基于LED的水下光无线通信技术探究
2021-08-26 08:13闵亚洪
通信电源技术 2021年8期
闵亚洪
(江苏省江阴中等专业学校,江苏 无锡 214433)
0 引 言
地球的海洋面积约占70%左右,是人类赖以生存的重要环境之一,而随着无线通信技术的发展,基于水下光无线通信技术研究已经成为提升通信技术可靠性和安全性的核心技术领域[1]。但是无线通信技术在水下传输环节容易出现信号的分散,因此探究新型水下光无线通信技术具有重要的价值[2]。本文在此基础上探究基于LED水下光无线通信技术系统的设计与实现,希望可以为水下光无线通信技术的完善提供可行性借鉴。
1 基于LED的水下光无线通信传输特征分析
水下光通信时会受到光束扩散的影响,发射光经过准直处理降低发射角。但是在海水的影响下会导致光束的扩散,尤其是在长距离的传输中对水下光的影响更为显著[3,4]。在水下光损耗中,根据泰勒级数tanθ≈θ可知。其损耗的表达为:

式中,z表示传输距离;Dt表示发射孔径;Dr表示接收孔径直径;θ表示发散角。其中,r、z和θ之间的关系为:

通过式(2)发现,在传输距离增加时,r会逐渐增大,而在固定传输距离时,r会随着θ而变大。
如果光源较远,则需要确定系统损耗[5]。可见光损耗与传输距离之间存在线性化关系为:

2 基于LED的水下光无限通信系统设计
2.1 系统结构设计
在基于LED的模式下,需要实现通信系统的结构设计,主要包括发射机、无线信道以及接收机几个部分[6]。系统结构如图1所示。

图1 系统结构设计图
系统设计中,通过上位机FPGA的RS编码设计可以提升系统的抗干扰能力,同时将脉冲信号输送到LED电路,之后抵达接收端,最后经过软件滤波处理后传递到PC机[7]。
2.2 系统软件MDPCM解调的FPGA选择
本次研究系统软件的选择方式中,应用MDPCM解调的FPGA软件模式。其中FPGA的芯片型号选择INTEL公司生产的EP4CE6322C8N。MDPCM属于衍生产品,采用FIFO缓存调制模式,经过输出处理,会形成DPCM-OUT波形。
在解调环节,需要实现软件滤波器的功能,在HDL设计以及D触发器的基础上实现滤波处理。在MDPCM解调环节,采用最大似然概率判定模式,基本表达式为:

