纳米级医学机器人路径规划设计
2021-08-18 08:19张焕梅
山西电子技术 2021年4期
田 静,张焕梅
(太原工业学院机械工程系,山西 太原 030008)
0 引言
以纳米级医学机器人为研究对象,对其在人体血管内的路径规划进行设计,并用栅格法将三维物理环境进行抽象化处理,结合蚁群算法,制定路径规划方案和使用Matlab软件进行建模实验仿真并针对此方案的参数进行比较优化。
1 路径规划简介
路径规划是运动规划的最主要的研究内容之一[1]。运动规划由路径规划和轨迹规划两部分组成,连接起点位置与终点位置的序列点或曲线被称为路径,这种构成路径的策略称之为路径规划[1]。
简单来说就是机器人从出发点到终点既能绕过障碍物,又用时最短并且走过的路程最短的研究方法[2]。
1.1 路径规划的环境建模
路径优化设计的第一步就是进行环境建模,将复杂的现实三维物理空间抽象简化为二维平面。既降低了路径规划的难度,排除了其他不可控的影响因素,也便于算法编码后被计算机识别。
1.1.1 建模方法的选择
地图环境建模的目的主要是使地图环境信息便于计算机识别,再进行路径规划。一般的环境建模方法有:人工势场法,可视图法,栅格法等。
由于本文采用Matlab软件仿真,为了方便建模以及尽量简化地图方便计算机识别,采用栅格法作为环境建模的方法。
栅格法,即用二进制编码的栅格来表示地图环境,把包含障碍物的栅格标记为障碍栅格,没有障碍物的栅格标记为自由栅格,以此为基础进行路径规划[1]。
如图1所示,黑色栅格表示为障碍物,白色栅格表示为自由空间。在算法中,黑色栅格为1,白色栅格为0,如图2所示。
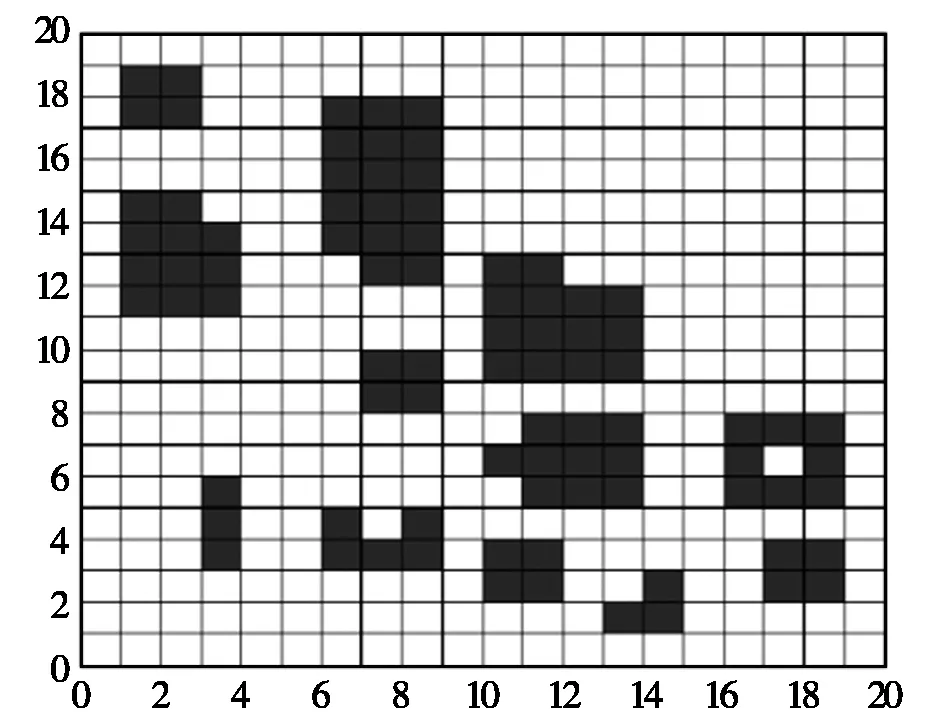
图1 平面建模示意图
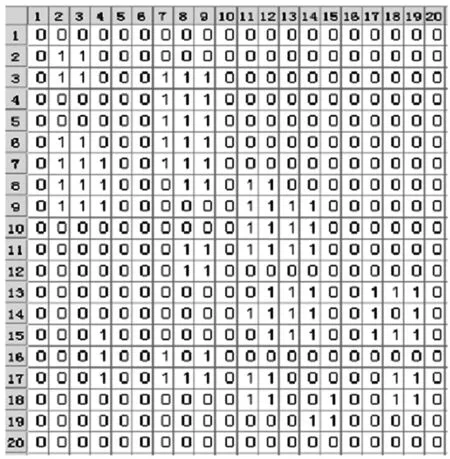
图2 平面建模编码示意图
1.2 路径规划的研究算法
路径优化设计的最主要部分就是优化算法的选择,而优化技术作为一种基于数学并且应用于各种工程问题的优化的技术,在各个领域有着广泛的研究。目前,研究路径规划问题的常用算法有:蚁群算法、神经网络算法、遗传算法等[1]。
1.2.1 研究算法的选择
