
基于无迹卡尔曼滤波的非线性解耦方法在火电机组中的应用研究
2021-08-28 02:22王永刚孙羽苗张楠楠孝锐敏张明鉴
电气技术 2021年8期
王永刚 孙羽苗 张楠楠 孝锐敏 张明鉴
基于无迹卡尔曼滤波的非线性解耦方法在火电机组中的应用研究
王永刚1孙羽苗1张楠楠1孝锐敏1张明鉴2
(1. 沈阳农业大学信息与电气工程学院,沈阳 110866; 2. 国网辽宁省电力有限公司检修分公司,沈阳 110003)
针对火电机组存在强耦合、强非线性和参数不确定性,难以采用常规控制方法对其进行有效控制的问题,本文首先分析系统的非线性强度及系统的模型参数不确定性对系统的影响,在深入了解系统动态特性的基础上,对系统参数采用无迹卡尔曼滤波(UKF)方法进行估计,采用全局线性化控制(GLC)策略对上述系统进行控制。仿真结果表明,采用UKF方法能够快速有效地估计模型的不确定参数,基于GLC的方法与反馈线性化控制方法相比,提高了系统的控制性能。该模型具有较强的鲁棒性,可为实际生产提供技术支持和理论指导。
火电机组;非线性解耦控制;全局线性化控制(GLC);参数估计;无迹卡尔曼滤波(UKF)
0 引言
随着我国电力行业的发展,新能源发电技术已经达到新的水平。但由于一些新能源发电如风力发电、水力发电等易受环境、时节等干扰,所以我国电力主要来源依旧是火力发电。随着大容量火电机组所占比例的增大,为保证电力系统的稳定安全运行,机组参与调峰调频成为必需[1-2]。随着电力工业的快速发展及经济体制改革的不断深入,如何降低机组煤耗、在保证锅炉安全、高效运行的基础上兼顾机组的经济性,成为很多学者和工程技术人员的重要研究方向之一,因此改善火电机组的控制性能对保证电力系统的安全运行具有极大意义[3]。

卡尔曼滤波是解决模型参数不确定问题的有效方法,其相关研究引起了国内外专家学者的极大关注。文献[8-9]设计了基于扩展卡尔曼滤波(extended Kalman filter, EKF)的自适应观测器,用于预估电池重要参数电荷状态变量。文献[10]基于三相永磁直线同步电机在同步旋转坐标系下的数学模型,通过两个低阶EKF算法串行执行,在当前周期的最优估计处完成泰勒近似,提高状态估计精度。文献[11]利用EKF方法准确地估计出自磨机的模型状态和参数。EKF在火电机组中也有少量应用。文献[12]提出采用基于卡尔曼滤波的汽包水位多传感器信息融合方法进行汽包水位测量。文献[13]提出了一种基于自适应EKF的汽包水位估计方法,把系统线性化过程中所省略的高阶项部分全部归并到状态噪声中,取得了一定的效果。
传统的控制方法虽然较好地解决了火电机组的强耦合性和强非线性问题,提高了鲁棒性,但并未考虑到火电机组参数不确定问题;并且当系统存在强非线性的时候,基于卡尔曼滤波的方法在参数估计精度上很难达到满意的效果。为了进一步提高系统的控制品质和模型参数估计精度,本文提出一种新的控制策略,即将无迹卡尔曼滤波(unscented Kalman filter, UKF)算法与全局线性化控制(global linearized control, GLC)算法相结合,实现对火电机组的有效控制。本文在深入分析火电机组模型动态特性的基础上,针对其存在的参数不确定性问题,采用基于无迹卡尔曼滤波的方法实时估计参数的变化;同时利用全局线性化反馈线性解耦控制方法来降低系统的强非线性对系统的影响,以得到更好的跟踪效果,并提高系统的控制性能。
1 火电机组模型
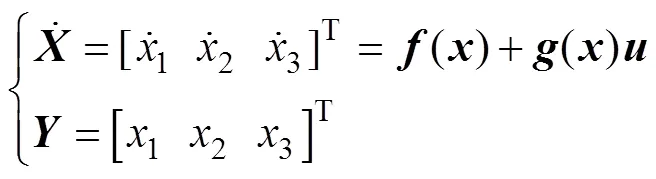
由文献[14-15]可知,AstrÖm K. J. 和Eklund K.在最初的火电机组模型中,给出的模型结构为


