海上救助力量调派优选计算方法 推导与思考
2021-08-23 01:50张亮
航海 2021年4期
摘 要:在海上救助中,救助力量的选派工作基于“就近、就快”的原则,对位置不变的遇险单元,救助单元的选派工作比较容易。而对于运动中的遇险单元,依照“就近、就快”原则是海上拦截问题,进行救助单元的选派将比较困难,通常使用绘图推算的方式。本文根据航迹计算知识,推导数学计算方法,旨在对选派工作给出数据化指导,为救助指挥智能化、可视化提供数据参考。
关键词:海上救助;海上拦截;救助智能化;航迹计算
0 引 言
目前,救助指挥部门的指挥系统主要通过沿岸AIS基站和卫星基站采集船舶信息的通用公共网络软件实现监控指挥,或接入海事交管部门提供的平台来进行监控指挥。然而,这些软件系统主要功能是对船舶交通流的监控管理,对于海事交管部门和港口引航部门有重要作用,但对于海上救助指挥缺乏参考性,无法满足辅助决策功能。为此,如果可以将专业救助船舶、海事公务船、海警公务船、海上救助志愿者船舶、救助航空器等救助单元的位置和救助能力进行统计,结合遇险单元的位置、遇险类型等情况,再通过利用计算机对数据进行处理、计算、分析,如果根据救助单元是否可以灭火、是否可以清污、是否可以拖带、抗风浪等级、吊篮转运人员的克令吊工作范围等作为针对不同遇险类型的选派参考,通过计算对不同位置的救助单元到达救助現场的时间进行计算,给出“就近、就快”的救助力量选派方案,将为救助力量的组织调派提供直观、便捷的智能化指导。
1 救助单元的选派原则和遇险单元运动状态
1.1 救助单元的选派原则
救助指挥部门接到指令后,将以“就近、就快”的调派原则,第一时间确定执行救助任务的救助单元。特别是对于海上人命救助,快速协调选派救助单元,救助单元在最短时间内到达救助现场是人命救助成效的关键。在救助中“就近”选派原则,即是选择离救助现场近的救助单元。对于不运动的遇险单元,救助现场的位置是不变的,通过量取将容易确定选派救助单元。周边的船舶对该救助现场水域航道、碍航物及水文气象更为了解,且可早到达,早开展救助工作,节约救助成本,提高救助成效。
然而,对于运动中的遇险单元的位置是不断变化的,救助现场将随之变化,“就近”选派救助单元的工作将不再是简单的距离量取。救助现场的位置不仅受遇险单元运动方向速度的影响,同时也救助单元的方向速度的影响,这样就成为运动拦截问题。
而“就快”原则,不仅仅指救助单元的速度快,更是指最短时间到救助现场的能力,以及可协助遇险单元尽快脱险的能力。
1.2 遇险单元的运动状态
当沉没、触礁等遇险单元位置不变或变化很小的救助中,航行海面比较开阔,可以直接量取救助单元和遇险单元之间的距离,求得救助单元到达救助现场的预计时间和航向。
