
石墨烯改性弹性织物的应变传感性能研究
2021-08-17 07:23田明伟曲丽君朱士凤
棉纺织技术 2021年8期
杨 宁 王 进 田明伟 曲丽君 朱士凤
(青岛大学,山东青岛,266071)
随着老龄化社会的全面来临,加之健康被现代社会重新定义,纺织柔性传感器受到市场的密切关注。与传统的传感器相比,新型的柔性传感器具有轻质低模、多维多尺度、低成本、结构多元多维化、高柔性及弹性、高亲肤性、可弯曲、可折叠甚至可洗涤的特点,可与服装无缝连接,实现一体化设计和应用[1⁃2]。纺织基柔性力学传感器因其结构可变化性、组合可设计性等特点在智能可穿戴领域具有很大的应用潜力[3]。
织物结构传感器是指传感器的敏感元件为一块具有针织结构或机织结构的织物[4⁃7]。不同织物组织结构的弹性面料以其优良的延伸性和弹性可作为传感器的柔性基底应用于人机交互领域中,与人体相关的多种形变能够被有效检测,例如脉搏、作用于人体表面的轻微压力等小尺度形变和手指运动、四肢运动等大尺度应变[8]。传感器将获得的人体形变信息通过软件进一步处理,大大提高了人机交互过程的效率和精度,对于检测人体生理活动具有重要作用[9⁃12]。
本研究以不同弹性织物作柔性衬底,制备了不同传感性能的传感器,通过定伸长拉伸试验考察传感器的电阻变化率与应变之间的关系及回复性,分析不同弹性织物结构对传感性能稳定性和灵敏性的影响。
1 试验部分
1.1 试验材料
织物1为涤氨包覆弹力纱的斜纹机织物(170 g/m2,经纬纱均为T 18.5 tex+Pu 44.4 dtex),织物2为涤纶斜纹机织物(190 g/m2,经纬纱均为12.2 tex/144 F涤弹力丝),织物3为锦氨双罗纹针织物(160 g/m2,锦纶/氨纶65/35),以上3种织物均由青岛旭腾纺织有限公司提供;石墨烯溶液(固含量为1.2%,石墨烯片层厚度2 nm~3 nm,石墨烯片层尺寸5μm~15μm,溶剂为蒸馏水),由青岛华泰科技有限公司提供。
1.2 样品制备
将石墨烯溶液放在恒温磁力搅拌仪上分散搅拌1 h,再将3种织物分别用搅拌均匀的石墨烯溶液通过丝网印刷方法进行单次涂层改性处理,烘干之后得到石墨烯改性弹性织物。
2 性能测试方法
利用ST⁃2258C型多功能数字式四探针测试仪对石墨烯改性织物的方阻进行测量。测量范围5.0×10-6Ω~1.0×106Ω。
利用RiKo DKC⁃1B型步进电机控制器、Keithley 2601B参数分析仪对石墨烯改性织物的灵敏性和回复性进行测量。
3 结果与讨论
3.1 伸长率
