
基于无人机的大气污染源溯源可视化系统设计与实现
2021-08-20 15:28刘奎
机电信息 2021年20期
刘奎

摘要:当前,规模化的工业园区越来越多地出现,园区企业的废气排放不仅是重要的空气污染源,也是影响本地空气质量考核、引起居民投诉信访量上升等的最重要因素。园区大气污染物中的细颗粒物、挥发性有机物、硫氧化物和氮氧化物等对于人体健康有着极大的危害,会直接或间接导致当地空气质量检测数据上升。而面对突发性的投诉和阶段性检测数据上升时,由于园区内的排放源很多,排放物随着大气流动,管理者常常因不能确定大气污染物准确来源而无法实施针对性管理。鉴于此,利用无人机高空俯瞰的视角、超大的监控范围、快速的响应能力,设计和实现了大气污染源溯源可视化系统,将传统的只能地面作业的大气污染检测扩展到了立体空间。
关键词:可视化;污染源;大气;溯源;无人机
0 引言
近年来,无人机的应用越来越广,在环保领域的应用也越来越多,特别是在大气环境检测中的应用更为广泛。无人机具有高空俯瞰的视角、超大的监控范围、快速的响应能力,因而得以将传统的只能地面作业的大气污染检测扩展到立体空间,这就为基于无人机实现污染源快速溯源提供了技术保障,为大气污染源溯源可视化系统的设计和实现奠定了基础。
1 系统设计
1.1 系统框架
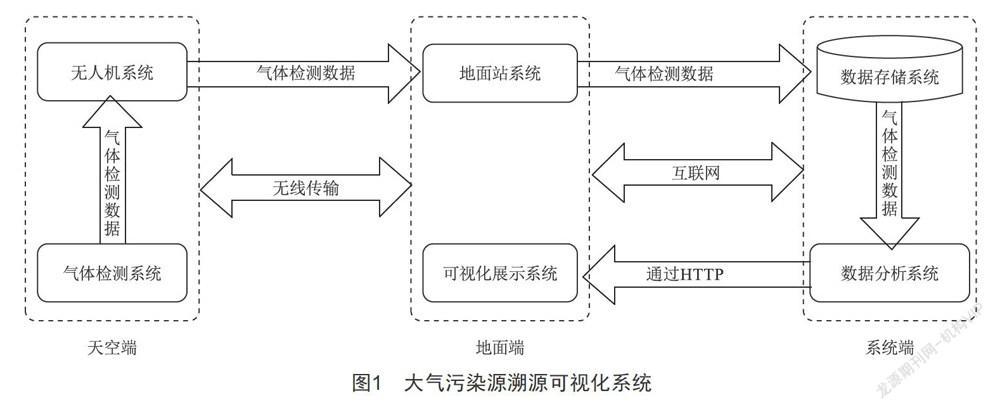
如图1所示,基于无人机的大气污染源溯源可视化系统可分为三大部分:天空端、地面端和系统端。
天空端由气体检测仪系统和无人机系统组成,地面端由地面站系统和可视化展示系统组成,系统端由数据存储系统和数据分析系统组成。气体检测系统将传感器获取的气体浓度数据通过无人机系统的无线传输系统传输到地面站系统,地面站系统将数据通过4G/5G网络传输到系统端的数据存储系统,数據分析系统通过对数据进行分析,将分析结果以Web方式进行展示。
1.2 功能模块
根据实际需要,整个系统可分成多个子系统,具体包括无人机系统、气体检测系统、无线通信系统、地面站系统、数据存储系统、数据分析系统和可视化展示系统,各个子系统有相应的子模块,如图2所示。
下面对各个模块的功能进行简要说明:
(1)气体检测系统:气体检测系统可以同时安装6组气体检测模块,一次进行多种气体的检测,通过不同的组合适用不同的应用场景,在不同场景下进行污染源追溯。比如在大气环境中同时检测PM2.5、PM10、SO2、CO、NO2、O3和VOCs,通过配置6组高精密传感器同时检测多种气体浓度。
(2)无人机系统:无人机系统作为气体检测的搭载平台,携带气体检测系统完成立体空间的气体检测工作,整个系统由锂电池供电提供动力,通过GNSS系统完成系统定位,通过飞控系统完成无人机的自主飞行,通过数据链路系统将无人机数据和气体检测数据传输到地面站系统。
