
可控式墙式氧气吸入器的设计
2021-08-19 03:51:56张振姚文欣张明强刘昊铭何谦
机械工程师 2021年8期
张振,姚文欣,张明强,刘昊铭,何谦
(湖南师范大学工程与设计学院,长沙 410081)
0 引言
随着医疗技术的发展,集中供氧的方式已在全国医院普及。目前,传统形式的医用浮标式氧气吸入器被广泛地应用于临床。医护人员需要根据医嘱通过旋转旋钮设置供氧浓度,并按时作出调整,记录患者吸氧的起止时间。这大大增加了医护人员的工作量,并且医护人员由于工作繁忙常常会忘记患者的供氧进度,没有及时调控。
目前,改进型氧气吸入器主要有超声波氧气流量传感计费器、光电控制智能化吸氧计时器等。超声波氧气流量传感计费器通过超声波氧气流量传感器进行检测,自动感知氧气流量并计时,同时借助液晶显示屏显示氧气流量和吸氧时间[1]。光电控制智能化吸氧计时器利用光电技术探测氧气流量计浮标的位置,可累加计时,操作简便,计时准确[2]。但是这些新型氧气吸入器只是记录了供氧信息,并未实现对氧气吸入器的自动控制[3-5]。为了解决上述问题,在传统的墙式氧气吸入器的基础上进行改进,设计一种能够通过人机交互自动完成供氧过程的可控式墙式氧气吸入器。
1 可控式墙式氧气吸入器的控制和性能指标
可控式墙式氧气吸入器利用单片机的软件控制功能,采用LCD液晶显示屏显示实时信息,利用矩阵按键作为数据输入模块建立起外界与单片机内部的联系,利用步进电动机驱动板作为控制信号输出模块,步进电动机将电能转化为机械能。该装置能够人为设定供氧浓度与供氧时长、实时显示供氧状态并在结束时自动响铃。操作简单,计量精确,能减少医护人员工作量,改善治疗效果。其性能指标为:输入电压为5.5~3.3 V、LCD显示、氧气流量为0~10 L/min、结束响铃提醒、工作温度范围为-40~85℃,相对湿度<90%RH。
2 开发与实现
如图1所示,可控式墙式氧气吸入器是对现有的墙式氧气吸入器进行改进,由墙式氧气吸入器、联轴器、步进电动机、控制部分、壳体组成。将墙式氧气吸入器的旋钮取下,把露出的芯轴通过联轴器与步进电动机主轴连接,通过控制单元控制电动机的旋转角度,实现对供氧浓度和供氧时长的自动控制。
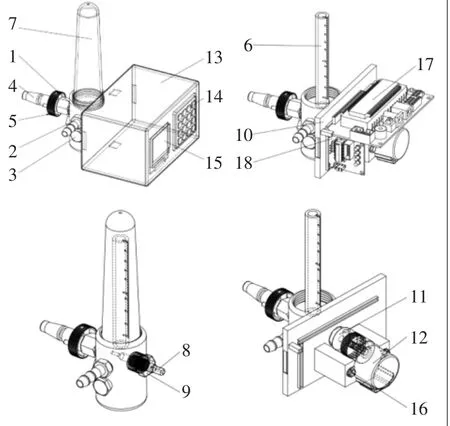
图1 可控式墙式氧气吸入器结构示意图
2.1 硬件结构
墙式氧气吸入器用于将供氧口处的氧气输送给病人。联轴器将墙式氧气吸入器中流量调节阀的芯轴与步进电动机主轴连接。步进电动机利用脉冲信号通过联轴器控制流量调节阀门开口大小,进而控制供氧浓度。壳体用于固定和支撑装置各个部件,保护内部电动机和控制单元不被损坏。
1)墙式氧气吸入器。现有的墙式氧气吸入器包括阀体、流量计、进气口、出气口、流量调节阀、安全阀等。供氧流量和浓度通过医护人员扭动旋钮调节阀口大小实现。先将墙式氧气吸入器的旋钮取下,把露出的芯轴通过联轴器与步进电动机主轴连接。
2)壳体。壳体分为后支撑壳体和前盖两部分,后支撑壳体中间的圆孔与调节阀螺母外螺纹处契合,同时靠近吸入器的一面向外延伸出与阀体直径相同的弧线形状的两边支撑脚与阀体外侧贴合,且圆孔直径在轴线方向上呈阶梯式,在阶梯交界处形成圆环面抵在螺母头部,此结构能够让壳体固定在装置上而不发生旋转和脱落,前盖为无盖的长方体形状的薄壁件,并在前面开有2个矩形通孔,以便于安置按键外套和显示屏。
