列参与卸载。
2) 纵倾不满足目标纵倾值,吃水满足目标吃水,则选择艏部舱室列和艉部舱室列参与调载,在起重船压载舱之间进行压载水的调配。
3) 纵倾满足目标纵倾值,吃水不满足目标吃水,则选择靠近船舯的舱室列参与调载。若吃水小于目标吃水,则压载;若吃水大于目标吃水,则卸载。
4) 纵倾满足目标纵倾值,吃水满足目标吃水,则判断横倾是否满足。若横倾不满足目标横倾,则选择靠近船舯的舱室列进行横倾调节,直至起重船的浮态满足目标浮态要求。
上述情况一般是先选择一列或两列舱室参与调载。若所选择舱室列的调载能力不足(例如满舱后无法继续压载,空舱后无法继续卸载),则程序可根据起重船所处浮态,自动增加选择靠近船艉部或艏部的舱室列参与调载,直至有足够多的舱室参与调载而使起重船达到目标浮态。通过这种舱室的自适应选择方法,能够根据起重船的不同浮态选择最有效的少数几个舱室参与调载,从而减少参与调载的舱室数量,这可降低下一步优化求解时的决策变量维数,加快求解速度。
2.2 基于MOEA/D 算法的优化求解
2.2.1 多目标优化模型
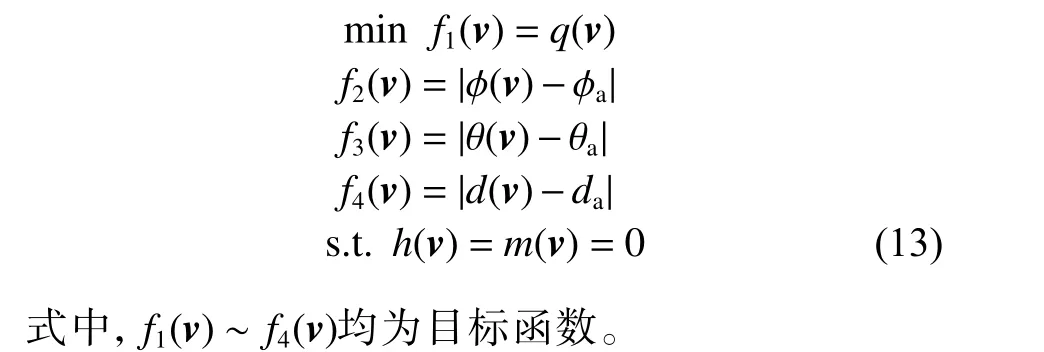
在运用进化算法求解单目标约束优化问题时,种群的适应值计算是关键,关系到算法能否快速有效地收敛至最优值。对于起重船压载水调配优化问题,则是将吃水和纵、横倾等约束条件通过惩罚函数法进行处理,构造适应度评价函数。然而,此算法所得解的质量严重依赖于惩罚因子的选取。若惩罚因子选择的过小,算法可能收敛不到可行解,得不到令人满意的调载方案;若惩罚因子选择的过大,搜索空间变小,使调配结果只能在目标浮态附近的小范围内搜寻。而对于起重船调载后的浮态,通常是要求满足在一定范围内即可,并不严格要求等于目标浮态。故可考虑将调载后的起重船浮态也作为优化目标,即在寻求压载水总调配量最小的同时,使起重船的吃水尽量接近目标吃水,纵、横倾尽量接近目标值。因此,前述的起重船压载水调配单目标优化问题就可以转化为多目标优化问题进行处理,即
2.2.2 MOEA/D 算法
在求解多目标优化问题的算法中,主要有基于支配关系的进化算法和基于分解思想的进化算法2种。其中,基于支配关系的进化算法(如NSGA-Ⅱ)的计算复杂度较高,与之相比,基于分解思想的MOEA/D 算法的计算复杂度则较低,且计算效率较高。这是因为MOEA/D 算法的执行首先需要得到一组均匀分布的权重向量来指导选择操作,其通过聚合函数方法来将多目标优化问题分解为一系列的单目标子问题,利用相邻子问题相似解间的信息来对各子问题进行协同进化[15]。正是由于分解操作的存在,该方法在保持解的分布性方面有着很大的优势,而通过分析相邻问题的信息来进行优化,则能避免陷入局部最优。