然而,对于运动的遇险单元,将需救助单元对其进行海上拦截,因救助现场是随着遇险单元和救助单元的航向速度而变化的,救助单元前往救助现场的航向将影响到达救助现场的时间,从而影响救助成效。海上救助中,拦截程序可用于救助船舶,也可以用于救助飞机,而速度较快的救助飞机更需要迅速地计算出拦截航向、拦截时间。海上拦截也适用于海上执法、打击海盗等情况。
2 对于运动的遇险单元的拦截方式及绘图推算
拦截方式分为对遇拦截、超越拦截和交叉拦截[2]。对遇拦截和超越拦截是小概率情况,交叉拦截是实际使用中最主要的方式。工作中,海上拦截问题采用海图绘图方式推算,就是根据已知的救助单元与遇险单元的两点位置,以及遇险单元的航向和航速、救助单元的速度,为在最短时间内拦截,通过海图上绘图方式,求得拦截时间、救助单元的拦截航向。海图绘图推算适用于两点之间经纬度跨度不大,同在一张墨卡托海图上,航行海面比较开阔,没有岛礁、渔区等需船舶变向变速的情况下。
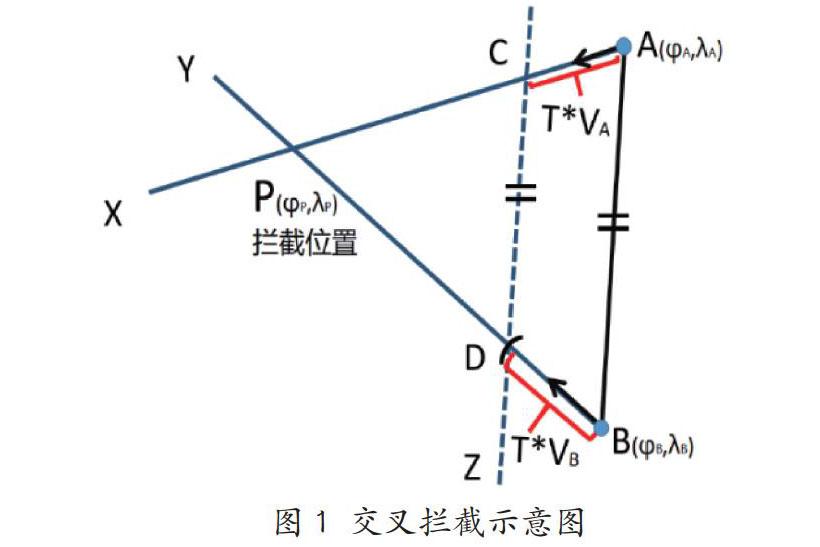
2.1 交叉拦截及绘图
交叉拦截:救助单元在遇险单元航线一侧,救助单元的速度满足交叉拦截遇险单元的要求。
交叉拦截(如图1所示)绘图推算如下:
在海图上标绘遇险单元A和拦截救助单元B的位置,过A和B两点连一直线AB,过A沿遇险单元航向画AX;取一固定时间T,VA为遇险单元A的速度,T*VA为T时间内遇险单元的航行长度,在AX上截取T*VA长度AC,过C作AB的平行线CZ;VB为拦载救助单元B的速度,T*VB为T时间内救助单元的航行长度,以T*VB为半径,B为圆心,画弧与CZ相交于D;连接BD及延长线BY,BY与AX相交于P,P点即是拦截点。
为确定拦截时间,可测量从A或B中任一点位置距拦截点间的距离,并用所选点的速度去除该距离,就可以确定拦截时间。
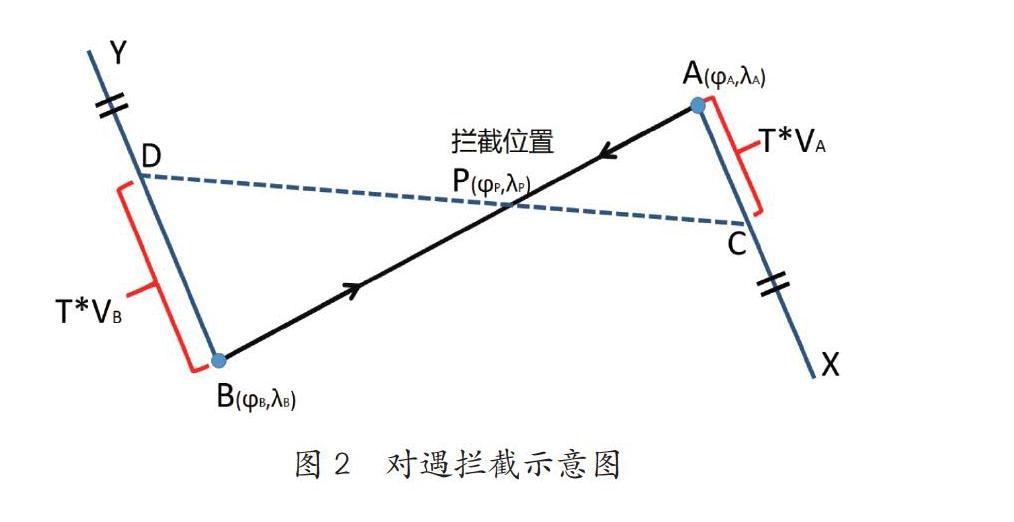
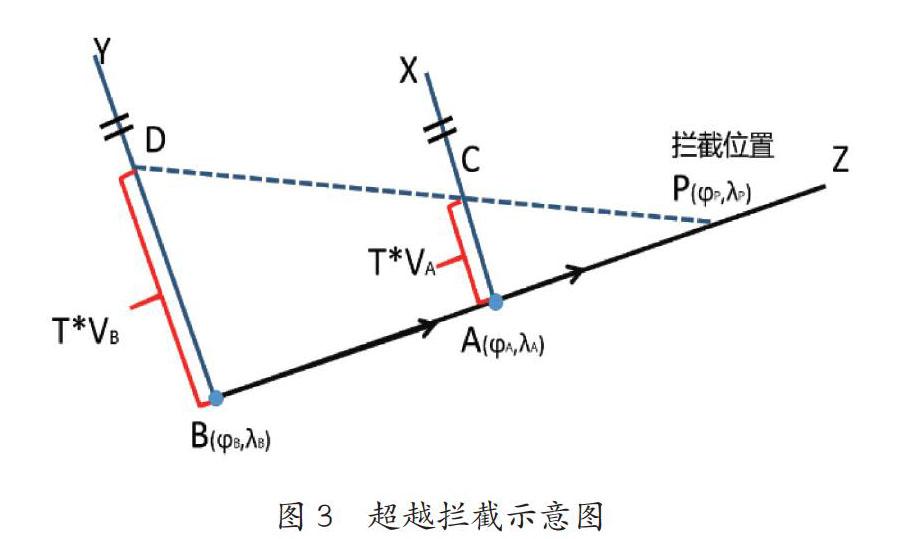
2.2 对遇拦截和超越拦截
对遇拦截(如图2所示):救助单元与遇险单元航向相反,航向正对对方。超越拦截(如图3所示):救助单元在遇险单元航向的正反方向上,航向相同,救助单元的速度应大于遇险单元的速度。绘图推算的方法类同交叉拦截,绘图推算如下图:
3 绘图推荐方法的局限性
采用绘图推算方法存在很多局限性。绘图推算是需要在海图上作图作业,存在一定的作图误差;绘图推算中需要海图定位、海图距离截取等过程,存在人为因素导致推算错误的可能;救助飞机机场不在海图上,或拦截过程跨度大、航程长时救助单元与遇险单元不在同一张海图上,将无法绘图推算,然而使用小比例的海图进行绘图推算会大大影响推算精度。
