
全自动水陆两栖服务机器人平台*
2021-08-23 02:35:58吴英健张京玲林柏诚候飞龙
科技创新与应用 2021年22期
吴英健,欧 涛,张京玲,林柏诚,候飞龙
(五邑大学 智能制造学部,广东 江门529020)
“十一五”期间,国家已经把“废墟搜索与辅助救援机器人”列入国家863项目,由此可见救援机器人的重要性。全自动水陆两栖服务机器人具有很强的环境适应能力,有广泛的作业范围,方便投放与回收,可在人类无法完成作业的地形,安全快捷检测水质[1-2],例如陆地、湖泊、河流、沼泽和海洋等,既可以应用于河道水质检测,也可以应用于淡水养殖和紧急的救援活动等。
本论文设计了全自动水陆两栖服务机器人平台,可以实现河道水质全自动检测,淡水养殖全自动管理和全自动紧急救援等功能。用户还可以通过电脑端或者手机端直接控制水陆两栖服务机器人完成作业。
1 平台总体设计
全自动水陆两栖服务机器人平台由水陆两栖机械结构、环境建模子系统(包括环境建模主控器、通信系统、定位导航避障系统、摄像头)、工控子系统、中央控制平台和多种配件装置等部分组成。
中央控制平台获取用户各种任务指令,系统对每个任务划分优先级,通过A*算法[3]生成一条大致路径,之后再通过布谷鸟优化算法[4]生成一条优化路径,通信系统自动控制水陆两栖服务机器人完成相应任务。水陆两栖服务机器人利用定位模块和避障模块实时获取自身位置和周边障碍物情况,采用履带和螺旋桨两种动力传输,完成水陆混杂任务。同时,还可通过摄像头在电脑和手机端进行远程实时遥控。平台上设定导轨和卡口,可以根据不同应用场景的不同任务需求,灵活搭建多种配件装置。
平台电控部分由环境建模主控器、WiFi通信模块、定位模块、避障模块、摄像头模块、工控控制器、电机驱动模块、各配置功能控制模块和电源模块等组成。水陆两栖服务机器人电控框图如图1所示。
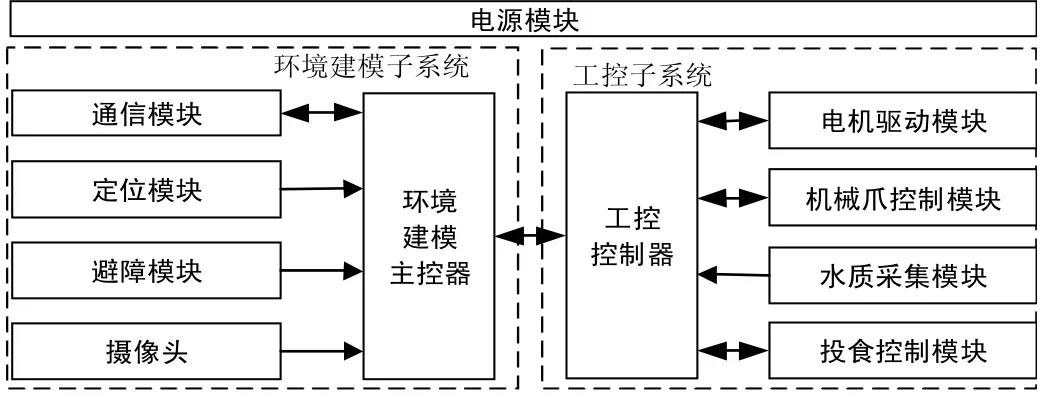
图1 全自动水陆两栖服务机器人电控框图
2 多传感器融合导航系统设计
定位模块采用基于TDOA算法UWB定位技术与低成本GPS组合定位的水上机器人位置定位方法提供高精度定位[5]。导航避障模块采用毫米波雷达传送目标信息,激光雷达传送360°距离信息,风向传感器传送风速及角度,定位系统传送水陆两栖服务机器人位置信息。环境建模主控制器处理这些信息判定自身与目标体的相对位置并得出相应指令控制机器人。多传感器融合的导航系统框图如图2所示。
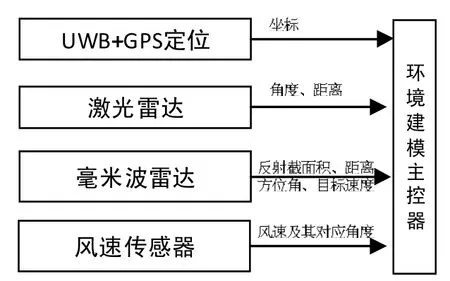
图2 多传感器融合的导航系统框图
2.1 UWB与GPS组合高精度定位
使用基于TDOA算法的UWB定位技术与低成本GPS组合定位方法。不仅能够节省技术成本而且能够大幅度提高定位精度。
基于TDOA的UWB定位技术测量出来的水陆两栖服务机器人的实时位移观测方程和GPS定位技术的伪距观测方程得到位置补偿方程。然后,位置补偿方程与GPS的伪距观测方程使用扩展卡尔曼滤波算法进行数据融合,最后得到具有实时性和方向性的精确水上定位坐标。
2.2 基于人工势场法的自主避障算法
首先根据当前姿态信息、环境感知信息以及路径规划信息生成当前坐标信息,当水陆两栖服务机器人前方检测存在障碍物且周边没有障碍物时,进一步判断朝向是否与当前目的地连接线段相接近以及当前坐标与当前目标坐标在某一坐标是否接近后,把当前坐标修改为接近的坐标;当水陆两栖服务机器人前方检测存在障碍物且周边有障碍物时,按照人工势场法的原则如公式(1)-(3)所示令水陆两栖服务机器人与障碍物产生斥力,将当前位置坐标与障碍物边缘的坐标形成水陆两栖服务机器人偏转角度并生成新的目标点实现避障。避障流程图如图3所示。
