超声波内外窗擦窗器研究
2021-08-23 01:56袁鑫张宏卓闫鸿鹏于捷
时代汽车 2021年15期
袁鑫 张宏卓 闫鸿鹏 于捷
摘 要:为应对居家生活以及写字楼擦窗户的繁琐性和危险性,于是我们基于机械摆动机构和齿轮机构,并结合超声波理论、电磁学、美学等设计出来一款超声波内外窗擦窗器。通过摆动机构、连杆机构、超声波系统来实现玻璃的内外自动擦洗,这款设计即可以省时省力,又降低危险系数,极大的方便了人们的生活。
关键词:全自动 超声波 擦窗器 智能家居
Research on Ultrasonic Window Cleaner
YuanXin,Zhang Hongzhuo,Yan Hongpeng,Yu Jie
Abstract:To deal with the cumbersomeness and danger of cleaning windows in home life and office buildings, the article designed an ultrasonic inner and outer window cleaner based on mechanical swing mechanism and gear mechanism, combined with ultrasonic theory, electromagnetics, and aesthetics. With the help of the swing mechanism, the linkage mechanism, and the ultrasonic system, the automatic cleaning of the inside and outside of the glass is realized. This design can save time and effort, and reduce the risk factor, and greatly facilitates people's lives.
Key words:automatic, ultrasonic, window cleaner, smart home
1 引言
基于市场的需求,我们设计了这款超声波内外窗擦窗器。该产品将简单机械原理与电学相结合,根据材料的特征特性,对各个所需零件构件材料进行挑选与实验,结合材料力学、机械连接制造设计等知识研究出一系列的运动,达到对窗户的内外表面进行自动擦洗。其中机械部分主要是使用零件与零件或者构件与构件之间进行连接,包括齿轮连接、连杆机构、摆动机构或曲柄机构。通过对自由度的计算,完美的设计了构件之间的连接方式,从而达到最方便用户的连接模式;与此同时还通过实体调研与反复的测量,对结构进行运动分析,最终确定了相应数据,达到了完美的运动效果以及理想的擦洗结果。
最后也通过美学设计,提供给用户更好的体验感,同时也使产品具有更大的吸引力。此设计极大地方便了用户的家居清洁生活,增强了用户的体验感,降低了用户擦窗的危险系数。同样把产品设计成折叠结构,这样也不会占用多余空间。并且使用防腐耐用的材料,可以持久使用。这样用户可以实现在室内轻松安全地擦窗户的内外面,极大地提高了工作效率,省时省力省经济,是一款极其方便的智能家居。