式中:为火电机组的汽包压力;1为燃料调节阀阀位;2为蒸汽出口调节阀阀位;3为给水调节阀阀位;(1,3)为输入功率;0为输出功率。在式 (1)中


由文献[1]可知,最终式(1)形式为

式中,、1、2、3、4、5均为常数,但是需要假设系统的热焓差和锅炉的效率是常数。模型中的参数可以通过系统的实际数据获得。后来,AstrÖm K. J. 对上述模型又进行了改进,最终在文献[16]中,给出160MW锅炉-汽机系统的三阶模型。该模型选取汽包压力、输出功率和汽包内水汽混合物密度为输出状态,有
其中
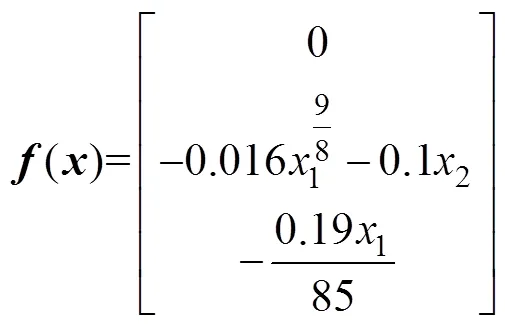
式中:1为汽包压力(kg/cm2);2为输出功率(MW);3为汽包内水汽混合密度(kg/cm3)。汽包水位偏 差为

其中

式中:e为蒸发占比(kg/s);cs为蒸汽品质。
2 火电机组模型的动态特性分析
2.1 系统模型参数不确定性分析


图1 模型参数不确定性对汽包压力的影响
由图1~图4可以看出,当模型参数1发生微小变化时系统的汽包压力、输出功率、水汽混合密度和汽包水位偏差等都发生了显著改变,尤其是汽包压力和水汽混合密度产生的波动较大。通过上述实验表明,当系统某些模型参数发生时变时,火电机组的动态特性发生了较大变化,有必要采取相应策略消除不确定参数对系统的影响。
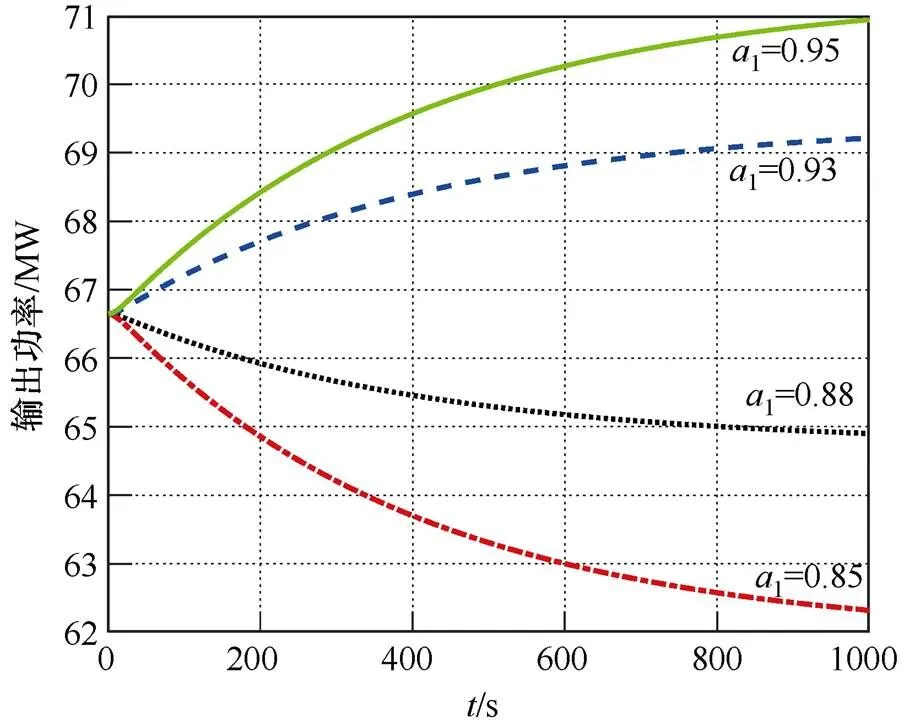
图2 模型参数不确定性对输出功率的影响
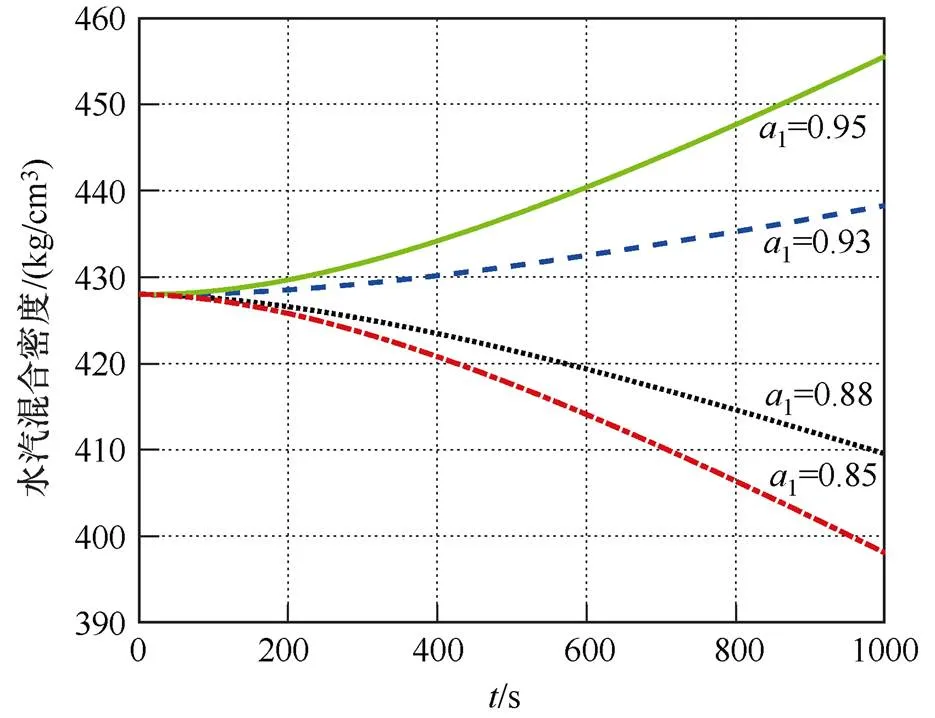
图3 模型参数不确定性对水汽混合密度的影响

