固态雷达+虚拟AIS: 解决船舶可见最后盲点
2021-08-23 01:50毛新健任子俊
航海 2021年4期
毛新健 任子俊


摘要:为了保障船舶航行安全,降低船舶碰撞风险,解决恶劣天气能见度不良情况下,AIS船舶与未安装AIS船舶可见的最后盲点,东海航海保障中心在洋山港开展基于固态雷达+虚拟AIS的小目标系统试点建设。
关键词:固态雷达;虚拟AIS
为保障船舶航行安全,维护船舶通航秩序,降低船舶碰撞风险,船舶可见无疑是最主要的保障手段。随着信息技术发展,船舶可见也由原始的目视可见发展为在信息系统中实现船舶可见,极大扩展了船舶可见范围,而雷达和AIS无疑是实现船舶可见的两大关键系统。雷达依托发射电磁波对范围内的目标进行照射并接收其回波,由此获得目标至雷达间的距离、距离变化率、方位、高度等信息,即发现目标并测定空间位置,从而提供给航行船舶或海事监管实现目标可见。AIS船舶自动识别系统,通过GPS将船位、船速、航向等船舶动态信息,结合船名、呼号、装载货物等船舶静态资料,由VHF甚高频向附近水域广播,使邻近船舶及岸台能及时掌握附近水域所有船舶信息,从而实现船舶可见,有效保障船舶航行安全。
尽管雷达和AIS已是目前实现船舶可见最主流的信息系统,但都存在着一定缺陷。传统航海雷达使用最为广泛的脉冲磁控管雷达,在雨雪海浪天气条件下雷达回波中的杂波剔除能力不如人意,因此恶劣天气情况下,对快速移动中的小目标难以精确探测,无法实现周边水域船舶目标完全可见。至于AIS,尽管不受天气状况影响,但由于国际海事组织以及我国海事部门尽管已对各类船舶强制性安装AIS终端作了明确要求,但目前仍不是所有船舶都安装了AIS终端,安装了AIS终端船舶和并未安装AIS终端船舶无法依托AIS实现可见,仍然存在最后盲点。
尽管在常规情况下,通过现有雷达和AIS系统已经可以实现船舶可见,有效降低船舶碰撞风险,但在一些特殊水域,如上海洋山港,船舶流量密集,各类船舶聚集交汇,通航条件较为复杂,依然存在一定的安全隐患,如图1所示。
洋山港是我国推进“一带一路”倡议的重要支点,在上海国际航运中心建设中起到核心支撑作用。洋山港位于东亚季风盛行地区,全年风向多样风速较大,波浪潮汐相对也大,容易出现大雾雨雪天气,能见度不良情况频繁,受台风影响也极为显著,所以对传统雷达干扰较为严重,如图2所示。洋山水域作为沿海海上干线南北聚集交汇航路,周边密布传统渔业作业区,从而形成大、中、小型船舶和渔船水上交通聚集交汇状况,船舶通航密集。而小型渔船AIS终端安装率较低,因此安装AIS的进出港船舶与未安装AIS的渔船无法可见,存在船舶碰撞的安全风险。
东海航海保障中心以实践国家战略、服务航海保障为己任,依托新型固态雷达和虚拟AIS技术,完成洋山港水域小目标系统的试点建设,一定程度上解决洋山港水域船舶可见避碰最后盲点的安全隐患。
1 固态雷达
固态雷达是近年来已得到迅速发展的一种新型雷达,具有体积小、功能多、机动性强、可靠性高的优势,常用于机载、舰载和地面雷达,如图3所示。
传统的脉冲磁控管雷达,通过调制器产生的调制脉冲传送至磁控管,引发磁控管产生大功率超高频率的脉冲波,这种射频脉冲波经过天线向四周发射,在射碰目标实体后弹回的反射波再次被天线接收,后端接收机对反射波信息经过处理,将信号以视频信号的方式显现出来。因此传统脉冲磁控管雷达中最主要的部位就是磁控管。而新型固态雷达却没有磁控管,取而代之的是固态器件。固态雷达信号发射和传统雷达一样,但接收后的信号不仅要经过接收机处理还需要经过脉冲压缩器的处理,之后才能将信息呈现在显示屏上。
传统脉冲磁控管雷达发射的是大功率脉冲波,功率可覆盖1 kW~3 MW;而新型固态雷达发射的是低功率射频脉冲,最大功率可低至200 W左右。发射的信号经过接收机和脉冲压缩器处理,形成高倍数的压缩信号,可以与传统雷达所发射的大功率高频率的射频信号相媲美。