(3)无线通信系统:无线通信系统把天空端、地面端和系统端连接起来,形成一个完整的系统。通过数传系统无人机把天空端的无人机数据、气象数据和气体检测数据传输到地面站系统,地面站系统把航线数据传输到无人机系统;4G/5G网络将地面站接收到的数据传输到数据存储系统。
(4)地面站系统:地面站系统能实时查看无人机的飞行姿态信息、位置信息、气象信息和气体检测数据信息,同时可以规划无人机的飞行航线,控制无人机根据飞行航线自主飞行。
(5)数据存储系统:数据存储系统由数据解析和数据库组成,实时解析地面站发送的数据信息,并存储解析后的无人机数据、气象数据、气体检测的浓度数据和用户数据,通过设备SN号和用户UID号对数据进行关联。
(6)数据分析系统:数据分析系统基于无人机的GNSS定位数据、速度、方向,气象数据中的风速、风向,气体检测仪的气体浓度值,通过高斯扩散模型,结合传感器特性和无人机飞行数据,分析出空间点污染物浓度值。
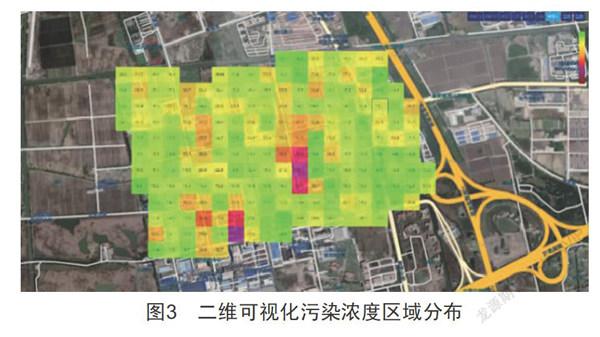
(7)可视化展示系统:可视化展示系统利用无人机的GNSS定位信息,将污染物浓度分布图在GIS系统上进行二维可视化展示和三维可视化展示,并定位出污染源。
2 大气污染扩散数据修正
使用无人机搭载气体检测传感器对气体浓度值进行检测的过程中会受到诸多因素影响,污染源和污染物的类型、气象条件和地理环境特征在污染物的扩散中都起着重要作用;无人机的飞行速度和传感器检测的响应时间则影响着检测点位置的准确获取。因此,需要对无人机获取到的气体浓度数据和位置数据进行修正,以减小污染源定位的误差。
2.1 位置修正公式
无人机是在飞行过程中通过气体传感器检测气体浓度数据,传感器从接触当前气体到检查出数值有一个时间,这就造成检测数值和实际浓度值位置点存在偏差,因此需要通过下列公式对位置偏差进行修正:
X=X′-(HS×t90)sin α (1)
Y=Y′-(HS×t90)cos α (2)
式中:X为实际浓度值位置X坐标点;Y为实际浓度值位置Y坐标点;X′为无人机系统反馈的浓度位置X坐标点;Y′为无人机系统反馈的浓度位置Y坐标点;HS为无人机飞行的水平速度;t90为气体传感器检测时间;α为无人机飞行的方向角。
2.2 高斯扩散模型
在均匀、定常的湍流大气中污染物浓度满足正态分布,由此可导出高斯型扩散公式。因为高斯模型是一类简单实用的大气扩散模型,所以在大气环境影响评估的实际工作中,大气扩散计算通常以高斯大气扩散模型为主。
猜你喜欢
中国信息化(2022年6期)2022-07-18
东方教育(2016年7期)2017-01-17
物联网技术(2016年11期)2017-01-12
北方文学·下旬(2016年9期)2016-12-20
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
新闻世界(2016年7期)2016-08-23
卷宗(2011年9期)2011-05-14
新华月报·下(2008年3期)2008-03-24