图4 模型参数不确定性对汽包水位的影响
2.2 系统的非线性特性分析
非线性系统的非线性强弱可以用非线性度量判断。本文采用文献[17]的方法,即基于间隙度量(gap metric)的非线性度量方法实现对火电机组非线性强弱的度量。单输入单输出系统与多输入多输出系统都可以采用这种方法。
本文被测非线性系统的操作空间可依据g个操作点在与火电机组的某个工作点相近的运行区间进行网格划分。非线性度量可用式(8)表示。


图5 火电机组的非线性计量曲线
2.3 系统的强耦合性特性分析
3 基于UKF的火电机组非线性控制方法
3.1 控制策略

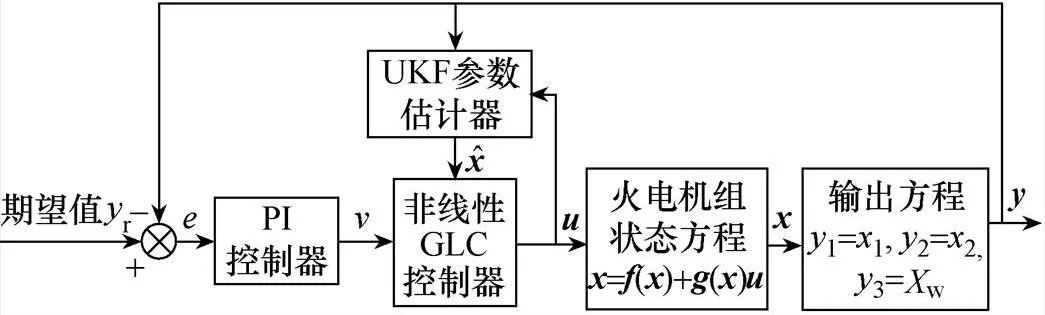
图6 基于UKF的火电机组非线性解耦控制策略
3.2 基于UKF的火电机组模型参数估计
1)基于不确定参数的火电机组估计方程
由2.1节分析可知,火电机组的模型参数中1发生变化时会对系统产生显著影响,本文以1参数为例构建系统的估计方程,即

对于火电机组系统来讲,其整个过程的动态特性是一个慢时变过程,这里可以假定在一个采样周期内,其模型参数的变化为零,即

联立式(9)和式(10)可以得到系统新的状态估计方程为
四季柚苗木种植前应做好:剪、修、浆等工作。剪,就是对四季柚苗木进行定干,以35-40 cm为宜;修,就是柚苗木根部进行整修,剔除挖伤、不合理布局、开裂的根系;浆,就是对根部进行稀泥浆根,可在泥浆中放入少量钙镁磷,泥浆不要太浓,以能粘住根部即可。

