科学家创造可用于机器人的人工神经触觉皮肤:超薄、质量轻、有粘性
2021-08-27 14:36
海外星云 2021年8期
在过去的几十年时间里,机器人专家和计算机科学家致力于人工系统的创造与开发,以越来越接近现实的方式试图让生物功能和人类能力趋近。前文提及的人工系统,包括人工智能系统和可获取各类的感官数据的传感器。
在人类想要理解物体的特性以及抓住或处理物体的时候,通常依赖于他们独有的触觉。因此,开发性能更佳、反应更灵活的机器人或假肢对于创造人类触觉的人工传感系统具有重要价值。
人类使用不同类型的皮肤受体通过压力和振动信号的组合,来检测触觉刺激。人工触觉感知系统的进步与机器人和假肢的发展密切相关,并且科学家已经创造了人工受体、神经和皮肤。然而,构建具有类人能力的系统仍然具有挑战性。

相关论文
近日,韩国成均馆大学和汉阳大学的研究人员创建了一种人工触觉传感系统,该系统模仿人类通过触觉识别周围物体的方式。
相关研究以《一种人工神经触觉感知系统》为题发表在Nature Electronics,它使用传感器来捕获与物体的触觉特性相关的数据。
该团队在论文中报告,“我们开发了一种人工神经触觉皮肤系统,该系统使用基于粒子的聚合物复合传感器和信号转换系统来模拟人类触觉识别过程。
传感器有选择地响应压力和振动,类似于人类皮肤中的慢速自适应和快速自适应机械感受器,并且可以产生类似感觉神经元的输出信号模式。”
研究人员表示,“在体外测试中发现,输出信号通过传入触觉小鼠神经纤维的无失真传输是可能的,而在体内测试中,信号可以刺激大鼠运动神经以诱导后肢肌肉收缩。”
生物感觉系统通过“体感转导过程”将触觉刺激转化为动作电位,随后,再通过传入神经将这些信号传输到大脑。
研究人员表示,“我们使用人类的触觉传感系统开发了一种人造手指,它可以通过将传感器信号与深度学习技术相结合,来学习对精细和复杂的纹理进行分类,该方法还可用于基于训练模型预测未知纹理。”

模仿生物系统的人工触觉系统
为了模拟人类的触觉系统,该团队使人工神经触觉皮肤通过传感器对压力及振动做出相关的反应,在人类皮肤中复制了慢适应和快适应机械感受器的功能。他们收集的数据类似于人类感觉神经元收集信息的方式,因此,它们最终会产生类似人类的触觉神经信号。
论文指出,该系统由T型皮肤薄膜组成,其中导电压阻和压电颗粒排列在弹性聚合物基质中。这些薄膜超薄(<120μm)、重量轻(15mg cm-2)且具有粘性,因此非常类似于真实的人类皮肤。
为了评估他们的人造皮肤系统,并证明它可以整合到真实的生物系统中,研究人员在一系列小鼠实验中对其进行了评估。
研究人员表示,“这些实验包括传入神经的体外传递测试和通过刺激传出神经进行的体内肌肉反应测试,这两个实验的结果证实了将系统集成到真实生物系统中的可能性。”

具有颗粒聚合物复合材料的仿生T型皮肤传感器
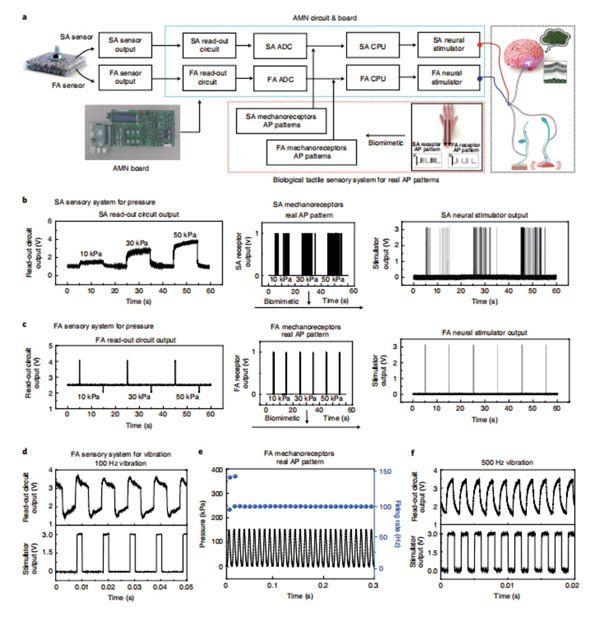
信号转换系统将传感器信号转换为感觉神经元模拟信号
除了通过将人造皮肤与真实生物系统集成来测试他们的人造皮肤外,研究人员还评估了其分析和识别表面纹理的能力。
为此,他们在T型皮肤设备上层压了模仿人类指尖结构的人造脊。“我们发现该系统可以感知复杂的纹理图案,并且将其与可以对表面结构进行分类的深度学习技术相结合,实现了惊人的99.1%的纹理分类准确率。”研究人员表示。
未来,这组研究人员开发的人工触觉传感系统可以与现有或新开发的机器人系统集成,以复制人类的触觉。这可以显著提高他们在涉及触摸、抓取和操縱物体的任务中的表现。(摘自美《深科技》) (编辑/华生)
猜你喜欢
哈哈画报(2021年11期)2021-02-28
科学大众·小诺贝尔(2020年4期)2020-07-20
保健与生活(2019年7期)2019-07-31
小资CHIC!ELEGANCE(2018年33期)2018-11-08
Coco薇(2017年8期)2017-08-03
红豆(2017年4期)2017-04-13
家教世界·创新阅读(2016年9期)2016-05-14
Coco薇(2015年5期)2016-03-29
电脑爱好者(2015年17期)2015-09-10
科学启蒙(2009年12期)2009-12-15