目前最热的研究算法是人工智能领域(AI领域)的神经网络算法,由于是对神经网络系统的模仿,所以对信息的分布式并行处理速度很快,适用于已知的多次使用的地图并有自我学习功能,但是本论文研究的是纳米级医学机器人,所在的环境复杂多变,并且纳米级医学机器人用途是治疗疾病,并不能多次使用地图环境,泛化能力差。而遗传算法是一种迭代算法,由于缺少蚁群算法的正反馈机制,运算效率低。因此,选用并行性、鲁棒性好,易于用计算机实现的蚁群算法作为研究算法。
1.2.2 蚁群算法的步骤
第一步:初始化算法及地图信息
初始起点为S点,并加入禁忌表TABUKm中(Km=1,2,3,……,m),禁忌表TABUKm记录每一次机器人走过的栅格,每一次机器人的数目是M,K为机器人迭代次数。
第二步:按照蚁群算法选择下一步移动
当时间为t时,τxy(t)为栅格x到栅格y的信息素量(初始含量为τ0),Alpha(以下简称A)表征信息素重要程度的参数,Beta(以下简称B)表征启发式因子重要程度的参数,每一次机器人下一步从栅格S点移动到栅格I点的概率如式(1)[3]:
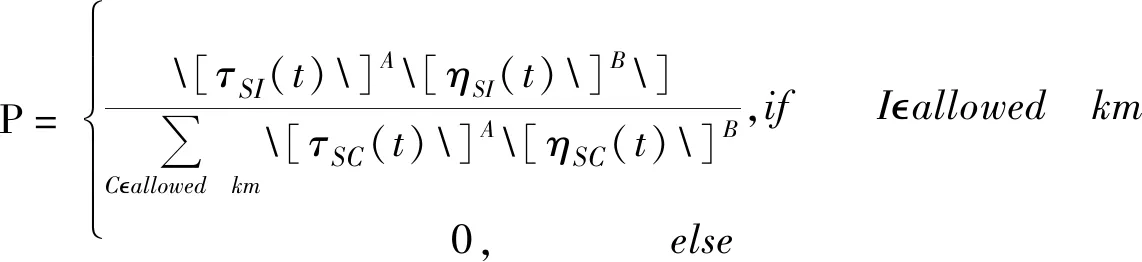
(1)
其中,η是蚁群算法中的启发因子,一般是机器人从栅格x移动到栅格y的期望程度,表示栅格x到栅格y的距离dxy的倒数,即η=1/dxy。allowedkm={1,2,3,…,n}-TABUKm表示机器人下一步可以移动的所有栅格。
在机器人移动时,如果一直选择上述式子所产生的概率大的栅格作为下一步前进的栅格,就会容易失去随机性并且陷入大部分算法都有的局部最优解的问题。因此,引入转轮盘的方法增加选择的随机性,使路径规划更合理。
第三步:信息素的更新
一般来说,蚁群算法的信息素更新有三种不同的模型,分为Ant-Cycle System,Ant-Quantity System,Ant-Density System,它们的区别在于每次迭代时信息素的增量△τ的表达式不一样[3]。
当时间为t时,第K只机器人在路径(S,I)上的信息素增量△τ:
Ant-Cycle System

(2)
Q表示信息素的强度,其强弱程度与算法的收敛程度有关;LK表示第K只机器人在此次迭代中走过的路径(S,I)的长度[4]。
由于本论文研究的纳米级医学机器人的路径规划问题类似于TSP(旅行商问题),所以采用Ant-Cycle System模型作为蚁群算法的信息素更新模型。
因此,蚁群算法中信息素的更新按式(3)进行:
τ(t+△t)=(1-Rho)*τ+△t.