输入变量为

观测变量为

将上述方程离散化,并对输入输出方程加入噪声,则系统的状态估计方程为
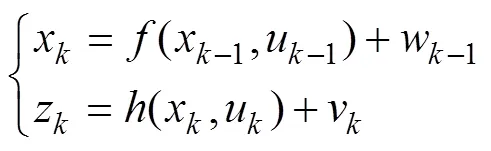
式中:w-1为系统噪声;v为测量噪声。
2)基于UKF的参数估计
当系统存在类似于火电机组的强非线性特性问题时,基于扩展EKF方法的参数估计并不准确。UKF方法无需对原系统进行线性化处理,相对于EKF方法,其优势在于降低了由于EKF线性化所带来的误差。为了有效提高模型参数的估计精度,本文将原始数据进行无损变换,得到近似系统的概率密度函数,以此获得状态估计的均值与方差。
(1)无损变换
在进行模型参数估计之前,要对原始数据进行无损变换。无损变换步骤如下:



(2)UKF算法
卡尔曼滤波与无损变换相结合就形成了无迹卡尔曼滤波。该方法分为以下4个阶段:



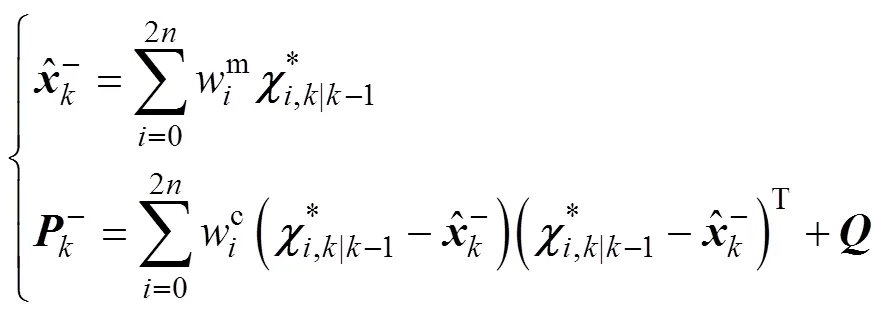
③时间更新。根据离散化系统状态方程实现 Sigma 点传递,并根据传递结果获得状态向量预测均值与协方差,即

式中,为输入矩阵。

④测量更新。由系统测量值获得状态向量预测平均值、卡尔曼增益量和协方差矩阵迭代,对状态向量和其协方差矩阵的进一步预测为





3.3 GLC控制器设计
由第2节火电机组的动态模型可知,该系统是一类仿射非线性系统,可以化成如下的模型结构,即

则称r为系统第个输出的相对阶。此时有

建立非线性化模型特征矩阵为

()又可以叫做解耦矩阵,需要满足如下条件:
(1)各个输出均含有相对阶r,同时r≠0。这能够确保系统是输出可控的。
(2)操作点0的周围的特征矩阵()是非奇异。
基于GLC的控制方法是将式(30)进行以下变 换,即

应用式(31)可得

()、()分别为


其中()与()之间的关系为

则存在如下的控制律,即

使其闭环响应为

由式(38)可知,使用GLC的方法后,火电机组的多个控制回路被完全解耦,转变成个单输入单输出(SISO)系统。这时能够按照SISO系统设计控制器,本文采用PI控制器。

4 仿真结果与分析
4.1 UKF模型参数估计仿真


图7 模型参数a1估计效果
由图7可以看出,当不确定参数1发生变化时,EKF算法虽然能够估计其变化,但UKF算法的估计效果优于EKF方法,具有更好的快速性和稳定性。由图8~图10可以看出,EKF与UKF的估计值都能跟踪火电机组的输出功率、汽包压力和水汽混合密度的实际变化,但UKF具有更好的估计精度。