经过系统判定及解调原理判定计数位于的区间,进而输出解调数据。
2.3 系统电路设计
系统电路的设计包括光源、驱动电路以及UART电路等多个环节,本次研究对核心电路进行设计,主要内容如下。
2.3.1 LED驱动电路
系统经过FPGA解调后,信号通过I/O接口,电平设计为3.3 V,电流最大限流为40 mA,通过驱动电路中的三极管以及MOS管可以实现功率放大[8]。本次研究中,LED光源驱动电路如图2所示。
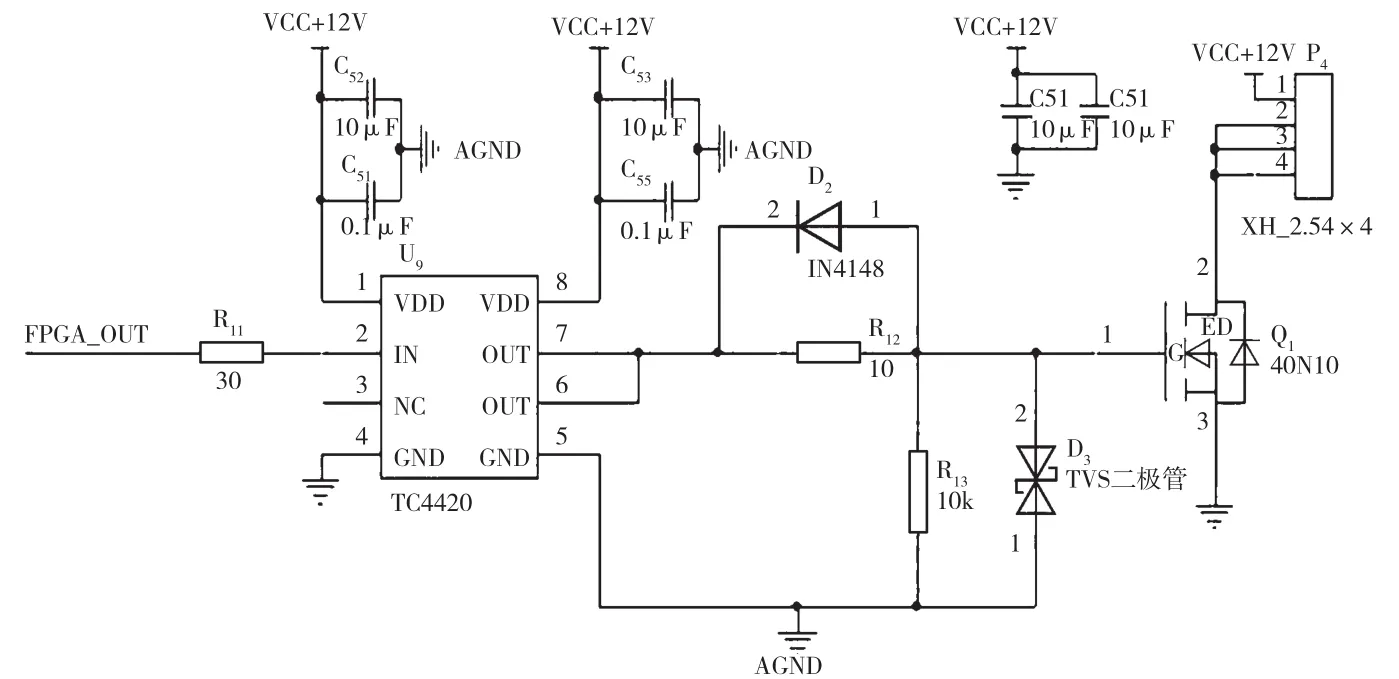
图2 LED光源驱动电路设计图
本次研究中,选择NMOS的型号是SUD40N10-25-E3,击穿电压和电流分别为100 V和40 A,电路会将电信号转化成为光信号来传输信息。
2.3.2 光电探测器选型及放大电路的设计
光电探测器属于光信号和电流信号的转化装置,常见探测器包括光电晶体管、光电倍增管以及光敏电阻等。本次研究中,基于PIN管的优良转换性特征,选择滨松公司的S6968型号光电探测器,接收直径和面积分别为14 mm和150 mm2,频率为50 MHz[9]。
对于整体放大电路的设计,在接入PIN管后,需要转换电路的整体电流和电压,以此来确保电路的功能。第一级别电路需要确保噪声相对较小的原则,因而选择集成的跨阻前置放大器来进行转换。该模块具有光导和光伏的运行模式,在工作时,PIN管具有方向电压,会导致电容变小,之后在光电探测器的影响下会产生干扰电流,影响接收机的运行。因此,在选择S6938模式的基础上采用光导的运行模式。系统电路结构如图3所示。

图3 系统放大电路设计图
在系统放大电路的设计中,采用OPA228实现对信号的转换,然后通过电阻R13和R14计算反馈电阻。在放大电路的设计中,会在电阻上设计反馈电容,通过集成的方式实现补偿,之后对各级电路进行放大,另外采用±5 V的供电模式。
2.4 基于带通滤波和脉冲整形阶段的电路设计
在系统接收体系的建设中存在噪声元件,因此在信号放大环节,为了确保通信质量,需要消除噪声[10]。基于此,本次设计中采用四阶巴特沃斯滤波器,频率设计在3~30 kHz,整体上限频率设计为30 kHz,电容为680 pF,根据仿真的原则确定该选择符合系统的运行需求。
在接收信号时,系统需要通过FPGA的方式来进行解调,将信号转换成为模拟信号,但由于FPGA在系统的运行环节并无识别的功能,因此首先需要将信号转化成为数字信号。在本次设计中,采用电压比较器来进行信号模式的转换,型号为LM393,具体的电路设计如图4所示。在系统高电平的数值为1时,低电平为0,模拟信号会通过比较器来实现信号的转换,而电阻则为2~10 kΩ。在函数信号中,输出信号存在180°的相位差,因此需要对信号进行反相处理。