(3)
其中,Rho表示信息素蒸发系数(为了防止信息素无限增加,一般Rho的取值范围为[0,1)),1-Rho表示信息素的残留系数[5]。
第四步:循环迭代过程,直到达到最大迭代次数K。
第五步:记录并保存最优路径,绘制收敛曲线与路径图像,算法结束。
2 Matlab软件实验仿真
本论文使用Matlab软件进行机器人的路径规划仿真。编写Main.m程序,包含地图信息、路径规划以及图像输出功能。
如图3所示,最短纳米机器人运动轨迹就是规划出的最优路径。如图4所示,当算法迭代到50次左右时,最短路径长度趋于平稳,即算法的收敛程度趋于稳定。最短路径长度为32.62。
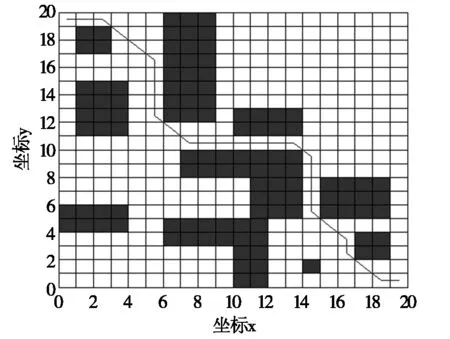
图3 最短纳米机器人运动轨迹示意图
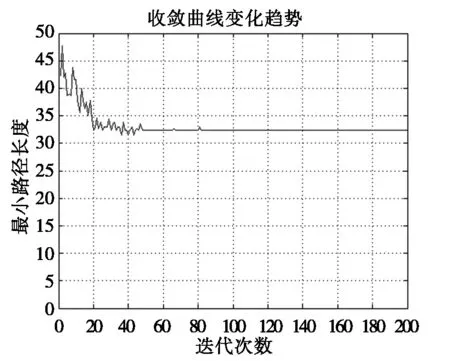
图4 算法收敛曲线图
3 进一步优化实验参数
通常的路径规划设计只是单纯的对路径进行规划设计,并不会去对规划好的方案进一步优化而本论文研究的方案是基于蚁群算法、使用Matlab软件仿真的,所以可以通过修改编写好的蚁群算法程序中影响算法性能的一些参数来提高算法性能,从而提高路径规划方案的效率。
在蚁群算法中,根据其特点,影响算法的参数主要有:机器人数目、信息素挥发系数Rho、信息素重要程度的参数Alpha、启发式因子重要程度的参数Beta、信息素增加强度系数Q。