图8 输出功率仿真结果1

图9 汽包压力仿真结果1
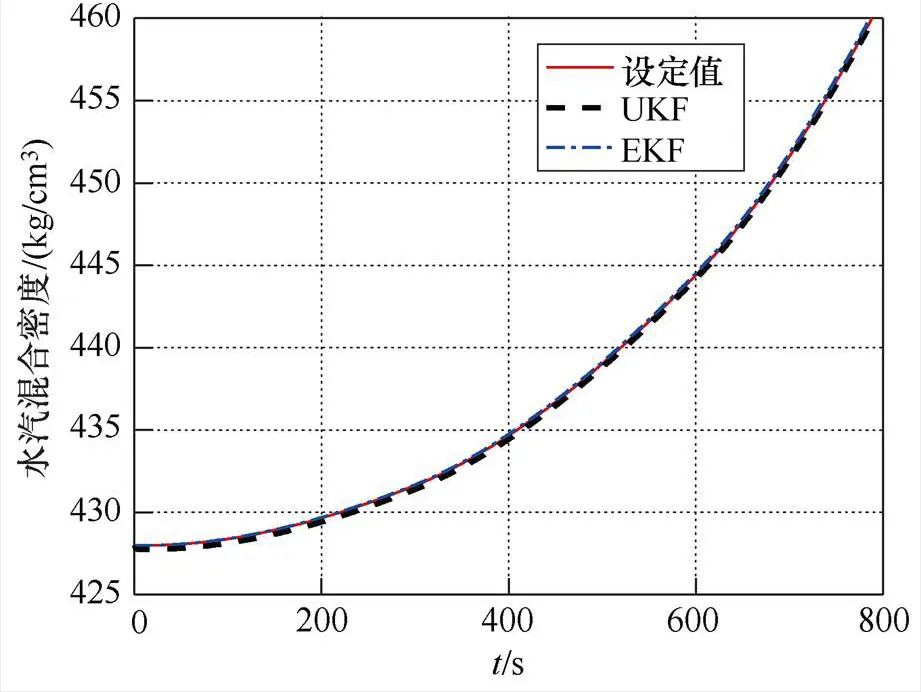
图10 水汽混合密度仿真结果1
为充分模拟火电机组1参数的时变特性,本文在=0时刻开始,将模型参数1设定为正弦曲线变化,幅值为[0.7 1.1],以进一步考察UKF算法的跟踪效果。为了更好地模拟火电机组的复杂特性,本文在仿真过程中加入测量噪声和观测白噪声,估计效果如图11~图14所示。从图11~图14中可以看出,当系统参数发生时变并加入白噪声后,系统的估计值还是能很好地跟踪系统参数变化,具有较好的估计效果。

图11 模型参数a1在随机干扰下的估计效果

图12 输出功率仿真结果2

图13 汽包压力仿真结果2

图14 水汽混合密度仿真结果2
4.2 基于UKF的GLC方法仿真


图15 汽包压力控制效果1
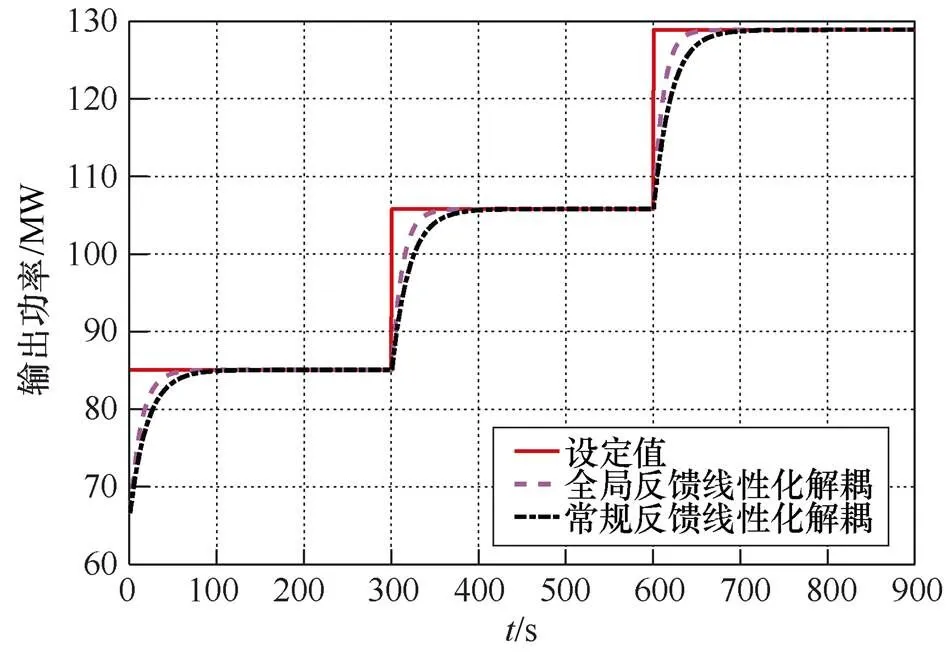
图16 输出功率控制效果1
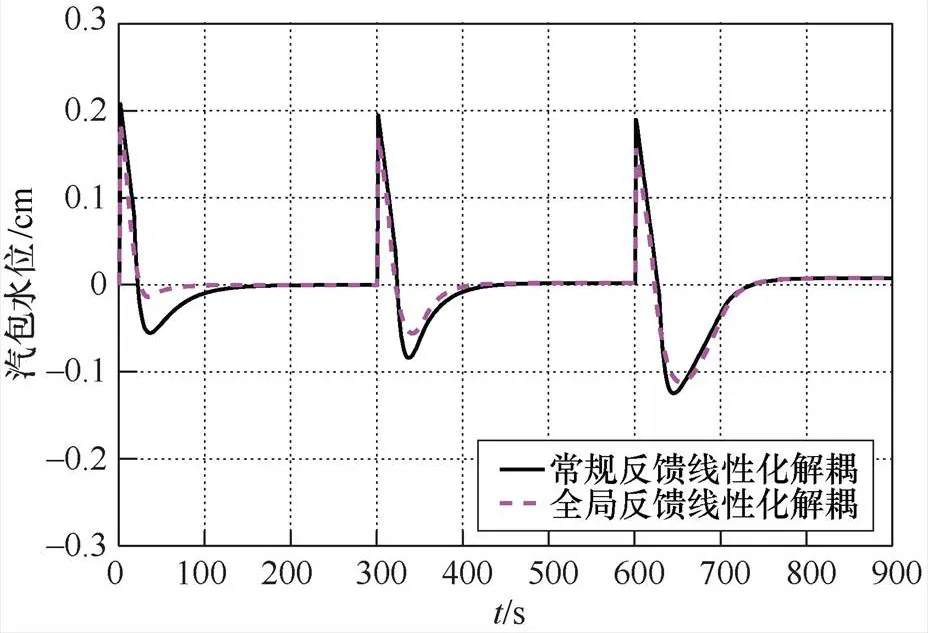
图17 汽包水位控制效果1

