果园精准施药技术的现状与发展趋势分析
2021-08-20 04:11姜业元曹佃龙徐晓雪
南方农机 2021年15期
姜业元,曹佃龙,高 磊,徐晓雪,赵 静
(山东理工大学农业工程与食品科学学院,山东 淄博 255000)
果园常年多次喷施农药对施药机械作业水平要求较高,而我国应用于果园施药的装备相对落后,很多地区仍然使用低端喷雾机械。当前,对果园采取的施药措施是以果园作物每一处的病、虫、草害为条件,喷洒一致的药量,无法精准施药。果园精准施药是根据果树病、虫、草害情况进行针对性的农药喷施,可减少药物浪费,提高利用率,降低农药残留量,削弱因农药过度使用带来的环境问题,提高果实品质,提高果树产量。
1 果园精准施药技术的现状
1.1 国外果园精准施药技术的现状
果园进行雾化施药过程中,雾滴的飘移和沉降损失是影响施药效果的重要因素之一,尤其是在周围环境风力较大的情况下,因飘移造成的农药浪费可达施药量的70%~80%[1]。针对这一问题,国外普遍采用防飘喷头来防止雾状药液飘移。该喷头可喷出较大的雾滴,这样可以增加每一喷出雾滴的重量,较大地降低喷药损失。另外一种解决方式是在喷雾器的喷杆部位安装防风屏,防风屏有气力式和机械式两种,可辅助阻挡雾滴飘移和沉降,试验表明,使用防风屏可以有效降低因作业时周围环境的风力带来的飘移影响,能使常规喷杆的飘移和沉降减少65%~81%[2]。
近年来,随着科技的发展,一种新型的精准施药技术被研发出来,该技术主要利用静电喷雾以达到精准施药的目的。在喷头与果树待施药部位之间利用高压静电形成一个静电场,同时,农药液体在喷头和高压静电的作用下转化为带有电荷的雾滴,由于静电场力的作用,带有电荷的雾滴做定向运动,达到对果树精准施药的目的,并使雾滴附着效果更加显著,同样可以很大程度上减小雾滴飘移的可能。利用静电来实现药液雾化的工作原理是:静电作用可以降低液体表面张力,减小雾化阻力,同时,同性电荷间的排斥作用产生与表面张力相反的附加内外压力差,从而提高雾化程度,大大降低农药对环境的污染[3]。其中,Bertellirandell公司生产的静电喷头可用在喷杆式喷雾机和背负式喷雾喷粉机上,该喷头可以使喷雾损失较常规喷雾技术减少65%以上[4]。
1.2 国内果园精准施药的现状
目前我国农业的发展现状正处于粗放农业和智慧农业转变的关键时期,在智慧化农业的发展过程中,如何实现农业的智能化和生态化成为农业进一步革新的核心问题之一。我国传统喷药主要采用效率比较低的背负式手动喷雾器,背负式手动喷雾器现场作业如图1所示。虽然利用手动操作规程简单,但需要人力背负沉重的药箱,劳动强度较高,而且在进行施药时通过手动控制机械精准抵达果树待施药部位的药量只有喷洒总药量的15%~20%,剩余绝大多数的农药散失至四周环境当中,不仅会造成农药浪费和环境污染的负面影响,而且不可避免地会使部分农药停留在果实表面,往往得不到及时合理的处理,从而导致施药效果大大下降。

图1 背负式手动喷雾器现场作业
为了解决手动式喷雾机械存在的问题,我国大力发展智能化作业,研究出诸多新型的果园精准施药技术。其中,风送式喷雾机可以在高强度风力的作用下进一步雾化,并利用离心风机送达至所需施药的部位,该方法不仅可以有效穿透树叶层,而且施药高效,在果园施药等领域得到了大力推广。李超等[5]依据现在国内大小型葡萄园的生长现状,研究设计了一种立管风送式喷雾机,立管风送式喷雾机三维装配图如图2所示,并测试了喷雾机施药成效和农药飘散防治好坏的性能,测试表明该喷雾机喷出的药液具有较高的附着能力,可减少农药因飘移造成的损失量[6]。

图2 立管风送式喷雾机三维装配图
徐莎等[7]针对传统喷雾器对于不同高度果树的施药现状,研究了牵引式果园风送喷雾机,工作原理如图3所示。该喷雾机包括离心风机和导流风箱,导流箱的角度可以进行调节,并且离心风机有相反的转向。在进行果园喷药时,通过调节导流箱的角度,以便于调节喷头高度,适合对不同高度的果树进行喷雾作业,相反转向的离心风机则进一步保障了喷雾效果的稳定性,提高喷雾效率。
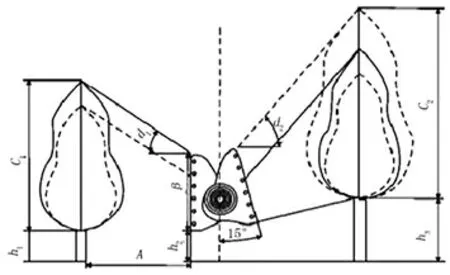
图3 牵引式果园风送喷雾机的工作原理
以上两种风送式喷雾机主要针对果园施药设计,但是诸如此类的果园喷雾机有一个缺点:即在一个作业周期内不会停止喷洒农药,即使在果树的空隙之间也不暂停作业,并且在自然风的作用下有一定量被雾化的药液易飘失,仍会有50%左右的农药由于没有作用在果树相应位置而造成不必要浪费。解决果园连续喷药时农药有效利用率低的有效方法之一是实现对靶施药,利用自动化技术与喷雾技术进行互补作业,靶标探测“电子眼”发现靶标(果树枝叶)时,喷雾机自动控制系统打开喷雾系统进行对靶喷雾,在没有果树枝叶的空当,“电子眼”把信号传给自动控制系统,将喷雾系统关闭,喷雾机不对外喷雾施药,该项技术至少可节省农药50%以上[8]。由于果园自动对靶静电喷雾机实现自动对靶喷雾是基于红外传感探测技术,具有高灵敏度和高诊断效率的优势,可以从一定程度上提高农药的使用程度,从而降低施药后的农药残留,提高果实质量。果园自动对靶静电喷雾机的系统体系结构和组成如图4所示。