雷达探测距离可分为远、中、近不同距离,不同的探测距离要求也不一样,固态雷达可发射长、中、短不同的特定射频脉冲来满足这些要求。同时,为使脉冲更容易被压缩,通常采用脈冲宽度和编码混合的方法,这样可以保证每次发射的脉冲在长度和编码上都有差异。在处理回收脉冲信号时,可以高效判断目标的存在状况。
此次在洋山港水域安装应用的新型固态雷达相比传统脉冲磁控管雷达有了巨大的改善,不仅可检测雷达与目标之间的相对速度,而且能够十分有效地将回波中的杂波剔除出去,从而确保在海浪雨雪等恶劣情况下,对移动中的小目标进行精确探测。
2 虚拟AIS
AIS是通过VHF海上移动频段通信协议交换航行数据的通信系统,通过自动发送和接收船舶信息实现了船舶可见,现已成为船岸、船船之间的海事安全与航海保障最重要的助航系统。
根据国际电信联盟M.1371规定,AIS利用预定电文进行通信,保证全球通用。标准的AIS电文分为27类,不同的电文代表不同的含义,大部分电文与航行信息的传达有关,也有部分电文用于专门应用或系统管理功能。
AIS分为实体AIS和虚拟AIS两种。安装有真实AIS终端,发送通过传感器所采集的真实信息,周边船舶AIS终端可接收到该信息,信息和实体一致,即为实体AIS,而没有真实的AIS终端,而由AIS基站根据特定的程序和协议,发射在其覆盖范围内,由人员和系统自行虚拟的AIS信息,周边船舶AIS终端可接收到该信息,即为虚拟AIS。目前虚拟AIS已在航标、渔场、水文站、风电场等领域得到广泛的应用。例如虚拟AIS航标,在设置真实航标不可能或不可行的情况下,通过AIS基站发射21号电文,设置实际航标并不存在的虚拟AIS航标对危险物、障碍物、关键点进行标绘,确保过往船舶AIS船载终端可见,从而保证通航安全。
3 洋山港小目标系统建设
东海航海保障中心的小目标系统,正是针对洋山港交通流量最大,环境流向复杂的警戒区及其主航道、金山航道和东支航道向外延伸水域,整合了固态雷达和虚拟AIS技术,从而实现该水域小目标的扫测跟踪显示,如图4所示。
设备选型选用了丹麦的TERMA SCANTER 2202固态雷达(见图5),是基于固态发射机技术的X波段二维全相干脉冲压缩雷达,具备长使用时长和高可用性,内置嵌入式跟踪器ET2,即使在恶劣天气条件下,也能对敏捷和小目标进行精准检测和跟踪,见表1。
固态雷达的安装位置关系着雷达作用功效,在经实地勘察和反复分析后,最终选定于小洋山沈家湾码头建筑顶部进行固态雷达安装。该位置位于洋山港主内航道前端,视野开阔,距离设定覆盖面最长距离16 km左右,最短距离1 km左右,扇面210°,具有稳定的电力资源,以及人员值守,建筑顶部地面平坦宽阔,适合固态雷达的安装应用,见图6。
根据雷达的工作原理,雷达最大探测距离取决于雷达天线架设高度和目标高出水面高度,近距离盲区取决于雷达垂直波束宽度和天线架设高度,最大作用距离取决于天线发射脉冲功率、天线增益、工作波长、接收机功率和目标雷达截面积。经测算,沈家湾固态雷达各性能指标均符合设计要求,见图7。
TERMA SCANTER 2202固态雷达内置嵌入式跟踪器ET2采用最先进的跟踪算法,可自动识别雷达图像中的目标回波,并将每个回波目标的运动标注为具有相关轨道参数的确认轨道,见图8。
当回波强度超过设定的视频阈值,则ET2就开始生成和更新跟踪信息。ET2给识别目标分配唯一ID号,并确定位置、速度和运动状态等相关特征,并根据其运动状态,预期其运动趋势,例如匀速运动、加速转弯等,从而跟踪每个目标的轨迹,并将这些信息提供给雷达图像呈现。
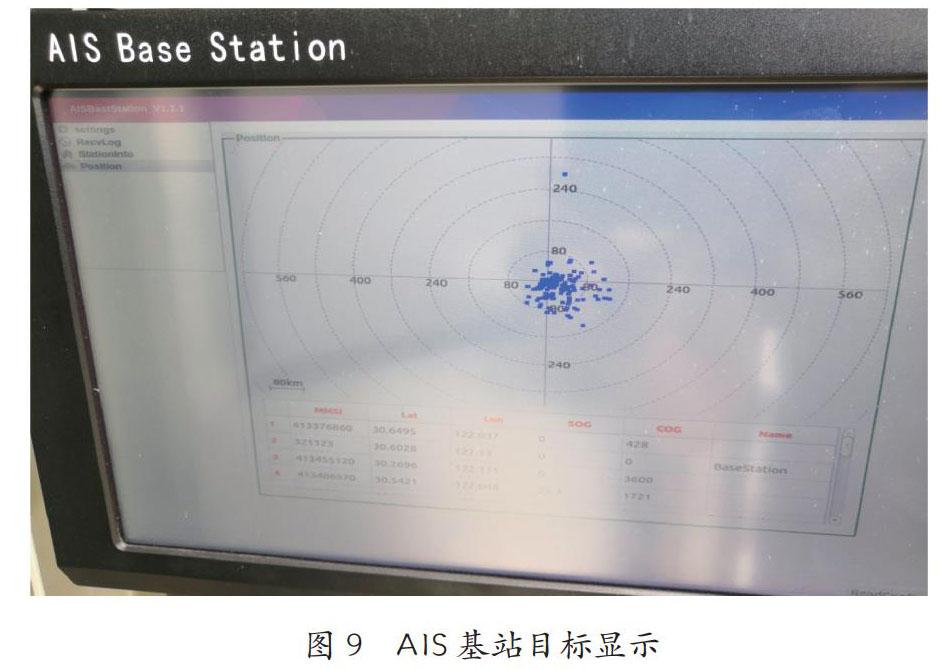
后端配套的AIS基站选用的是国产标准AIS基站,同样部署于沈家湾码头建筑顶部,通过拉距测试,证实该AIS基站可与周边30 km的AIS船台进行正常信息交互,完全满足系统信号覆盖距离要求,见图9。
