一种基于介电弹性体驱动的软体机器人设计方法
2021-08-19 08:22闫茜茜何田
青岛大学学报(工程技术版) 2021年3期
关键词:设计
闫茜茜 何田

摘要: 针对某些极端环境下不利于人工操作的工程探测问题,本文通过对软体机器人材料、结构、制造方法以及步态控制4个方面进行研究,提出了一种新型4足爬行软体机器人的设计方法。机器人身体是由硅酮介电弹性体(dielectric elastomer,DE)薄膜和单壁碳纳米管薄膜组成的一种柔软结构,为降低软体机器人驱动电压,限制了DE和单壁碳纳米管薄膜的层厚。同时,为增大输出力,采用DE叠层结构,以支撑机器人身体的质量。研究结果表明,该软体机器人长为106 mm,由6个堆叠式介电弹性体驱动器(dielectric elastomer actuator,DEA)驱动,具有驱动电压较低、响应速度快、结构紧凑且输出力及位移较大等特点。该研究为后续模型的制作及機器人的应用奠定了基础。
关键词: 介电弹性体; 软体机器人; 设计
中图分类号: TP242.3 文献标识码: A
收稿日期: 20210429; 修回日期: 20210603
基金项目: 国防科技创新特区基金资助项目(2019)
作者简介: 闫茜茜(1994),女,硕士研究生,主要研究方向为自主柔性智能体。
通信作者: 何田(1971),男,博士,讲师,主要研究方向为自主柔性智能体。 Email: het@qdu.edu.cn
传统的刚性机器人无法适应复杂多变的操作环境,所以柔软且可变形机器人逐渐成为研究热点[13]。随着材料科学的进步,科研人员通过模仿自然界的软体动物,开发了各种各样的软体机器人,如爬行机器人[4]、行走机器人[56]、昆虫机器人[7]和水下机器人[8]等。介电弹性体(dielectric elastomer,DE)是一类典型的智能软材料,其能量密度与动物肌肉非常接近,可应用于软体机器人。目前,国内外对基于DE驱动的软体机器人的研究越来越多。Li G等人[9]设计了仿生狮子鱼机器人,该机器人能在10 900 m深的马里亚纳海沟游动;M. Shintake等人[10]设计的质量只有1 g的介电弹性体驱动器(dielectric elastomer actuator,DEA),能提起质量60 g的鸡蛋;C. Christianson等人[11]使用液体作为电极的无框架DEA,能在水下进行伪装而不被周围的海洋生物发现。但对于能在极端环境下执行探测任务的陆地爬行机器人的研究非常有限,且大多数为实验室模型。基于此,本文提出了一种驱动电压较低、响应速度快、结构紧凑且输出力及位移较大的软体机器人设计方法。通过对软体机器人的材料、结构、制造方法以及步态控制4个方面进行研究,得到了可在极端环境下爬行的4足软体机器人。该机器人具有硅酮介电体及单壁碳纳米管柔性电极组合的堆叠式DEA结构和高度集成的电子控件。该研究为软体机器人模型制作奠定了基础,具有重要的指导意义和应用价值。
1 软体机器人的设计原理及方法
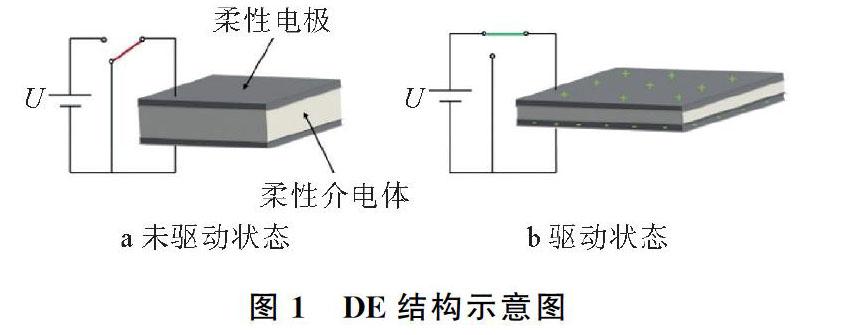