在对多个救助单元调派任务时,需要分别对各个救助单元在多张海图上进行绘图推算和比较,作业繁琐、时间长,影响救助指挥的高效性。另外,绘图推算方法不易被计算机引用,不易于智能化。
如果可以数学计算方法解决海上拦截问题,通过数学计算方式对救助单元的拦截能力进行评估,并对多个救助单元的拦截能力进行比较,将有利于救助指挥智能化的实现。
4 交叉拦截计算方法推导
拦截方式分为对遇拦截、超越拦截和交叉拦截。对遇拦截和超越拦截是小概率情况,交叉拦截是实际使用中最主要的方式,所以,首先对交叉拦截的情况进行推导。
根据交叉拦截绘图推算的知识,可知拦截计算的过程为:已知的救助单元、遇险单元的两点位置,以及遇险单元的航向和航速、救助单元的最大速度,求以最短时间进行拦截所用的拦截时间、救助单元的拦截航向。
4.1 航迹计算
对交叉拦截进行数学计算方法推导,将涉及航迹计算知识。
设起始点和到达点之间的纬差Dφ、经差Dλ、东西距Dep、恒向线航程S、恒向线航向C,由《航海学》知识,可知[3]:
纬差Dφ=S*cosC(n mile)
东西距Dep=S*sinC(nmile)
即两点间的纬差等于航程乘以航向的余弦,东西距等于航程乘以航向的正弦,而航迹计算中需要的是经差。求经差有三种方法:中分纬度算法、墨卡托算法、约定纬度算法。
中分纬度算法仅适用于赤道一侧的低、中纬度海区且航程不长时;约定纬度算法用于在赤道一侧的航行,航程长和高纬度上可以使用;墨卡托算法是精确的航迹计算法,除在等纬圈上航行外,其他任何场合都可以使用。这三种方法虽为航迹推算而推导出来的,但也适用于已知两点经纬度反求恒向线航向和航程。在不在等纬圈上的航程和航向,可通过采用墨卡托算法计算航程和航向;若出现等纬圈上的航程和航向计算时,采用约定纬度算法计算。在拦截任务中,遇险单元与救助单元在等纬圈上为小概率情况,下面主要以墨卡托算法进行推导。
墨卡托算法公式:
经差Dλ=DMP*tanC(′)
其中DMP为起航点与到达点之间的纬度渐长率差,即DMP=MP(φ2 )-MP(φ1)。
根据《航海学》的知识,可知墨卡托海图的纬度渐长率公式为:
公式中:e为地球当作“克拉索夫斯基”椭圆体的偏心率[6],e=0.0818133340169315。
《航海表》中的纬度渐长率就是通过该数学计算方法得来的。在计算机运算软件excel中建立了纬度渐长率自动计算,通过计算求得值与《航海表》中的值进行了比对。比对结果吻合,如图4所示。
4.2 交叉拦截计算推导
拦截计算的过程是:已知遇险单元的经纬度A(φA , λA),救助单元的经纬度B(φB , λB),遇险单元的速度VA、航向CA,救助单元的速度VB,求得救助单元的拦截航向CB,拦截位置P(φP , λP)以及到达拦截点时间TP。