均匀分布的权重向量一般是采用Das 等[16]提出的systematic approach 方法生成。权重向量生成后,算法主要依靠聚合函数来比较所进化解的优劣来促进种群的进化。常用的聚合函数主要包括加权和(weighted sum)法、边界交集(PBI)法和切比雪夫(TCH)法。其中,加权和法可以较好地解决Pareto 前沿为凸的情况,但是不能处理非凸问题;PBI 法中引入了一个惩罚参数,该参数设置的好坏对优化结果的影响很大;TCH 法对Pareto 前沿面形状不敏感,但得到的解是不均匀的。本文采用TCH 法,其表达式为

2.2.3 目标归一化
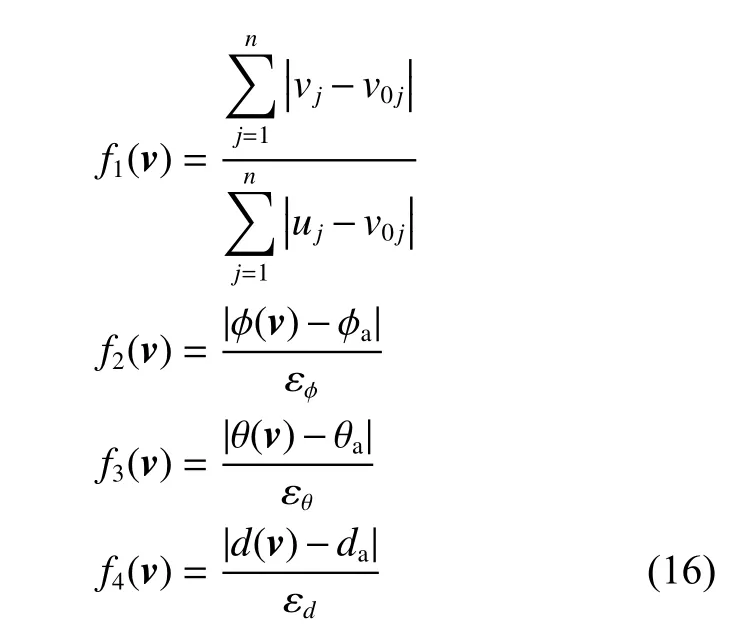
由于起重船压载水调配优化问题的各目标函数量纲不一,当采用MOEA/D 算法时,求解总是在压载总水量最小的目标方向上进化,而有关浮态的各目标则往往得不到满足,导致获得的结果并不是实际意义上的可行解。为了解决因目标函数量纲不同而导致的优化结果变差的问题,本文对各目标函数进行了归一化,处理后的各目标函数如式(16)所示。
2.2.4 解的评价优选
不同于单目标优化问题只能得到一个解,利用MOEA/D 多目标优化算法求解得到的是一个Pareto 解集。对于起重船压载水调配问题,其最终的方案就是从这个解集中选取。由于在将单目标优化模型向多目标优化模型转化的过程中,将约束条件变为了优化目标,因此结果中可能存在着并不满足原约束条件的解,需要加以验证,从而评价筛选出实际的可行解。在满足目标浮态的情况下,比较解集中各可行解的压载水总调配量,选取总调配量最小的解作为最终的压载水调配方案。
综上,本文基于MOEA/D 算法的起重船压载水调配优化方法如图1 所示。

图1 起重船压载水调配优化流程Fig. 1 Flow chart of optimization of crane vessels ballast water allocation
3 起重船压载水调配优化实例
以某起重船为例,对其在800 t 吊重下,自船艉0°位置开始起吊,回转至左舷90°位置的过程进行压载水调配计算,船的主要参数如表1 所示。
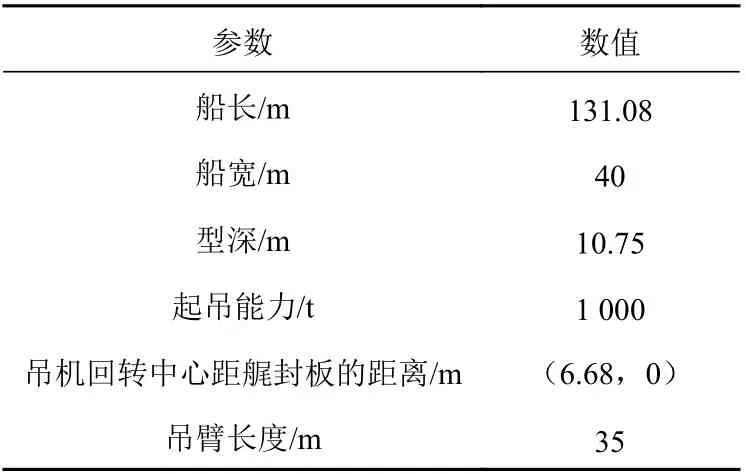