3)步进电动机。步进电动机选用28BYJ-48四相五线步进电动机,其动力强、体型小巧、质量较轻,并且直径与氧气吸入器流量调节阀的轴直径大小相同,可以用统一直径的弹性联轴器进行联结,该联轴器同样较为轻巧,并且能够传递较大转矩。
2.2 控制系统
控制单元,包括单片机模块、步进电动机驱动板、LCD液晶显示屏、按键等。控制单元接收从按键传来的输入信号,运行程序输出相应的控制信号,控制步进电动机旋转对应的角度。如图2所示,主控电路主要包括单片机电路、步进电动机驱动电路、按键电路、蜂鸣器电路和显示电路。
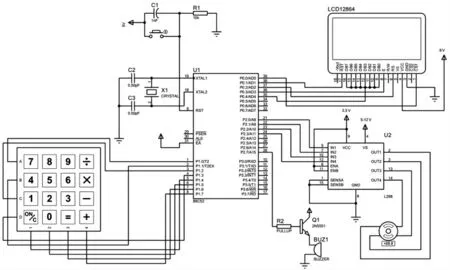
图2 电路图
1)单片机模块。单片机模块选用89C52单片机,其存储空间和数据处理速度足够,并且编程简单方便、体积小巧灵活。单片机作为主控电路的核心,接收按键的输入信号并利用程序进行计算处理,将得到的输出数据利用步进电动机驱动板对外控制步进电动机。
2)步进电动机驱动模块。驱动模块选用ULN2003驱动板,其具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点。根据单片机的输出信号向步进电动机发射一定量的脉冲信号,控制步进电动机转过相应的角度。
3)液晶显示模块。LCD液晶显示屏选用LCD12864液晶显示屏,因为它电压低、功耗低、价格低,适合本装置使用。显示屏实时显示数据设定信息与供氧状态信息,方便医护人员设定供氧数据、观察供氧情况和随时作出调整。
4)按键模块。按键选用4×4矩阵按键,稳定性高,灵敏精确。按键作为建立外界与内部之间联系的模块,选用3个按键作为LCD上时常显示的功能按键,选用10个按键作为代表0~9共10个数字输入的数字按键。
3 软件设计
调查显示,对于普通病人的供氧,一般供给固定的低浓度氧气;而对于血氧浓度低于90%的病人则需要先供给较高浓度的氧气一段时间后再供给低浓度的氧气。所以,本装置设有单时段供氧与双时段供氧2种供氧模式。
图3所示为本装置工作程序图,主程序包括按键读取程序、液晶显示程序、电动机控制驱动程序、定时中断程序等。
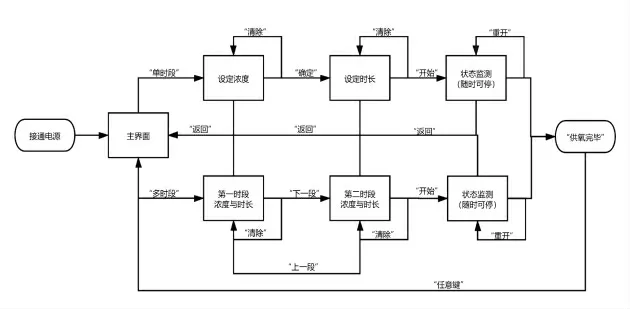
图3 控制流程图
具体操作方法和工作状态介绍如下:装置通电后自动开机,选择“单时段”或“多时段”的供氧模式,设置好每个时段供氧浓度与时长后,按下“开始”按键,步进电动机转过设定浓度对应角度调节阀门开口大小,进行自动供氧,在完成供氧后屏幕显示“供氧完毕”状态,同时蜂鸣器响铃提示供氧完成,此时按下任意键返回首界面。
在设定数据时,可随时返回首界面或清除当前设定数据;在供氧时,可随时停止或重新开始供氧。由于在实际应用中流量与时间精度要求并不高,一般为整数,所以本装置所设计的输入数据单位精确到小数点后一位,满足实际应用要求。
4 输入输出关系计算
由于本装置是通过人机交互实现自动供氧过程的,所以需要求出医护人员的手动输入量与吸入器自动输出量之间的数学关系,即显示屏输入的供氧浓度与步进电动机带动调节阀芯轴转动相应角度的关系。