4.2.1 交叉拦截时间计算推导
由航迹计算知识可知:经差Dλ=DMP * tanC(′),可得:,且纬差φB-φA>0时,CAB取值范围为(000°-090°,270°-360°);纬差φB-φA<0时,CAB取值范围为(090°-270°);因墨卡托算法不适用于等纬情况下的计算,且等纬拦截为小概率情况,若在等纬时,即纬差φB-φA=0,可以通过约定纬度方法计算,这里不再说明。由此方程可求得CAB,CAB是A到B的航向。
由公式:纬差,可求得SAB,SAB是A到B的长度,即AB=SAB。
因已知遇险单元A的航向CA,即是A到P的航向CAP,根据前面求得的A到B航向CAB,可求得角∠PAB。
A、B、P三点构成一个三角形,如图5所示。由正弦定理可知:在任意一个平面三角形中,各边和它所对角的正弦值的比相等。可知:,且BP=VB * TP,AP=VA * TP。所以
,可得:
可求得∠PBA,当VB小于VA* sin∠PAB,该公式无解,说明救助单元B的速度不能满足拦截遇险单元A,即救助单元没有拦截遇险单元的能力。
已知∠PAB, ∠PBA,根据三角形内角的和为180°,可得:
∠APB=π-∠PAB-∠PBA
当∠PAB大于等于90°时,由三角形中大角对长边的原理,可知BP长度大于AP长度,即VB应大于VA。
当∠PAB大于等于90°且救助单元B的速度VB小于遇险单元A的速度VA时,救助单元没有拦截遇险单元的能力。
由正弦定理可以:
即:
且AB=SAB,可求得拦截时间TP。
4.2.2 交叉拦截航向计算推导
已知遇险单元的速度VA、航向CA,CA即是A到P的航向CAP,救助单元的速度VB。由4.2.1推导可知∠PAB, ∠PBA,∠APB,AB,CAB,TP。虽然已经求得∠PAB,∠PBA,∠APB,通过作图辅助和三角知识可求得救助单元的拦截航向CBP,但不方便excel等运算软件自动计算。所以,通过矢量知识对拦截航向CBP进行计算。由矢量知识可知:
,
,
。
即,
,
,。
可知:,,。sinCBP,cosCBP分别求得CBP在000°到360°均有两个值。然而同时满足,,仅有一个值。这樣可方便excel等运算软件对其正弦余弦的两个公式分别求值,通过统计出现次数而得出CBP。
5 除交叉拦截外其他情况的计算方法
5.1 对遇拦截和超越拦截的计算方法
对于对遇拦截和超越拦截的情况,当救助单元和遇险单元不在等纬圈上时,可通过墨卡托算法求得救助单元和遇险单元之间距离;若救助单元和遇险单元在等纬圈上时,可通过约定纬度法求得救助单元和遇险单元之间距离。对遇拦截中,救助单元和遇险单元的相对速度即是两者速度和;超越拦截中,救助单元和遇险单元的相对速度即是救助单元与遇险单元的速度差。拦截时间等于救助单元和遇险单元的距离除以相对速度。对遇拦截中救助单元的航向为遇险单元航向相向,交叉拦截中救助单元的航向与遇险单元航向同向。