本文所设计的4足爬行软体机器人,长约10 cm,驱动频率为1~10 Hz,驱动电压控制在2 kV以下,且位移较大。该机器人由机身和4条腿组成。由于机身要负载集成电子控件,所以机身由2个DEA同时驱动,4条腿分别由1个DEA驱动,DEA是由DE堆叠而成。DE结构示意图[13]如图1所示。DE通常由2个柔性电极层及夹在电极层之间的柔性介电体组成,图1a表示未施加驱动电压时的状态,图1b表示施加驱动电压时的状态,DE在电场作用下,其内部的正、负电荷会在2个相对表面进行聚集,弹性体薄膜受麦克斯韦应力的驱使产生驱动应变,从而厚度减小,表面积增大[12]。
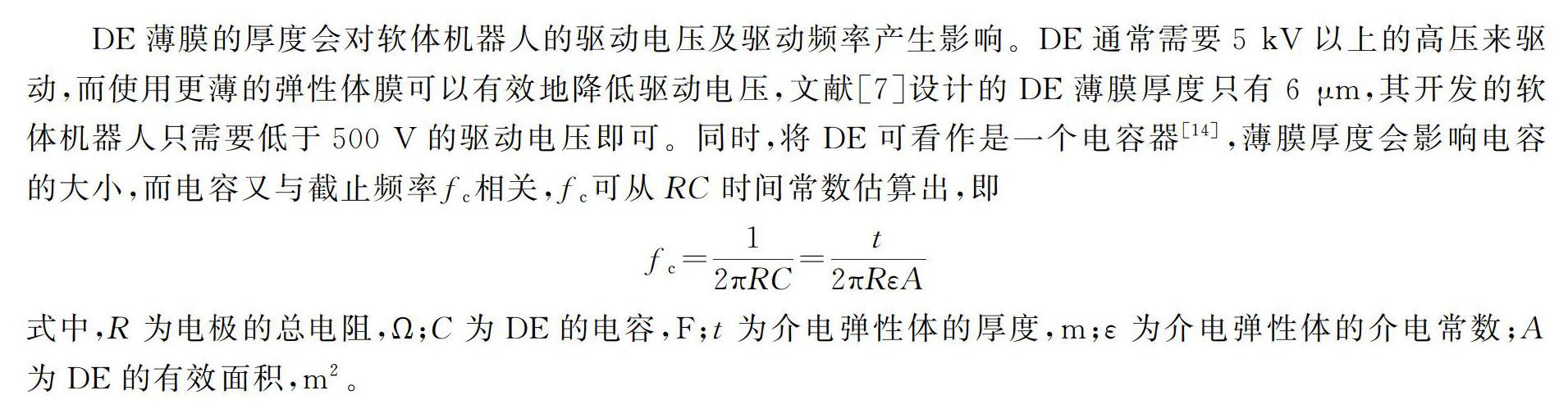
DE薄膜的厚度会对软体机器人的驱动电压及驱动频率产生影响。DE通常需要5 kV以上的高压来驱动,而使用更薄的弹性体膜可以有效地降低驱动电压,文献[7]设计的DE薄膜厚度只有6 μm,其开发的软体机器人只需要低于500 V的驱动电压即可。同时,将DE可看作是一个电容器[14],薄膜厚度会影响电容的大小,而电容又与截止频率fc相关,fc可从RC时间常数估算出,即
fc=12πRC=t2πRεA
式中,R为电极的总电阻,Ω;C为DE的电容,F;t为介电弹性体的厚度,m;ε为介电弹性体的介电常数;A为DE的有效面积,m2。
厚度低于100 nm的碳纳米管电极的电阻可以做到小于1 000 MΩ,为了满足驱动频率和驱动电压的要求,并根据前人经验,最终选定DE薄膜的厚度为50 μm[7,15]。结合机器人外形,设计DE薄膜的长度为30 mm,宽度有两个规格,一个是应用于腿部,规格为13 mm,另一个是应用于机身,规格为8 mm。
由于超薄的弹性体膜容易发生失效,导致整个驱动器无法工作,而叠层结构的应用可以很好的抑制失效的发生。文献[1516]开发了一种12层DEA的制造方法,并将这种方法应用于软体机器人设计,实验表明,该机器人具有较好的鲁棒性。同时,用于软体机器人的功率转换器,市售质量小于5 g,加上电池、通讯模块和控制模块,集成电子控件的总质量可控制在40 g以下。为使机器人能产生站立姿态,DEA的输出力应能克服整个机器人的质量,所以本实验采取5层叠层结构。
2 软体机器人设计
2.1 材料选择
用于软体机器人的介电体材料有丙烯酸酯、硅酮弹性体、聚氨酯和天然橡胶等。其中,丙烯酸酯能产生较大的变形,易与其他材料粘合,因此适合多层DE驱动器制作,但有很强的粘滞性,机电响应速度慢,且输出力较小。硅酮弹性体粘弹性较低,弹性模量大,机械重复性高,寿命长,其缺点是介电常数低,导致产生一定的应变,需要相对更高的驱动电压,也会造成其能量密度较低。
本文设计的软体机器人选用硅酮弹性体以满足快速响应、大形变和较高输出力的要求。另外,导电填充物硅酮基弹性体的掺入,使DE具有更高的机电转化率和稳定性[1718]。初始方案采用市售的单组分硅酮材料,或者是多组分硅酮复合材料。
应用广泛的柔性电极有碳基柔性电极,碳纳米管柔性电极,金属柔性电极,离子水凝胶电极等[19]。科研人员也在不断开发新的电极材料,以充分发挥软体机器人的应用潜力。柔性电极要求具有较低的模量,能随弹性体而形变,且在大形变条件下保持较好的导电性能。碳基柔性电极价格低廉、易于获取,目前应用最为广泛。碳纳米管电极柔顺性极高且无毒性,可以制造超薄的可拉伸电极,而在发生电击穿时,碳纳米管会在缺陷区域周围蒸发,在电极两侧产生隔离效果,因此驱动器仍然可以正常运行,所以又被称为“容错电极”。