表1 起重船主要参数Table 1 Main parameters of crane vessel
该船共有25 个压载水舱(TK),根据前文所述处理方法,对各压载水舱从船艏至船艉划分为9 列,如图2 所示。沿船的横向,将后缀为P 的左舷舱室编号为1,后缀为C 的中部舱室编号为2,后缀为S 的右舷舱室编号为3。
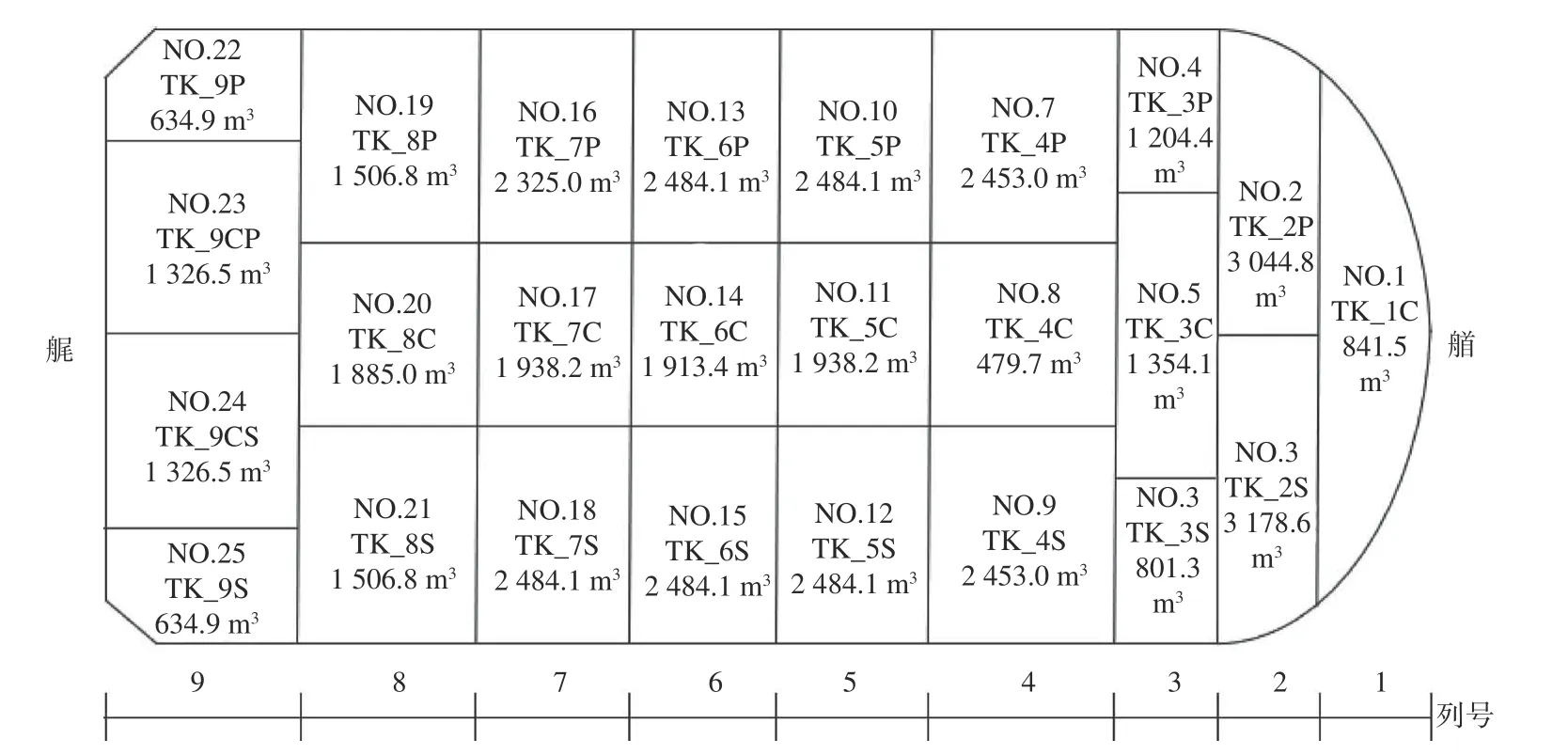
图2 压载水舱布置及舱容Fig. 2 Arrangemnet and capacity of ballast water tank
3.1 压载水调配计算
基于上文式(13)多目标优化模型,对该船的压载水调配问题进行实例化建模。首先,在起吊重物回转至各角度时,尽量使船正浮于吃水5~6 m位置,即目标浮态为 φa=0, θa=0,da=5.5, 并设 εφ=0.5,εθ=0.5, εd=0.5,艏倾为正,左倾为正。然后,按照图1 所示算法流程进行求解,MOEA/D 算法的聚合函数使用TCH 法,种群大小为78,邻域大小为20,迭代次数为100。为简化计算,仅以吊机每回转10°为间隔进行压载水调配的计算。
为便于对比,本文还针对上述浮态条件下的船舶压载水调配问题,应用NSGA-II 算法进行了优化,计算种群大小为50,迭代次数为100。此外,经典的GA 算法用于对式(12)单目标优化模型进行求解,对约束的处理则采用惩罚函数法。由于使用GA 算法运行一次只能得到一个最优解,且结果不够稳定,故本文采取了重复运算求解5 次并进行择优选择的方法,这在一定程度上减轻了GA 算法不稳定对求解质量的影响。采用MOEA/D 算法、NSGA-II 算法和GA 算法所得的起重船回转吊运过程中压载水调配方案的计算结果分别如表2、表3 和表4(表中未列出的舱室均为空舱)所示,而各阶段的调载量与起重船浮态的对比则如图3 所示。
3.2 优化结果分析
结合表2~表4 及图3,对由3 种算法所得到的优化结果分析如下:

图3 3 种算法下调载量和起重船浮态对比Fig. 3 Comparison of ballast adjustment and crane vessel floating state on three algorithms