如图4所示,已知调节阀芯轴端部为一个大端直径为2 mm、锥度为∠1∶15的细长圆台,芯轴通过螺距p=0.5 mm的螺纹连接与固定在阀体上的螺母配合,通过旋转芯轴利用螺纹配合将旋转运动转换为直线运动,推动芯轴圆台部分在阀体内一直径为2 mm、长度为6 mm的圆柱形孔内来回移动控制圆台面与圆柱形孔面相互配合在轴线方向上投影形成的圆环面积,即控制开口面积。
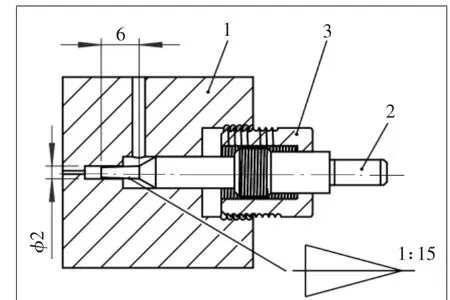
图4 调节阀螺母、芯轴与阀体配合截面示意图
当芯轴通过旋转在轴线方向上移动了一段距离时,圆环面积计算式为:
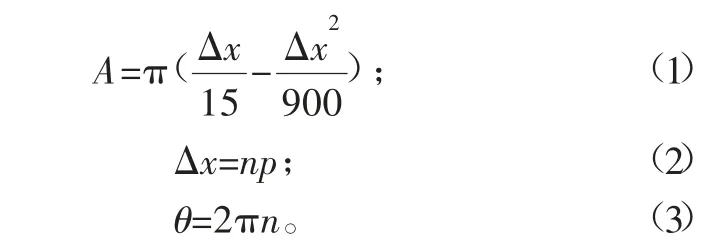
式中:A为轴线方向上投影形成的圆环面积,mm2;Δx为圆台底面与圆柱形孔端面之间的距离,mm;n为芯轴转过的圈数;p为芯轴与螺母配合螺纹的螺距,取p=0.5 mm;θ为芯轴转过的角度,rad。
将式(2)、式(3)代入式(1)得
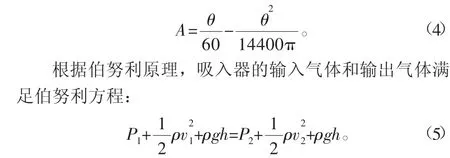
式中:P1为吸入器输入气体压强;v1为输入气体流速;P2为输出气体压强;v2为输出气体流速;ρ为气体密度;g为重力加速度;h为气体与水平地面高度。
将式(5)整理得

其中:接于病房中心供氧终端使用的墙式吸入器的输入端的工作压力P1=0.4 MPa;输出端工作压力范围为0.20~0.30 MPa,取P2=0.3 MPa;v1可由仪器测得;ρ可通过查阅相关资料[6]得到。
对于最常用的双孔型鼻氧管,病人所需氧气浓度的计算公式为:

根据式(4)、式(6)、式(9)与四相五线步进电动机性质可得步进电动机所需脉冲数与供氧浓度之间的关系。在编写程序时根据上述关系建立以供氧浓度为自变量、脉冲数为因变量的关系式,实现供氧浓度的精确控制。
5 结论
氧气对于患者的临床医疗发挥着重要的作用。能否在治疗过程中精确稳定地供氧、对供氧状态进行实时监控,对治疗效果有着重要意义。该装置具有如下特点:1)通过人机交互实现不同时段、不同浓度的全自动供氧,操作方便,减轻医护人员的劳动量;2)能够提供最常用的双孔型鼻氧管供氧服务,涵盖了大部分的吸氧患者,普适性好,易于推广;3)在原有基础上增设控制模块,拆装方便,结构原件、电子器件简单。
经过实际应用,认为本装置设计合理、计量准确、操作简单、成本低,将会在临床应用中有很好的发展。
猜你喜欢
振动与冲击(2022年10期)2022-05-30 10:55:42
山东冶金(2019年5期)2019-11-16 09:09:26
经济技术协作信息(2018年11期)2019-01-14 03:07:22
食药用菌(2017年4期)2017-08-02 08:00:30
山西建筑(2016年8期)2016-11-05 02:12:03
爆笑show(2016年4期)2016-06-17 18:28:48
现代冶金(2016年6期)2016-02-28 20:53:13
华东理工大学学报(自然科学版)(2015年1期)2015-11-07 09:15:33
华东理工大学学报(自然科学版)(2015年1期)2015-11-07 09:15:33
装备制造技术(2015年7期)2015-02-20 13:47:34