金属柔性电极导电性好,应用较多的是金、银等金属,为了满足柔性要求,应尽可能减小电极的厚度和宽度[20]。离子水凝胶电极具有低的弹性模量和透明性,可应用于对透射率要求高的软体机器人[21]。考虑到对电极厚度的要求,本文采用碳纳米管电极。而在各类碳纳米管材料中,单壁碳纳米管在结构上具有更高的均匀一致性和更少的缺陷,满足高电场强度的应用条件,所以本研究将采用市售单壁碳纳米管材料,通过简单的制备,获得所需的弹性体薄膜。
机器人基体材料将采用市售聚对苯二甲酸乙二醇酯(polyethylene terephthalate,PET)薄膜,该材料具有一定的弹性模量,柔顺性好,符合设计要求。另外,机器人的电源管理模块、通讯模块和控制模块等电子组件将全部集成在同一印刷电路板(printed circuit board,PCB)上。
2.2 结构设计
软体机器人结构示意图如图2所示。由图2a可以看出,机器人由6个DEA组成,长106 mm,DEA1、DEA2、DEA5和DEA6分别控制机器人的4条腿,DEA3和DEA4同时控制机器人的身体;图2b是对局部进行了放大,以展示结构细节。
2.3 薄膜制造
DE薄膜可通过注模、旋涂和3D打印等方法进行制备[22]。其中,3D打印技术又称增材制造技术,具有快速成型、可缩短结构原型设计周期和满足个性化要求等特点[3],与传统的成型技术相比具有一定优势,因此得到了广泛应用。但由于材料种类的改变和打印精度的提高,需要对打印喷嘴进行定制化。考虑加工的便捷性,本文选择涂膜或旋涂方法制备介电体薄膜。另外,柔性电极可以通过掩模、转印、溅射沉积等工艺,均匀地覆盖在薄膜两侧,本文采用LangmuirSchaefer方法,制备超薄单壁碳纳米管电极[7]。
软体机器人具体装配过程是首先将电极薄膜转移在PET薄膜上,同时对DE薄膜两侧进行表面活化处理(二苯甲酮溶液浸湿,再用氮气干燥),以增加电极与DE膜的层间附着力。将表面活化后的DE膜转移到电极表面,再重复进行电极和DE膜的转移,直至完成图2所示结构。为避免在较高驱动电压下发生电击穿、张力损失和力电失稳等失效形式,本文对DE薄膜进行一定比例的等双轴预拉伸,以增强机电稳定性。
2.4 运动步态设计
通过模仿4足爬行动物,并参考哈佛大学报告的气动爬行机器人[2324],设计软体机器人的步态,按照一定时序,对6个DEA分别进行控制。其步态周期为2步,每步包括如下4种状态:
1) 后腿和身体驱动,产生一个站立位置。
2) 后腿、身体以及在身体相对侧的前腿被同时驱动,将重心从后腿转移到前腿。
3) 对后腿释放,同时继续对前腿驱动,使机器人向前移动。
4) 对加压前腿进行短暂释放。
身体交替的两侧重复以上4种状态,形成4条腿交替行走的步态。行走的步态时序如图3所示,图中横坐标表示时间,“T”为一个步态周期,纵坐标表示在某一时刻各DEA驱动状态。
行走的步态时序如表1所示。表1中,设定行走方向为正向向前,其中,“+”表示驱动,“-”表示释放,“T”表示一个步态周期。
3 结束语