通过控制变量的方法,依次改变上述参数,根据Matlab软件输出的路径规划收敛曲线的数据画出折线图,再根据折线图选择最优参数。初始参数为机器人数量为50、信息素挥发系数Rho取值区间为0.3,信息素重要程度的参数Alpha的数值采取1,启发式因子重要程度的参数Beta数值采用7,信息素增加强度系数Q的数值取1。
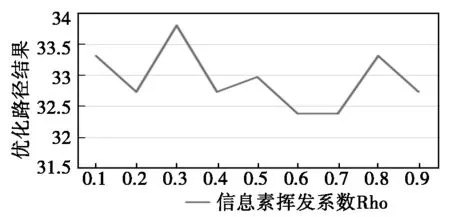
图6 信息素挥发系数Rho对算法优化的影响数据折线图
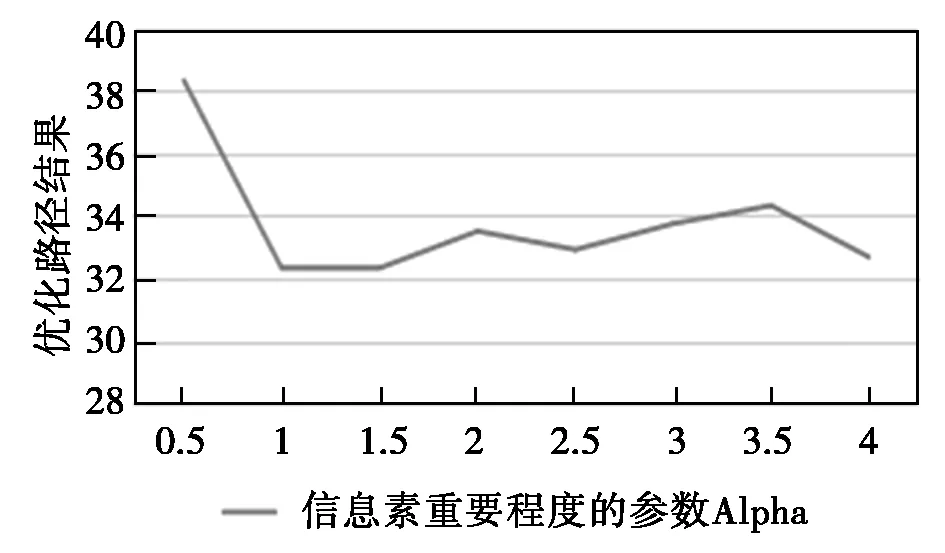
图7 信息素重要程度的参数Alpha对算法优化的影响数据折线图
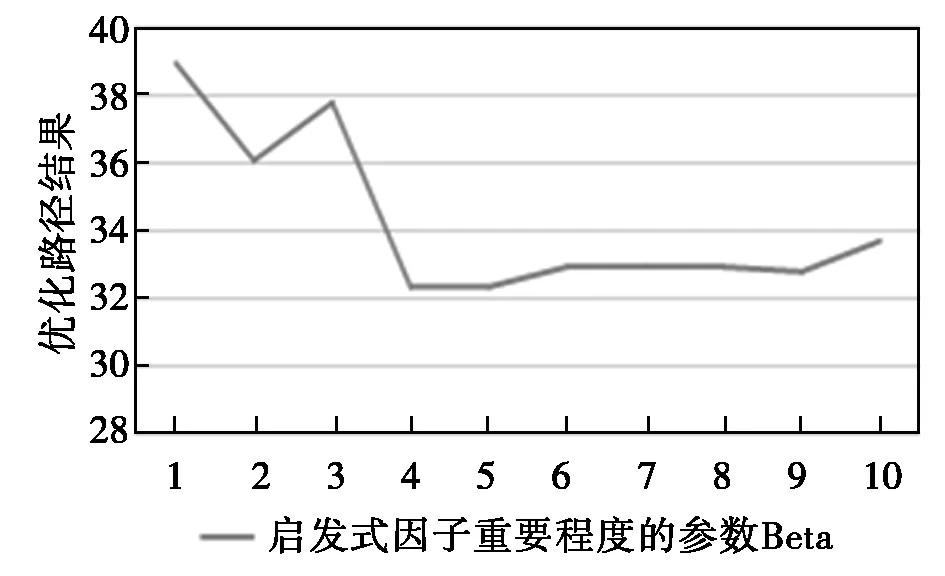
图8 启发式因子重要程度的参数Beta对算法优化的影响数据折线图
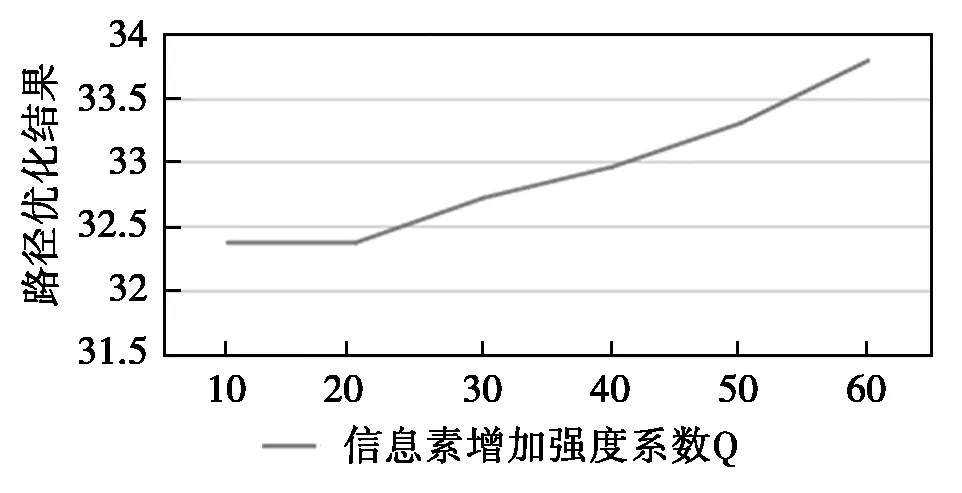
图9 信息素增加强度系数Q对算法优化的影响
如图5、6、7、8、9所示,机器人数量为75、信息素挥发系数Rho取值区间为[0.6,0.7],信息素重要程度的参数Alpha的数值采取[1,1.5],启发式因子重要程度的参数Beta数值采用[4,5],信息素增加强度系数Q的数值取(0,20]时,路径优化结果最优。
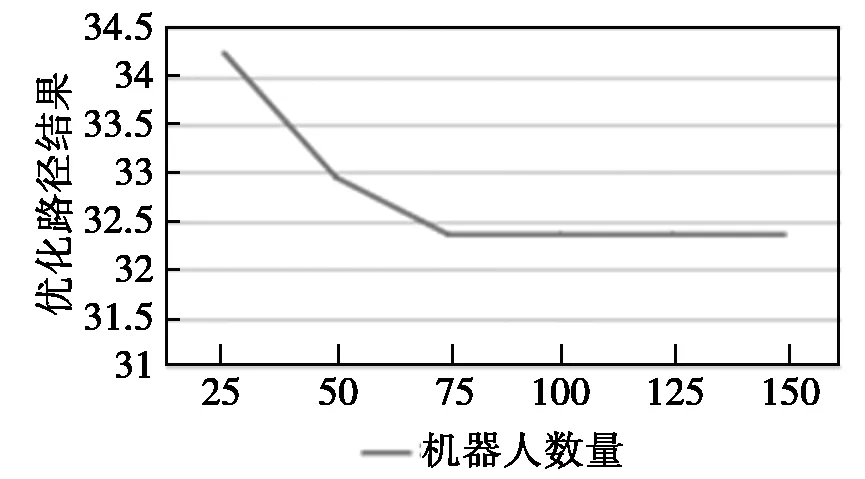
图5 机器人数目对算法优化的影响数据折线图