图18 基于GLC的控制器输入1

图19 基于常规反馈线性化解耦的输入
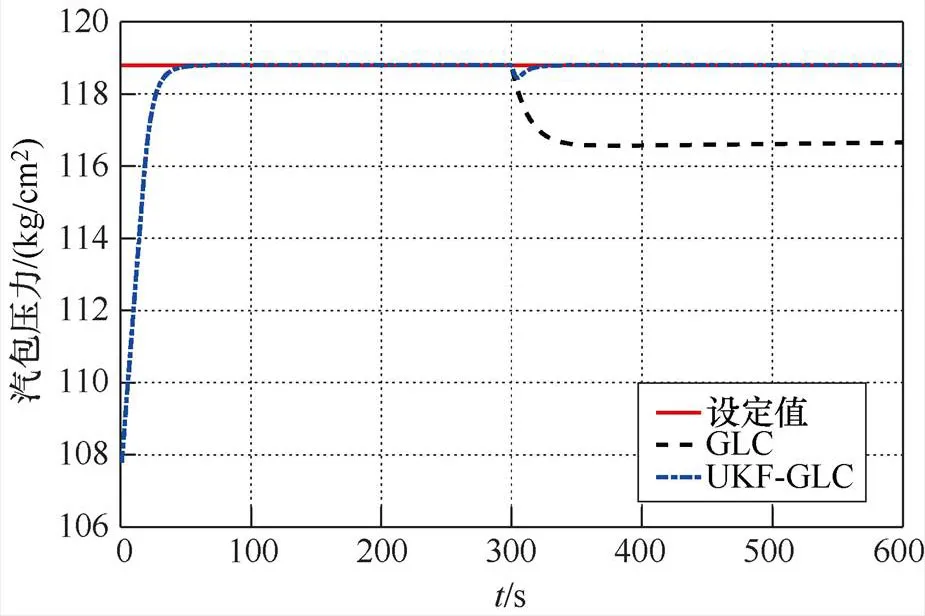
图20 汽包压力控制效果2
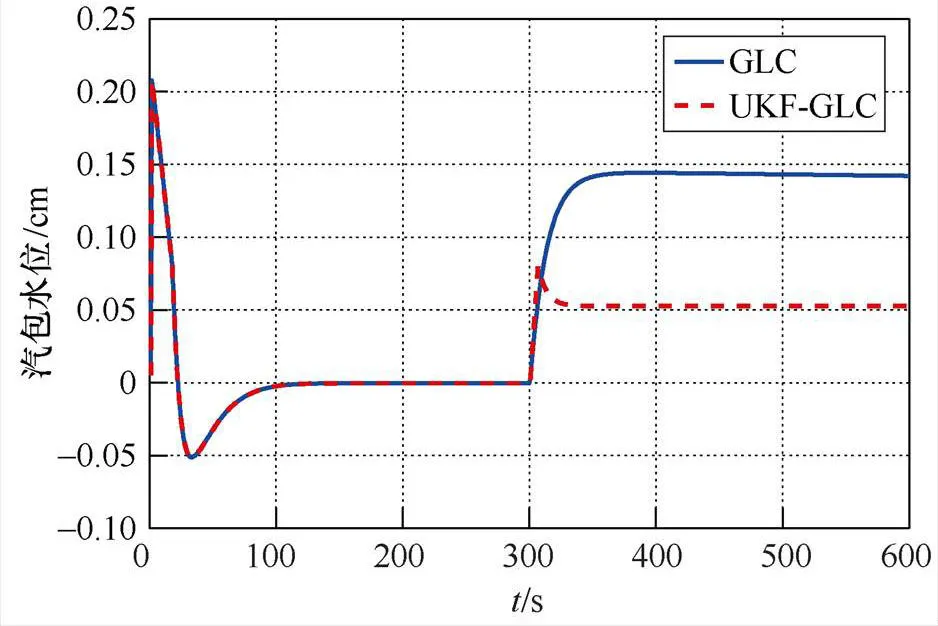
图21 汽包水位控制效果2