本文针对某些极端环境下不利于人工操作的工程探测问题,通过对软体机器人材料、结构、制造方法以及步态控制4个方面进行研究,提出了一种新型4足爬行软体机器人的设计方法。该机器人长106 mm,由6个堆叠DEA驱动,具有驅动电压较低、响应速度快、结构紧凑且输出力及位移较大等特点。将硅酮弹性体与单壁碳纳米管电极组合的叠层DE及集成电子控件应用于4足爬行机器人,目前依然是一种富有创新性和挑战性的研究。该研究为制作DEA奠定基础,对软体机器人的前期设计具有指导意义,也为机器人将来能在极端环境下执行任务提供可能。
参考文献:
[1] Rus D, Tolley M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521: 467475.
[2] Jin B, Song H, Jiang R, et al. Programming a crystalline shape memory polymer network with thermoand photoreversible bonds toward a singlecomponent soft robot[J]. Science Advances, 2018, 4(1): 16.
[3] 李铁风, 李国瑞, 梁艺鸣, 等. 软体机器人结构机理与驱动材料研究综述[J]. 力学学报, 2016, 48(4): 756766.
[4] Gu G, Zou J, Zhao R, et al. Soft wallclimbing robots[J]. Sci Robot, 2018, 3(25): 112.
[5] Morales D, Palleau E, Dickey M D, et al. Electroactuated hydrogel walkers with dual responsive legs[J]. Soft Matter, 2014, 10(9): 13371348.
[6] Nguyen C T, Phung H, Nguyen T D, et al. Multipledegreesoffreedom dielectric elastomer actuators for soft printable hexapod robot[J]. Sensors and Actuators A: Physical, 2017, 267: 505516.
[7] Ji X, Liu X, Cacucciolo V, et al. An autonomous untethered fast soft robotic insect driven by lowvoltage dielectric elastomer actuators[J]. Science Robotics, 2019, 4(37): 111.
[8] Shintake J, Cacucciolo V, Shea H, et al. Soft biomimetic fish robot made of dielectric elastomer actuators[J]. Soft Robotics, 2018, 5(4): 466474.
[9] Li G, Chen X, Zhou F, et al. Selfpowered soft robot in the mariana trench[J]. Nature, 2021, 591: 6671.