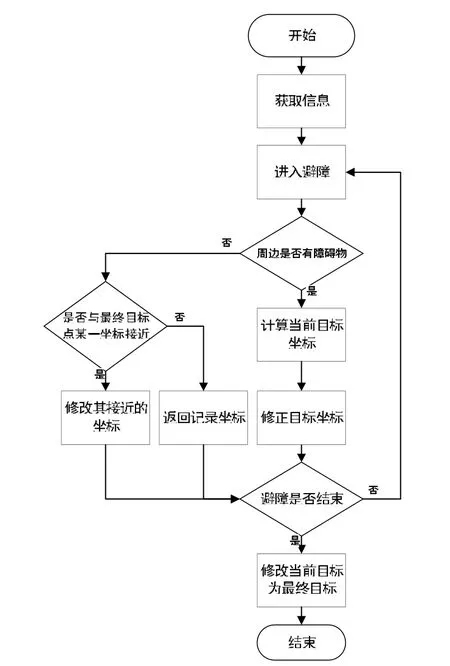
图3 避障流程图

3 基于分段式双闭环PID的电机控制
水陆两栖服务机器人在接收到工控机下达的目标坐标指令之后会启动电机推动水陆两栖服务机器人向目标航向航行。
水面航行器容易受到惯性的影响而难以控制,因此一般的PID在水面航行会出现很难达到预想效果,所以增加对速度V与角速度AV变量来对惯性进行调节。通过传感器获取的航向角度作为闭环的外环,实现航向角度的闭环控制。根据电机转速大小分为低速、中速、高速三个档次,通过给三个档次分别设置三个特定的PID控制器,以此来克服无刷直流电机在越高转速的情况下越难达到使水陆两栖服务机器人航行稳定的缺点。通过将两栖机器人的速度作为闭环的内环来实现其速度控制。在双闭环PID控制器的控制下对PWM输出进行调节,最终实现对航向姿态的稳定调整。双闭环PID控制系统如图4所示。如公式(4)所示,u(t)为控制器的输出量,e(t)为控制输入量,即给定量与输出量的偏差,水陆两栖服务机器人通过PID控制器计算得:
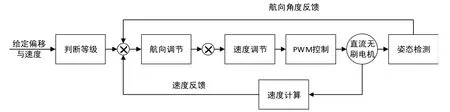
图4 双闭环PID电机控制系统

4 多任务路径规划算法
首先,在地图上放置多边形的可行区域,规定机器人平台的活动范围,然后在软件界面放置任务类型、紧急程度和坐标,利用A*算法,把设备设置为起点和父类,各个任务坐标点为终点,计算得到当前设备坐标与各个目标点的G的总值和设备到达各个目标点的路径,记录为一个各任务点间的距离矩阵[6]。用布谷鸟优化算法对路径进行优化,寻找时间成本最低的最短路径。其中,用轮盘赌的方式产生一个较优的初始化解,大幅度降低迭代次数,减少算法优化的时间成本。而优化过程使用自适应算子,让算法能快速收敛,能在短时间内得到最优解。采取以下方法准则对路径节点进行优化:
(1)删除节点准则。
(2)新增节点准则。即进行弗洛伊德平滑优化,得到一条平滑的路径。路径规划算法流程图如图5所示。
5 结论
该系统平台定位误差在10cm以内,避障最大距离为50m,最大航速2.5m/s,可以较好完成水陆混杂的自动巡航任务;能够搭建多种配件装置,例如机械臂装置、水质检测装置等用于洪水紧急救援、精细养殖以及改良河道等应用场景。
猜你喜欢
国画家(2021年4期)2021-10-13 07:32:06
快乐语文(2021年15期)2021-06-15 10:19:38
童话世界(2020年13期)2020-06-15 11:54:32
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
故事大王(2019年4期)2019-05-14 16:38:48
城市轨道交通(2019年2期)2019-04-04 08:55:54
青少年科技博览(中学版)(2017年1期)2017-03-02 06:19:16
现代企业(2015年6期)2015-02-28 18:51:56
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