图22 输出功率控制效果2
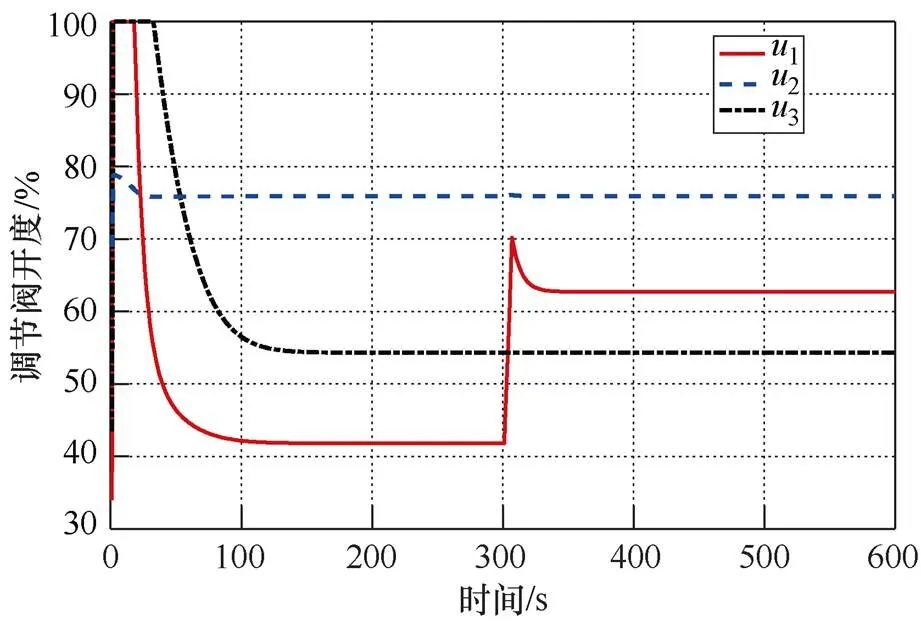
图23 基于GLC的控制器输入2

图24 基于GLC-UKF的控制器输入
5 结论
本文针对火电机组的动态特性,设计了一种基于UKF的火电机组非线性控制方法,克服了参数时变性和本质非线性对系统的影响。与目前其他控制方法相比较,本文的方法在估计精度、控制品质等方面的性能均有所提升。虽然本文所提的方法只是对160MW火电机组进行了有益探索,但是目前在大容量机组、亚临界机组及超临界机组中普遍存在模型参数不确定性等问题,本文可以为类似的大容量火电机组的安全稳定运行、提高控制品质提供技术支持。需要指出的是,本文并没有考虑火电机组的经济性最优问题,接下来将会对如何协调火电厂的多台火电机组,针对火电机组群采用何种优化控制策略能够实现其经济稳定运行等问题进行深入研究,实现整体优化,保证其高效稳定运行。
[1] AGÜERO J L, BEROQUI M C, ISSOURIBEHERE F. Grid frequency control. Secondary frequency control tuning taking into account distributed primary frequency control[C]//IEEE PES General Meeting, 2010: 1-8.
[2] 王京景, 吴旭, 王正风, 等. 基于多目标模糊优化的抽蓄水火电联合调峰方法[J]. 电气技术, 2019, 20(11): 33-38, 45.
[3] ZHOU Wenji, ZHU Bing, FUSS S, et al. Uncertainty modeling of CCS investment strategy in China’s power sector[J]. Applied Energy, 2010, 87(7): 2392-2400.
[4] WEI L, FANG F.∞-LQR-based coordinated control for large coal-fired boiler-burbine generation units[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5212-5221.
[5] WANG Yinsong, YU Xinghuo. New coordinated control design for thermal-power-generation units[J]. IEEE Transactions on Industrial Electronics, 2010, 57(11): 3848-3856.
[6] 卓旭升, 周怀春. 一种火电机组系统非线性控制方法的实用仿真研究[J]. 中国电机工程学报, 2005, 25(20): 94-99.
[7] 王志杰, 王广军, 陈红. 基于逆模型的火电机组自适应解耦控制[J]. 中国电机工程学报, 2011, 31(29): 118-123.
[8] AFSHAR S, MORRIS K, KHAJEPOUR A. State-of- charge estimation using an EKF-based adaptive observer[J]. IEEE Transactions on Control Systems Technology, 2019, 27(5): 1907-1923.
[9] 潘海鸿, 吕治强, 李君子, 等. 基于灰色扩展卡尔曼滤波的锂离子电池荷电状态估算[J]. 电工技术学报, 2017, 32(21): 1-8.
[10] 孙兴法, 聂子玲, 朱俊杰, 等. 基于低阶串行双扩展卡尔曼滤波的永磁直线同步电机无速度传感器控制策略[J]. 电工技术学报, 2018, 33(12): 2685-2694.
[11] LE ROUS J D, STEINBOECK A, KUGI A, et al. An EKF observer to estimate semi-autogenous grinding mill hold-ups[J]. Journal of Process Control, 2017, 51: 27-41.
[12] 刘经宇, 方彦军. 基于卡尔曼滤波的汽包水位多传感器信息融合方法研究[J]. 电力自动化设备, 2008, 28(4): 28-31.
[13] 陈锐民, 张曦, 张卫东. 基于自适应EKF滤波算法的汽包水位估计方法[J]. 控制工程, 2017, 24(2): 293-296.
[14] ASTROM K J, EKLUND K. A simplified non-linear model of a drum boiler-turbine unit[J]. International Journal of Control, 1972, 16(1): 145-169.