5.2 遇险单元位置不变的情况
当沉没、触礁、锚泊等遇险单元位置不变或变化很小的救助中,可以根据救助单元和遇险单元的等纬或不等纬,分别通过约定纬度算法或墨卡托算法求得救助单元与遇险单元之间距离以及救助单元到遇险单元的航向,救助单元到达现场时间等于距离除以速度。
6 思 考
在对于运动遇险单元的拦截问题中,数学计算方法(如图6所示)比绘图推算方法有很多优点。绘图推算中,救助单元与遇险单元不在同一张海图,或拦截跨度大,或海图图幅选区等问题导致绘图作业困难,而数学计算方法不受其影响;绘图推算方法不易通过计算机运算求得,需要人员画图作业,存在作图误差,而数学计算方法仅需输入遇险船舶位置和航向、救助单元最大速度,通过运算软件自动运算快速求得,计算过程将不受人为因素导致错误,且不存在作图误差,结果比绘图推算的结果精度高。
对于多个备选的救助单元时,可以通过数学计算方法快速求得各自的预计到达救助现场的时间和拦截航向,高效性远远大于绘图推算。可对多个救助单元的到达救助现场的能力进行评估,是否满足拦截的速度要求,拦截时间预计多长时间,为救助单元选派提供参考。
实际中,可能因航行海面不够宽阔,海况气象影响,或船舶避让、岛礁、碍航物、渔区等需要变速变向,这时,数学计算方法使用也是有意义的。可根据实际,满足使用时进行计算,结合航海资料信息进行综合性地评估。例如:有一艘在长江口灯船东航行中的遇险单元需要救助,对上海港外高桥的救助单元对该遇险单元实施救助进行能力评估时,可分段评估。救助单元需要通过长江航道航行出港,在航道中的航线是确定的,航程也可以确定,可预算救助单元到达长江口灯船的时间。到达长江口灯船后,长江口以东水域海面开阔,此时在进行计算方法确定到达现场的时间及开阔海面上救助单元的拦截航向。即使遇险单元航向航速发生变化,通过更新遇险单元航向航速,重新计算的数据仍然可为前往现场的救助单元给予变向参考。
基于“就近、就快”调派原则,通过计算对海域内所有可用的救助单元给予数据化的能力评估及比对,将可为救助指挥提供数据辅助。
参考文献
[1] 韦涛,薛忠林.可视化海上救助指挥系统建设的思考[J]. 航海,2020(3).
[2] 海軍司令部航海保证部.国际航空和海上搜寻救助手册[S].2013.
[3] 郭禹主编.航海学[M].大连:大连海事大学出版社,2005.8.
作者简介:
张亮,二副,(E-mail)xrg49@163.com,15388553326