图4 果园自动对靶静电喷雾机的系统体系结构和组成
2 果园精准施药存在的问题
2.1 风送式施药难以实现靶向施药,造成污染和浪费问题
我国现代农业果园大多采用风送施药机等较为传统的植保方式,主要采用人工管理和手动控制技术,人力依赖程度和劳动强度高。传统的作业方式虽然在一定程度上提高了工作效率,改善了农药的利用率和喷洒农药的均匀性,但没有关注到植株对药量的差异化需求,造成了植保效果不足和药物浪费等问题。近年来,随着精准农业概念的提出和电子信息技术的进步,国内外的无人机遥感分析技术逐渐得到重视,美国等国家在21世纪初已广泛将RS、GIS、GPS等技术应用于航空施药领域。
2.2 当前植保无人机仍有不足,发展普及受限
果树的产量和质量很大程度上取决于前期对果树进行的病虫害管理。目前,果园精准施药应用较为普遍的植保机械如植保无人机,虽然有更高的施药效率,但现阶段仍存在载重小、限制用药、喷散效果有限等缺点。同时,植保无人机需要有专业人员进行操作和维修,盲目操作或拆卸容易影响植保机械的正常使用,并且植保无人机类型众多,各具针对性,若盲目购买难以发挥其工作效能,会给果农带来许多不便,影响植保无人机在果园精准施药领域进一步的普及和应用。
2.3 果园精准施药技术大多处于理论研究阶段,得不到实际应用
到目前为止,许多来自实验室的研究无法在现实环境中得到试验,导致缺少试验参考数据,影响研究人员对设备进一步改进。另外,部分果园精准施药技术尽管也取得了一定成就,但仅仅局限在理论阶段,真正应用到果园实际生产中的技术较少。如静电喷雾技术,虽然很早就在该领域展开研究,理论也得以证明,然而在实际的果园施药技术中却很少被应用,表明我国在果园精准施药领域理论和实践仍存在差距,很大程度上制约了果园精准施药技术的发展。
3 果园精准施药技术的发展趋势
相对来说,地面植保机在果树精准施药方面占有较大的优势,有很大的发展空间[9]。目前基于多光谱相机的作物模型逐渐成熟,通过人工智能算法对作物病虫害识别也更加精准,已经出现很多可遥控或者可编辑路径的地面植保机械,其中ROS系统、SLAM和GNSS的发展与应用也为地面果园的精准管理提供了可能,从而实现果园机械设备的不断智能化。此外,果园精准施药技术的提高应适当注意结合智慧农机与农艺。我国果园地理差异大,种植模式不同,因而果园的株距、行距、密度等千差万别。现存的一些果园精准施药技术不能够完全与现在的种植模式相适应,限制了机械的作业效果和潜力。随着智能化、信息化的兴起,虽然国内外出现不少类型的操作系统,但是没有统一的标准,接口互换性较差,为了实现稳定操作和提高接口的互换性,要尽快搭建一个公开、开放的统一操作系统平台,从而在我国建立一个成熟稳定与安全的移动端操作平台,为果园精准施药技术实现平台保障。为了进一步开发果园施药机械的作业潜能,提高精准施药效果,相关部门要建立标准化种植模式,为实现农业智慧、智能和绿色的发展奠定基础。通过应用物联网等相关现代信息技术实现果树自动识别、自动定位、自动配药、精准施药等一系列无人操作,从而推进精细、高效、绿色和智慧农业的发展,逐步建成资源节约型和环境美好型的果园管理模式。
4 结语
果园精准施药技术的发展顺应了“十四五”的“实现巩固拓展脱贫攻坚成果同乡村振兴有效衔接”的目标,是中国果园产业实现现代化的基础之一。近年来,政府加大对果园产业的补助保障力度,以及各高校和研究所对果园精准施药技术的不断研究,果园精准施药技术必然会迎来高速发展的阶段,使我国果园产业朝着绿色、经济、智能的方向发展。
猜你喜欢
小哥白尼(趣味科学)(2022年2期)2022-05-25
今日农业(2021年17期)2021-11-26
天津农林科技(2021年2期)2021-04-16
孩子(2020年11期)2020-11-17
中国品牌(2020年4期)2020-11-16
今日农业(2020年18期)2020-10-27
落叶果树(2020年5期)2020-10-22
农机使用与维修(2018年3期)2018-03-23
大陆桥视野·下(2017年6期)2017-09-05
江苏农业科学(2016年1期)2017-05-17