[15] ASTROM K J, EKLUND K. A simple non-linear drum boiler model[J]. International Journal of Control, 1975, 22(5): 739-740.
[16] ASTROM K J, BELL R. Dynamic models for boiler- turbine alternator units: data logs and parameter estimation for a 160MW unit[R]. Lund, Sweden: Lund University, 1987.
[17] DU Jingjing, SONG Chunyue, LI Ping. Application of gap metric to model bank determination in multi-linear model approach[J]. Journal of Process Control, 2009, 19(2): 231-240.
Application of nonlinear decoupling method based on unscented Kalman filter in thermal power units
WANG Yonggang1SUN Yumiao1ZHANG Nannan1XIAO Ruimin1ZHANG Mingjian2
(1. School of Information and Electrical Engineering, Shenyang Agricultural University, Shenyang 110866;2. State Grid Liaoning Maintenance Company, Shenyang 110003)
In view of the strong coupling, strong nonlinearity and parameter uncertainty of thermal power units, it is difficult to use conventional control methods to effectively control them. This article first analyzes the influence of the system’s nonlinear strength and the system’s model parameter uncertainty on the system. On the basis of in-depth understanding of the dynamic characteristics of the system, the system parameters are estimated by the unscented Kalman filter (UKF) method. The above system is controlled by global linearized control (GLC) strategy. The simulation results show that the UKF method can quickly and effectively estimate the uncertain parameters of this model. In this paper, compared with the feedback linearization control method, the GLC control method could improve the control performance of the system. This model has strong robustness and could provide technical support and theoretical guidance for actual production.
thermal power unit; nonlinear decoupling control; global linearized control (GLC); parameter estimation; unscented Kalman filter (UKF)
国家自然科学基金(61673281,61903264)
辽宁省自然科学基金(2019-KF-03-01)
2020-11-03
2021-01-08
王永刚(1978—),男,副教授,主要研究方向为电力系统建模与控制。
猜你喜欢
机械管理开发(2022年1期)2022-03-24
发电设备(2020年5期)2020-10-09
中等数学(2020年2期)2020-08-24
测控技术(2018年9期)2018-11-25
通信电源技术(2018年5期)2018-08-23
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
能源(2015年8期)2015-05-26
自动化博览(2014年4期)2014-02-28