1) 调载舱室数量。由于在优化求解之前加入了舱室自适应选择程序,故在3 种算法所得到的结果中,参与调载的舱室数量均较少。进一步对比表2、表3 和表4,发现MOEA/D算法仅在0°时使用了5 个舱室参与调载,在70°和90°时无需调载,其它阶段的调载舱室数量均为2 个,整个调载过程中共使用了19 个舱室;而其它2 种算法的调载舱室数量均为26,相比之下,MOEA/D 算法的减少了27%。

表2 MOEA/D 算法结果Table 2 Results of MOEA/D algorithm
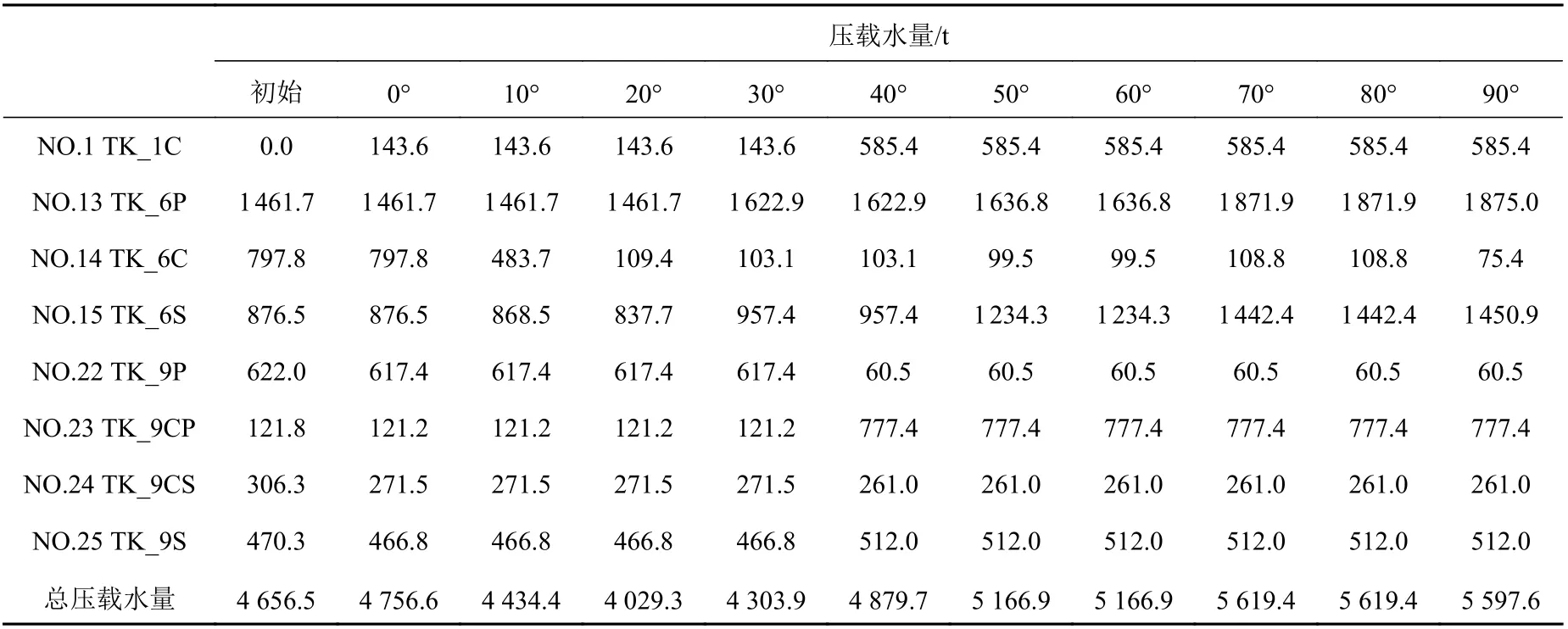
表3 NSGA-II 算法结果Table 3 Results of NSGA-II algorithm

表4 GA 算法结果Table 4 Results of GA algorithm
2) 调载水量。由图3(a)可知,由MOEA/D 算法得到的各阶段调载量除80°的以外均小于GA算法,而在80°时调载量大也是因为在70°时未调载所导致。NSGA-II 算法在40°之前总调载量最小,但为了满足在吊机旋转40°时的船舶浮态,调载水量突然增大。综合整个过程中的调载量发现,MOEA/D 算法相较于GA 算法减少了38%,相较于NSGA-II 算法减少了24%。
3) 浮态目标。由图3(b)~图3(d)可知,在整个调载过程中,GA 算法的结果都能保持较好的浮态,这是因为GA 算法使用了较大的惩罚因子来对起重船浮态的约束条件进行限制,但这也增大了对压载水调配量的需求。通过设置合理的浮态容差,采用MOEA/D 算法和NSGA-II 算法均能得到满足目标浮态范围的结果。但NSGA-II 算法在浮态目标3 个方向上的分布性并不均匀,从图中可以看出,当吃水和横倾目标得到较好的满足时,纵倾目标却较差。因此从优化结果的分布性角度看,MOEA/D 算法要优于NSGA-II 算法。
4 结 论
为减少起重船在压载水调配过程中参与调载的舱室数量和调载水量,建立了起重船压载水调配优化模型,提出了参与调载舱室的自适应选择方法,并应用MOEA/D 算法对起重船压载水调配方案进行了优化。经过实例计算分析,得到以下主要结论:
1) 通过所提的舱室自适应选择方法,可有效减少参与调载的舱室数量,从而提高优化算法的求解效率和求解结果的质量。
2) 将起重船压载水调配优化问题转化为多目标优化问题处理时,应用MOEA/D 算法具有良好的适用性,与NSGA-II 算法和GA 算法相比,应用MOEA/D 算法在计算中所选参与调载的舱室数量更少,计算结果在调载量目标上表现更优。但是,其在浮态目标上的表现不如GA 算法,而在各目标方向的分布性上优于NSGA-II 算法。