图4 脉冲整形阶段电路设计图
3 系统测试
3.1 串口、发射和接收阶段的测试
在串口测试阶段,通信协议选择RS232,之后应用字节的方式来接收数据。模块主要包括发送模块和接收模块,通过下载FPGA接收代码,验证串口调试成功。
在本次设计的发射模块中,通过USB的方式实现PC及RS232串口连接。信号转换环节通过FPGA方式进行转换,将二进制8位转换成为4位,之后对RS进行编码。处理过程中,转码完成后,经过MDPCM进行调制处理。将频率设为200 kHz,经过调制,完成信号的转换。此外,发射端的调试中主要结构包括PC、电源、示波器、LED以及发射电路,同时包括FPGA和UART模块。
接收模块主要负责实现光电信号的转换,在本次设计中,采用S6968信号的转换器,接收电路信号后会对信号进行处理,之后输入FPGA。在数据信号的处理过程中,应用软件的滤波处理模式实现对尖峰脉冲信号的调整,然后在FPGA的模块中设计对应的解调解码,恢复数据,并将信号传递到PC端。
在接收模块的设计中,主要包括同步、滤波、解调、串口以及解码等环节。发射端和接收端之间会存在相差,并且达到180°,因此在接收数据完成后,需要对数据进行反相处理,最终确保数据的一致性与准确性。RS解码阶段,IP参数方式存在一定的差异,需要将reset的代码拉高,之后在解码时实现复位处理,否则将会导致出现解码异常。在频率调整环节,将频率设计为200 kHz,信号主要是通过MOS管来调整波形,最后通过放大电路形成具体波动图形。
3.2 实验测试结果
本次研究基于清澈海水,海水中包含溶解盐及悬浮颗粒,并且氯化钠的含量达到90%以上。为了测试系统的性能,了解在水下的运行准确率,在发射阶段循环发送1到F的十六进制数字,通过系统RS解码方式将数据划分为3个组别,之后对数据进行编码。在每组数据中设计超帧,调制完成后,应用LED阵列发送数据,根据接收的数据和发送的数据对比,确定解码的准确率。实验过程中需要对数据进行多次测试,在溶解盐的影响中发现500 kHz的环境下自来水的误码率为7.45×10-6,7%溶解盐中的误码率为6.32×10-6,15.56%溶解盐中地误码率为5.85×10-6,总体并无显著的差异,其可能是由于溶解盐会对较短的波长进行吸收,而不会对LED可见光产生一定的影响。
在悬浮颗粒的影响方面,确定海水的悬浮颗粒对测试结果的影响。在水质中加入氢氧化铝和氢氧化镁的混合物,频率设计为500 kHz。在清水测试时,并无明显的差异,而在浑浊度达到40 g/m3的情况下,数据的错误率相对较高。其中,在500 kHz的环境下,自来水的误码率为8.25×10-6,16.13 g/m3浑浊度的情况下,误码率为6.02×10-4,24.19 g/m3浑浊度的情况下,误码率1.56×10-2,在40 g/m3的情况下,系统出现丢帧的特征。可见,悬浮颗粒对于系统的准确率具有显著的影响,因此在使用系统环节,需要对水质的环境进行分析。
4 结 论
本文主要探究水下光无线通信传输系统的设计与实现,首先确定系统结构设计,包括上位机、发射机以及接收机等几个组成部分,软件系统采用MDPCM解调的FPGA,此外在系统电路设计中设计了LED驱动电路、放大电路以及脉冲整形电路等核心电路结构。其次,对系统进行测试,发现发射和接收阶段达到测试目标,并且溶解盐浓度对测试结果并无显著影响,而悬浮颗粒浓度在40 g/m3以上时则容易造成丢帧,影响信息传输。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
建材发展导向(2021年18期)2021-11-05
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
南方周末(2019-12-19)2019-12-19
中国外汇(2019年19期)2019-11-26
南方周末(2019-07-18)2019-07-18
南方周末(2019-05-09)2019-05-09
现代电子技术(2016年22期)2016-12-26
移动通信(2016年20期)2016-12-10