通过手动拉伸方法,测试3种石墨烯改性前织物的伸长率,结果见表1。其中,织物1和织物3使用了氨纶。氨纶具有400%~800%的伸长率,且伸长500%时的回复率高达95%~99%,将其应用于织物中对织物弹性有显著提高。锦氨双罗纹针织物比其他两种机织物具有更好的弹性和伸长。
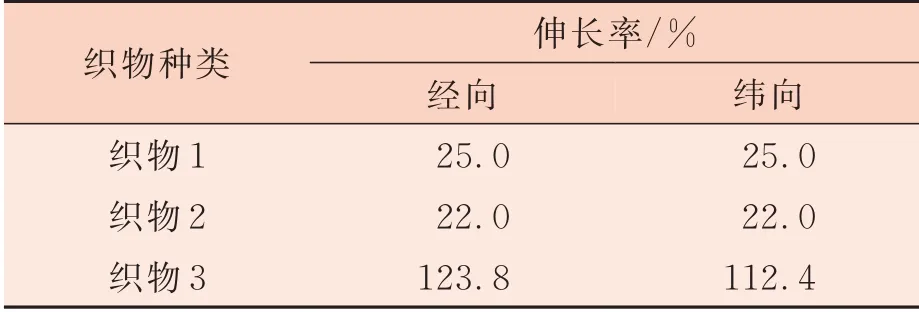
表1 织物伸长率
3.2 导电性
利用ST⁃2588C型多功能数字式四探针测试仪,采用4根呈同一直线的探针对被测织物表面施加一定的垂直压力,测得织物1的方阻为37.6Ω,织物2的方阻为37.9Ω,织物3的方阻为17.2Ω。可以看出,石墨烯可以很好地提高织物的导电性。导电性与涂料粒径、黏度及附着力有关。质量分数为1.2%的石墨烯溶液在织物1、织物2上只涂覆一层时,涂层方阻仅为37.6Ω和37.9Ω。适当增加石墨烯的涂覆次数可增加织物导电性,涂层次数增多,纤维表面石墨烯包覆层加厚,织物内部纤维包覆效果更好,织物导电性改善。导电性还与待涂层织物的表面结构有关。织物表面的组织疏松程度、孔隙大小及多少等影响涂层对织物的包覆效果。石墨烯溶液具有一定流动性,容易深入疏松多孔的织物,使织物表面溶液分散均匀,导电性增加。质量分数为1.2%的石墨烯溶液涂覆织物时,织物1、织物2为右斜纹机织物,经纬纱间孔隙较小,纱线排列较密,织物致密厚实、硬挺,不利于溶液渗入。相比织物3为双罗纹针织物,织物由线圈串套且织物的两层线圈之间有一定间隙,织物多孔洞与间隙,疏松柔软,溶液能更好渗入双罗纹针织物的孔洞与间隙,对针织物组织的包覆性更好。织物3的方阻小于前两种织物的方阻。
3.3 电阻变化率与应变的关系
所用试样规格为10 cm×10 cm。将3种试样沿经向拉伸至最大应变限度,利用Keithley 2601B型参数分析仪测得不同应变范围内的电阻起始值及变化值,经向应变电阻曲线如图1所示。从图1中可以看出,当传感器应变小于12.5%时,不同石墨烯改性的弹性织物柔性传感器的电阻变化率与应变均呈线性关系。

图1 经向电阻⁃应变曲线
根据公式G F=(ΔR/R0)/ε计算传感系数,以计算传感器的灵敏度,其中,ΔR为加载应变时电阻的变化,R0为无应变时的电阻,ε为施加应变。通过计算,可得出织物1、织物2、织物3的G F分别为29.20、4.31、0.93。织物1作为传感器,具有较好的传感系数,可应用于脸部微表情、脉搏跳动、声带振动等微小形变的监测,应用于人体健康检测与识别。织物2制成的传感器可应用于手指部位,识别手指对不同文字的书写。将此传感器缝入手套中,可识别手部各种动作;将其缝入椅子坐垫及床垫中,可检测人体休息时的状态。织物3作为柔性衬底传感系数较低,可被应用于人体的腕部、肘部、膝盖等大形变监测,可以准确反映人体不同时刻的运动状态及身体姿态。