本文所提的基于MOEA/D 的方法为研究起重船压载水调配优化问题提供了一种新的解决思路。经综合考虑实际工程的需要,使用本文的MOEA/D 算法将能得到较优的起重船压载水调配方案。然而,本文未讨论各算法优化结果在船舶稳性和强度方面的差异,相关内容仍有待进一步的研究。
参考文献:BARA C, CORNOIU M, POPESCU D. An optimal
[1]control strategy of ballast systems used in ship stabilization[C]//Proceedings of 2012 20th Mediterranean Conference on Control & Automation (MED). Barcelona:IEEE, 2012: 878-883.
[2]刘晓宇. 全回转起重船压载水调拨方案优化研究[D].大连: 大连海事大学, 2016.LIU X Y. Research on ballast water allocation scheme optimization of full-revolving floating crane[D]. Dalian:Dalian Maritime University, 2016 (in Chinese).
[3]刘志杰, 刘晓宇, 熊伟, 等. 起重船舶压载水调配优化模型[J]. 交通运输工程学报, 2017, 17(2): 83-89.LIU Z J, LIU X Y, XIONG W, et al. Optimization model of ballast water allocation for crane ship[J].Journal of Traffic and Transportation Engineering, 2017,17(2): 83-89 (in Chinese).
[4]柳春清, 张克正, 张志敏. 半潜式海洋起重平台压载调配优化[J]. 中国科技论文, 2018, 13(7): 809-812.LIU C Q, ZHANG K Z, ZHANG Z M. Optimization for ballast process of semi-submerged offshore crane platform[J]. China Science paper, 2018, 13(7): 809-812(in Chinese).