雷达服务器将信息进行筛选和提取,排除杂波、航标等已知信息目标,形成未知小目标列表矢量化入库,与AIS基站实时接收的AIS数据进行融合比对。该位置雷达跟踪目标同时匹配到AIS信息,则自行丢弃该目标;如无法匹配同位置的AIS信息,则AIS服务器将雷达矢量数据,封装成标准的AIS电文,并通过AIS基站预定程序对外播发虚拟B类船舶AIS信息,至AIS基站覆盖范围内所有安装有AIS终端的船舶,确保AIS船舶可以“看见”周边水域未装AIS终端的船舶,以便识别避让,如图10所示。
虚拟B类船舶AIS信息采用载波侦听方式进行播发,以18号电文播发位置报告。为了与真实船舶AIS信息相区别,系统设定以100开头的6位数字代码代表MMSI九位码,时戳采用岸上时间同步器提供时间,播发频率默认30 s,可根据需求自行调配。除了经纬度位置信息外,AIS电文还提供船首向、航速、航向等相关信息。同时利用VHF天线高度、增益、播发功率控制AIS基站的播发范围,确保范围默认略大于固态雷达监控范围,以便于大中型船舶在进出警戒水域前提前获取AIS基站播发的小目标模拟AIS信息,从而提高警觉避免碰撞,如图11、图12所示。
4 系统效能测定
洋山港小目标系统完成建设后,为验证系统效能,对雷达的检测能力和分辨能力进行测定。
4.1 雷达检测能力
测试工具:木质小船,10 m2反射器
测试方法:将雷达脉冲长度调为长脉冲,雷达状态与控制“捕捉范围”设为10 n mile;测试船舶沿着雷达站径向由远而近或由近而远,在雷达10 n mile左右开展测量。在雷达服务工具软件RST上观察木质小船上反射器的回波,每次连续观测10个天线扫描,并重复进行3次。当目标发现概率为90%(即在10次天线扫描中能有9次左右出现在显示器上),在RST上测得目标距离R即为雷达的检测能力。
测试结果:
4.2 雷达分辨能力
測试工具:木质小船,10 m2反射器
测试方法:将雷达脉冲长度调为短脉冲,调节增益使木船的发现概率不低于90%(即在10次天线扫描中能有9次左右出现在显示器上)。探测结果见表2。
A.距离分辨力:
在规定的显示量程上,使两目标处于雷达同一方位上。彼此间距大于50 m之处。逐渐缩短两目标之间距离间隔,在RST上观察到两目标回波相切时,用测量绳测出两目标之间的距离;重复以上动作,测试5次左右,以平均值作为目标的距离分辨力。
测试结果见表3。
B.方位分辨力:
在规定的显示量程上,使两目标到雷达的距离相等,逐渐缩短两目标之间角度间隔,在RST上观察到两目标回波相切时,用测量绳测出两目标之间的距离,同时在RST上测出目标到雷达的径向距离;重复以上动作,测试5次左右,以平均值按目标距离换算成平均最小角度间隔作为雷达的方位分辨力。测试结果见表4。
根据测定,得出结论:Scanter2202固态雷达系统在有效覆盖范围内,能对10 m2探测球进行准确探测,雷达探测距离≥9.8 nm,距离分辨力≤20 m,方位分辨力≤0.5°(3 n mile量程),符合系统设计要求。
洋山港小目标系统完成建设后,系统运行稳定可靠,一定程度上解决了洋山港警戒区及其主航道、金山航道和东支航道向外延伸水域,在能见度不良情况下,船舶可见的最后盲点,为保障洋山港水域船舶航行安全,维护船舶通航秩序,降低船舶碰撞风险起到较好的辅助作用。
作者简介:
毛新健,(E-mail)13917321060@139.com,021-6846286
任子俊,(E-mail) ren.zijun@coscoshipping.com,021-65968292
猜你喜欢
上海理工大学学报(2021年3期)2021-07-20
陶瓷学报(2021年1期)2021-04-13
陶瓷学报(2021年1期)2021-04-13
水上消防(2020年5期)2020-12-14
金桥(2018年4期)2018-09-26
智能城市(2018年7期)2018-07-10
交通与港航(2018年1期)2018-02-27
导航定位学报(2015年2期)2015-06-05
河北环境工程学院学报(2012年1期)2012-03-20