2 超声波内外窗擦窗器的设计
2.1 擦窗器的功能原理
擦窗器使用电动机为系统提供动能,通过齿轮转动,从而带动连杆使其终端的毛毡多自由度运动,辅以超声波对玻璃表面污物层的分散、乳化、剥离,达到相较于纯机械作用更高效的清洁效果。使超声波内外窗擦窗器实现自动化,最终使各结构完成其相应动作。通过机械结构设计,系统可自动化对末端位置进行调整,实现大面积平面清洁作业。
2.2 结构内容
擦窗器的结构包括:(1)齿轮正反转机构:齿轮正反转机构通过转动,来带动整个机器的上下移动,我们设定,大齿轮半径为30mm,为p=1.965,齿轮模数m=p/π=0.625,齿数为48,传动比为1:1,小齿轮半径50mm,为p=1.965,齿轮模数m=p/π=0.625,齿数为19,传动比为2.5:1擦窗器由齿轮正反转机构转动运行,齿轮正反转机构以及擦窗器之间有皮带相連。此齿轮正反转机构在转动时,固定点被其带动,来带动整个擦窗器的上下移动,移动范围包括整个窗户,这样子就可以轻松地擦动整个窗户,来达到全自动擦窗的目的。
(2)摆动机构:摆动机构与第二根连杆相连,圆周摆动带动第二根连杆,实现了连杆机构及其刷头的自动化连续运动,在摆动机构带动的过程中连杆机构与刷子运动需要一定时间,这样子为超声波擦窗器的刷头震荡在窗户上的污渍取得了一定的时间,可以更加高效完美的清除其在窗户上的污渍。
(3)连杆机构:用连杆机构来带动刷头进行自动化擦窗往复运动,第一根连杆起到固定作用,来固定摆动机构以及第二根杆的一端,第二根连杆连接第一根连杆的固定端与刷子刷头部分,与摆动机构相连,实现自动化往复运动,第三根连杆其作用是固定刷头,大毛毡以及超声波发生器来实现全面无死角的擦窗自动化运动。
(4)电动机:为了实现完全的自动化擦窗,我们会在齿轮处以及摆动机构处的内处安装电动机来实现齿轮的自动转动来带动整个机器的上下移动和摆动机构带动连杆处的往复运动来实现擦拭窗户动作的自动化实现。
(5)超声波发生器:更好的起到清洁效果。
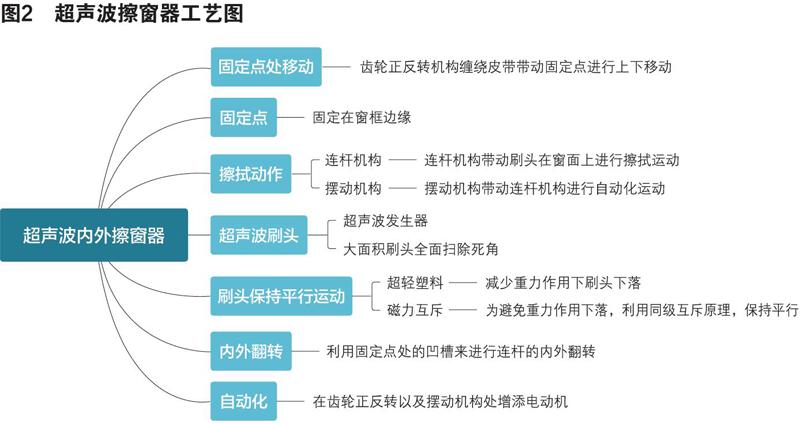
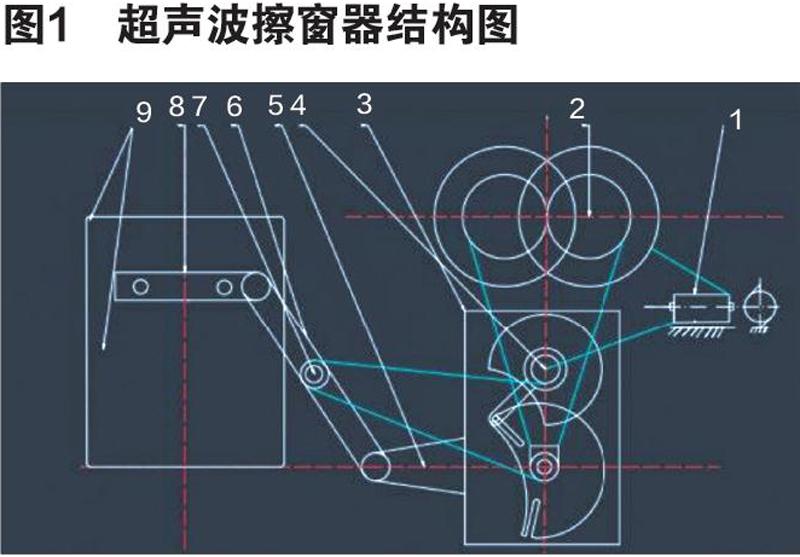
结构图如图1所示;具体工艺如图2所示。
2.3 工艺动作设计
我们利用齿轮2的正反转机构缠绕皮带来带动固定点的上下运动,令齿轮转动并通过皮带的连接来带动整个机器,完成擦拭整个窗户的动作。此外我们将擦拭动作分为两个机构连杆机构以及摆动机构。通过连杆机构带动刷头在窗面进行自动化往复的擦拭运动,连杆机构将会带动刷头进行自动化擦窗运动,第一根连杆5来固定摆动机构并与第二根连杆6起到相互连接的作用,第二个连杆则与摆动机构之间链接,电动机提供动能给摆动机构,从而使摆动机构带动第二根连杆,并且将第二个连杆与第三根连杆8相连,一系列运动后最终实现刷头9以及超声波发生器来全面无死角的擦拭窗户。而其中的摆动机构则是通过滑块带动连杆机动机构而进行自动化运动,摆动机构因为其特性,并使用超声波发生器震荡,这样可以为更好的消除窗户上的污渍获取获得一定时间,从而起到更加高效完美的清洁效果。