本论文的仿真实验证明了蚁群算法与栅格法在机器人路径规划中的可行性及优势。蚁群算法的优势在于信息素的引用,可以根据机器人留下的信息素浓度进行路径更新,不断地去优化之前的路径,直到得到最优的路径。而栅格法可以将客观的环境清晰明朗的展现出来,在得出结果后可以得到路径规划的地图。
这两种算法的结合使用既可以简单有效的在较短的时间内规划出一条最短的路径,又避免了其他算法在这种情况下存在的一些缺点,提高了路径规划的效率。
4 结论
论文针对纳米级医学机器人路径规划设计进行研究,提出了以栅格法为环境建模方法和此基础上对实验数据进一步筛选优化,得出针对纳米级医学以蚁群算法为路径规划研究算法的组合优化方案,并使用Matlab软件进行仿真实验,验证此机器人路径规划设计的最优方案。不仅提高了算法的响应速度和性能,也为以后研究出更好的、由二维平面结构向三维空间结构推广应用提供了研究方向。
猜你喜欢
科技创新与应用(2021年31期)2021-11-09
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中北大学学报(自然科学版)(2020年4期)2020-07-13
初中生世界·九年级(2020年2期)2020-04-10
电子制作(2019年14期)2019-08-20
今日农业(2019年10期)2019-01-04
电子制作(2018年17期)2018-09-28
新农业(2018年3期)2018-07-08
弹箭与制导学报(2015年1期)2015-03-11
太空探索(2014年11期)2014-07-12