[5]姜健宇. 全回转起重船泵压载系统压载水动态调拨优化及试验研究[D]. 大连: 大连海事大学, 2019.JIANG J Y. Research on ballast water dynamic allocation optimization and experiment for pump-based ballast system of revolving floating cranes[D]. Dalian:Dalian Maritime University, 2019 (in Chinese).
[6]LIU Z J, JIANG J Y, LIN C X, et al. Ballast water high-efficiency allocation optimisation modelling with dynamic programming for revolving floating cranes[J].Ships and Offshore Structures, 2018, 13(7/8): 857-867.
[7]鞠成嵩. 起重船泵和重力自流复合压载系统压载水调拨优化研究[D]. 大连: 大连海事大学, 2018.JU C S. Research on ballast water allocation optimization for pump and gravity self-flow combined ballast system of floating cranes[D]. Dalian: Dalian Maritime University, 2018 (in Chinese).
[8]于德义. 起重船PGC 复合压载系统压载水调拨优化模型及应用研究[D]. 大连: 大连海事大学, 2019.YU D Y. Research on ballast water allocation optimization model and application for PGC-based complex ballast system for floating cranes[D]. Dalian: Dalian Maritime University, 2019 (in Chinese).
[9]潘伟, 谢新连, 包甜甜, 等. 全回转起重船作业压载水调节优化研究[J]. 哈尔滨工程大学学报, 2019, 40(1): 189-195.PAN W, XIE X L, BAO T T, et al. Ballast water allocation optimization of revolving crane vessels[J]. Journal of Harbin Engineering University, 2019, 40(1): 189-195(in Chinese).
[10]魏伊. 深水铺管起重船调载仿真技术研究[D]. 哈尔滨:哈尔滨工程大学, 2014.WEI Y. Research on ballast simulation technology applied to deepwater pipelay crane vessel[D]. Harbin: Harbin Engineering University, 2014 (in Chinese).
[11]秦军超. “蓝鲸”号起重船调载仿真技术研究[D]. 威海:山东交通学院, 2019.QIN J C. Research on load adjustment simulation technology of Blue Whale floating crane craft[D]. Weihai:Shandong Jiaotong University, 2019 (in Chinese).
[12]ZHANG Q F, LI H. MOEA/D: a multiobjective evolutionary algorithm based on decomposition[J]. IEEE Transactions on Evolutionary Computation, 2007, 11(6):712-731.
[13]方琼林, 邵哲平, 潘家财. 半载条件下矿砂船压载方案的设计[J]. 集美大学学报(自然科学版), 2017, 22(2):31-34.FANG Q L, SHAO Z P, PAN J C. Research on two ballasting schemes for ore carriers in half laden condition[J]. Journal of Jimei University (Natural Science),2017, 22(2): 31-34 (in Chinese).
[14]孙承猛. 下水驳船实时配载关键技术研究[D]. 大连: 大连理工大学, 2009.SUN C M. Research on the key technologies of launch barge's real-time stowage planning[D]. Dalian: Dalian University of Technology, 2009 (in Chinese).
[15]毕晓君, 王朝. 基于MOEA/D 的船舶水动力性能优化[J].哈尔滨工程大学学报, 2018, 39(10): 1681-1687, 1694.BI X J, WANG C. Ship hydrodynamic performance optimization based on MOEA/D[J]. Journal of Harbin Engineering University, 2018, 39(10): 1681-1687, 1694 (in Chinese).
[16]DAS I, DENNIS J E. Normal-boundary intersection: a new method for generating the Pareto surface in nonlinear multicriteria optimization problems[J]. SIAM Journal on Optimization, 1998, 8(3): 631-657.
[17]QI Y T, MA X L, LIU F, et al. MOEA/D with adaptive weight adjustment[J]. Evolutionary Computation,2014, 22(2): 231-264.
猜你喜欢
装备环境工程(2022年9期)2022-10-13
中国药学药品知识仓库(2022年7期)2022-05-10
小学生学习指导(低年级)(2021年12期)2021-12-31
今日农业(2021年2期)2021-11-27
兵器装备工程学报(2021年5期)2021-06-02
船舶标准化工程师(2020年1期)2020-06-12
阅读与作文(英语初中版)(2019年8期)2019-08-27
小学生学习指导(低年级)(2018年11期)2018-12-03
小学生学习指导(低年级)(2018年11期)2018-12-03
Coco薇(2015年7期)2015-08-13