3.4 重复性
一个良好的应变传感器应具有高灵敏度、低电阻值特性。灵敏度高使得传感器在探测到0.2%等微小应变时会出现明显的信号变化,但高灵敏度的应变传感器在多次重复使用后容易出现信号误差。为得到更具耐久性与稳定性的柔性衬底,将传感区尺寸为10 cm×10 cm的织物结构柔性传感器沿经向从原长拉伸至0.2%应变状态下,反复拉伸5000次并同步记录其电阻变化率,结果如图2所示。
由图2可以看出,织物均可在施加力与去除力时达到指定的阻值。织物3为双罗纹针织物,反复拉伸过程可认为是变形前针织物线圈结构的平衡遭到破坏,而向新的平衡过渡的过程。一是线圈内弯曲纱线外形变化。试样拉伸方向长度增加,垂直方向缩短,部分线段伸直,部分线段更加弯曲。二是纱线在线圈中的方向变化。纱线在线圈中的方向与对织物的拉伸方向间夹角减小,使线圈中的线段在织物拉伸方向的投影长度总和增加。三是纱线间接触点移动。线圈中部分纱段向另一纱段转移,如圈柱向圈弧转移或反之。因此,对于织物3在反复拉伸时表现出的电阻相对变化没有织物1、织物2稳定,织物1、织物2具有更良好的稳定性和可重复性。
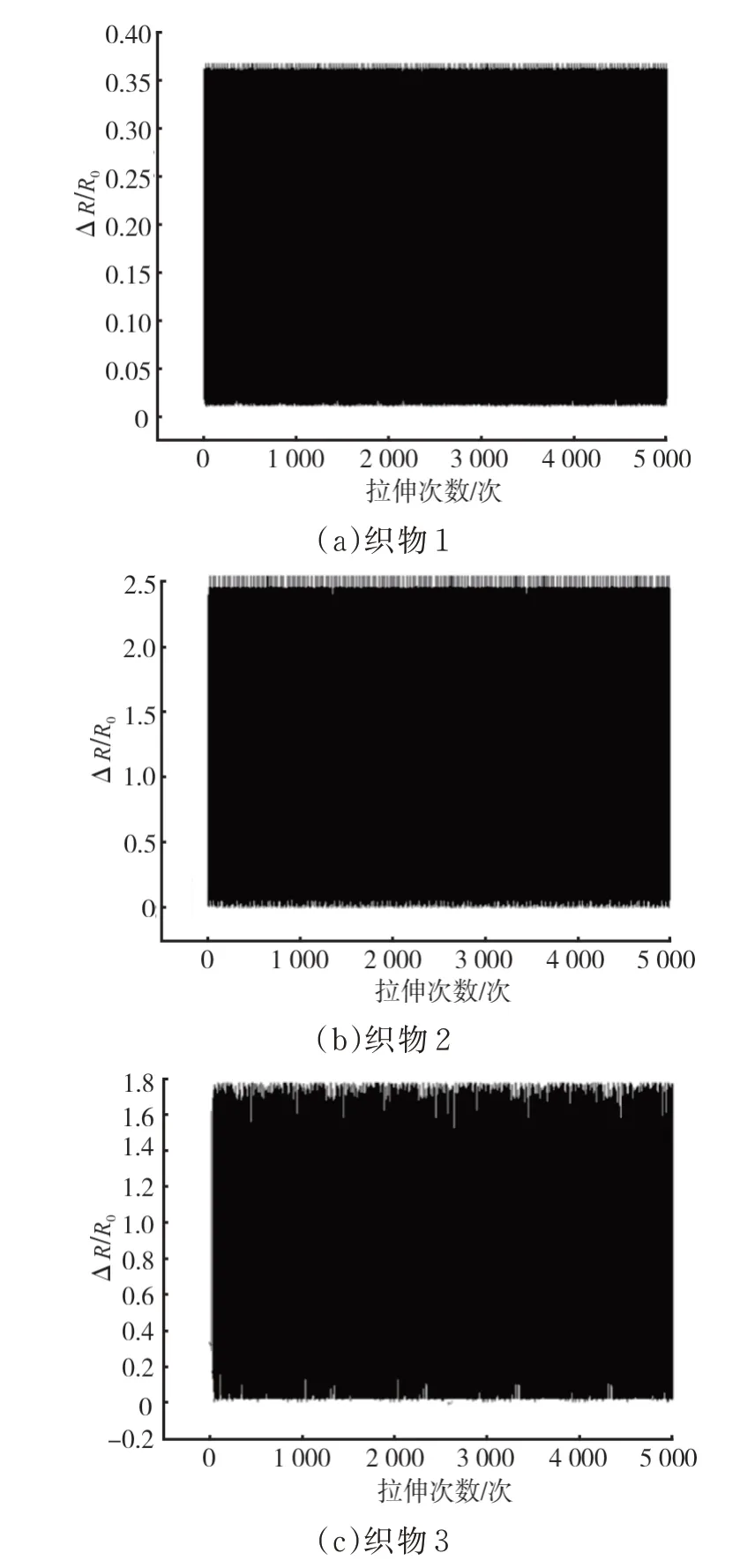
图2 织物重复性测试
4 结论
将不同弹性织物作柔性衬底应用于传感器,并对这些传感器的伸长率、导电性、灵敏性、回复性进行测试与分析。织物3导电性优于其他两种织物。3种织物传感器在应变小于12.5%时,均能保持电阻变化率与应变的线性关系。织物1的传感系数为29.2,显著高于其他两种织物传感系数,具有高灵敏度,更加适用于脉搏、呼吸等微小形变。在回复性测试中,当对织物施加0.2%的应变进行反复拉伸时,织物3的线圈结构平衡破坏,向新平衡过渡,其回复性和稳定性比其他两种织物差。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
材料与冶金学报(2022年2期)2022-08-10
纺织标准与质量(2022年3期)2022-08-10
纺织科学研究(2021年7期)2021-12-02
纺织科学研究(2021年7期)2021-08-14
纺织科技进展(2021年5期)2021-07-22
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
化学教学(2017年1期)2017-03-01