[10] Shintake J, Rosset S, Schubert B E, et al. DEA for soft robotics: 1gram actuator picks up a 60gram egg[C]∥Proceedings of SPIE the International Society for Optical Engineering. San Diego, California, United States: EAPAD, 2015: 16.
[11] Christianson C, Goldberg N N, Deheyn D D, et al. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators[J]. Science Robotics, 2018, 3(17): 18.
[12] 李国瑞. 介电高弹聚合物力电耦合调控与软体机器人研究[D]. 杭州: 浙江大学, 2019.
[13] Madsen F B, Daugaard A E, Hvilsted S, et al. The current state of siliconebased dielectric elastomer transducers[J]. Macromolecular Rapid Communications, 2016, 37(5): 378413.
[14] Suo Z. Theory of dielectric elastomers[J]. Acta Mechanica Solida Sinica, 2010, 23(6): 549578.
[15] Duduta M, Clarke D R, Wood R J. A high speed soft robot based on dielectric elastomer actuators[C]∥IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017: 43464351.
[16] Duduta M, Wood R J, Clarke D R. Multilayer dielectric elastomers for fast, programmable actuation without prestretch[J]. Advanced Materials, 2016, 28(36): 80588063.
[17] Haghiashtiani G, Habtour E, Park SH, et al. 3D printed electricallydriven soft actuators[J]. Extreme Mechanics Letters, 2018, 21: 18.
[18] Opris D M, Molberg M, Walder C, et al. New silicone composites for dielectric elastomer actuator applications in competition with acrylic foil[J]. Advanced Functional Materials, 2011, 21(18): 35313539.
[19] Rosset S, Shea H R. Flexible and stretchable electrodes for dielectric elastomer actuators[J]. Applied Physics A, 2013, 110(2): 281307.
[20] 崔超宇. 基于介電弹性体的双稳态驱动器设计与分析[D]. 广州: 华南理工大学, 2018.
[21] Li T, Li G, Liang Y, et al. Fastmoving soft electronic fish[J]. Science Advances, 2017, 3(4): 17.
[22] Li T, Zou Z, Mao G, et al. Agile and resilient insectscale robot[J]. Soft Robotics, 2019, 6(1): 133141.
[23] Shepherd R F, Ilievski F, Choi W, et al. Multigait soft robot[J]. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108(51): 2040020403.
[24] Tolley M T, Shepherd R F, Mosadegh B, et al. A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1(3): 213223.
A Design Method of Soft Robot Based on Dielectric Elastomer
YAN Xixi, HE Tian
(College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266071, China)
Abstract: In view of some engineering detection problems that are not conducive to manual operation in extreme environment, this paper proposed a new design method of fourlegged crawling soft robot by studying the material, structure, manufacturing method and gait control of soft robot. The robot body is actuated by a soft structure composed of silicone dielectric elastomers (DEs) film and a singlewalled carbon nanotubes film. In order to reduce the driving voltage of the soft robot, the thickness of the DEs film and the singlewalled carbon nanotubes film is limited. At the same time, in order to increase the output force to support the weight of the robot body, the laminated structure of DEs is used. The design results show that the soft robot is 106 mm long and actuated by six stacked DEAs (dielectric elastomer actuators), which has the characteristics of low driving voltage, fast response speed, compact structure and large output force and displacement. The research laid a foundation for the subsequent model making and robot application.
Key words: dielectric elastomers; soft robots; design
猜你喜欢
中国品牌(2020年11期)2020-12-23
红领巾·萌芽(2020年2期)2020-05-07
学校教育研究(2019年23期)2019-12-23
Coco薇(2017年5期)2017-06-05
艺术评论(2016年10期)2016-11-28
Coco薇(2015年12期)2015-12-10
缤纷家居(2010年1期)2010-01-12
中国名牌(2009年6期)2009-07-20
体育教学(2009年11期)2009-07-14
文学少年(小学版)(2009年3期)2009-05-13