与此同时,将会在齿轮正反转机构以及摆动机构中安装电动机,将电动机中的电能转化为动能提供给各结构,来彻底的实现擦窗的自动化。并且,为了使第三根连杆避免因重力作用而产生一些不稳定因素,我们将会在第三根连杆上采用超轻塑料材质,同时我们将会在第三根连杆左右两端,分别加上同极磁铁,用同极互斥的电磁原理,来保证第三根连杆保持平行。
在考虑到擦窗器需要进行上下的移动来进行擦拭窗户,我们为此采用了齿轮正反转机构并通过皮带来连接固定点使其进行上下的运动,当机构在窗户边缘进行上下移动时,窗户上的玻璃也在被来回擦拭。与此同时,我们将会在固定点处的滑块上,设计一个凹槽,来实现整个擦窗机器由内向外的翻转,通过凹槽来实现滑行,保证擦窗器进行擦窗内外窗时可以进行有效的反转,并且,我们也考虑到了现代生活的极简性,以及储存空间的有限性,我们将连杆设计成可折叠状态,使用后可以折叠起来减小体积,因此大大减小了整个机构所需要的空间。
2.4 材料选用
考虑到经济设计,安全设计和环保设计。我们决定采用硬质塑料作为总体材料基调。这是一种新型高性能热塑性树脂,具有机械强度高、耐高温、耐化学药品性、难燃、热稳定性好、电性能优良等优点。同时在电子、汽车、机械及化工领域均有广泛应用。
3 结语
这款超声波内外窗自动擦窗器,可以自行擦拭运动,简单方便,主要有三个机构组成,分别为齿轮正反转机构,摆动机构以及连杆机构,另外也利用了电动机和电磁等主要部件。利用超声波发生器达到更好的清洁效果,连杆机构的运动可以改变力臂与窗户角度以及伸缩工具的杆长,并且使用大毛毡达了到全方面无死角擦窗户的目的。这款擦窗器没有任何的安全隐患;还可以实现极简收纳,减少占用的空间;同时也使用了环保材料;还可以安静地完成工作。这种擦窗器市面未见,做工精细,使用方便简单,安全系数高,经济实惠,性价比很高,创新性较大,有较强的市场竞争能力。
参考文献:
[1]孙恒.机械原理.高等教育出版社.2013(05).
[2]苗忠.机械综合课程设计.吉林科学技术出版社.2011(05).
[3]符炜主编.机械创新设计机构思方法.湖南科学技术出版社.2019(01).
[4]张春林,曲继方,张美麟编著.机械创新設计.北京机械工业出版社.2019(04).
[5]郑建荣主编,ADAMS-虚拟样机技术入门与提高,北京:机械工业出版社.2001(11).
[6]刘鸿文主编,《材料力学》,北京:高等教育出版社.2017(07).
[7]朱孝录主编,《机械传动设计手册》,电子工业出版社.2007(07).
[8]《全美经典》,机械工业出版社.2002(08).
猜你喜欢
锦州医科大学报(2022年2期)2022-05-07
中国典型病例大全(2022年7期)2022-04-22
计算机应用文摘·触控(2021年11期)2021-07-14
计算机与网络(2021年8期)2021-06-20
互联网经济(2019年7期)2019-08-12
故事大王(2019年4期)2019-05-14
小天使·六年级语数英综合(2018年10期)2018-10-15
军事文摘·科学少年(2016年7期)2016-09-20
Coco薇(2016年7期)2016-06-28
小火炬·阅读作文(2014年6期)2015-04-07