
基于模糊-EKF模型的锂离子电池SOC联合估算
2021-08-16 07:45梅周盛夏靖武
客车技术与研究 2021年4期
周 斌,梅周盛,陈 林,夏靖武
(汉腾汽车有限公司,江西 上饶 334000)
电池管理系统(BMS)作为电动汽车电池系统的关键控制单元,对电池系统的性能发挥起着至关重要的作用[1]。BMS中的一个核心功能指标SOC又是BMS设计中的重中之重。
目前SOC的估算方法主要有四类[2],其中安时(Ah)积分法在工程应用中最为广泛,也是最基本的一种算法,但存在两个明显的缺陷:一是初始SOC值无法确定;二是累计误差无法消除[3]。基于电池特征参数法是依据开路电压(OCV)和SOC一对一的关系进行估算,但获取开路电压需要电池长时间静置[4]。基于数据驱动的方法主要包括神经网络、模糊神经等,这一类算法需要获取电池在不同情况下的各种数据,利用大量数据对模型进行训练以获取精准的SOC计算,这类方法依赖于获取电池大量数据,难度大,对芯片数据处理能力要求也高[5-7]。基于模型的估算方法主要有卡尔曼滤波法、粒子滤波法等,在建立精确的电池等效电路模型基础上估算SOC,其估算精度可以达到较好的效果,但对模型精度依赖较大[8-10]。可见使用单一的SOC算法很难获得满意的效果。
本文首先建立锂电池的二阶(以下简称2-RC)等效电路模型并进行参数识别,然后依据扩展卡尔曼滤波(EKF)算法建立SOC估算模型并进行验证和分析,最后基于模糊控制建立EKF、Ah积分、OCV的联合估算模型,实现SOC实时估算,避免单一算法的缺陷。
1 锂离子电池等效电路模型参数识别
1.1 锂离子电池等效电路模型
建立精确的锂离子电池等效电路模型是EKF估算SOC的基础,常用的等效电路模型[11-12]有:Rint、Thevenin、n-RC(n≥2)等。其中Rint和Thevenin等效电路模型结构清晰、运算简单,但是精度上n-RC等效电路模型(n≥2)更优,一定范围内n越大精度就越高,但n过大其精度反而会降低,工程应用也更复杂。综合考虑模型精度及工程应用,本文选择2-RC等效电路模型,如图1所示。

图1 2-RC等效电路模型
图中R0表示锂电池的欧姆内阻,R1C1、R2C2组成的电路用于描述锂电池内部的极化效应,电压源U(s)表示电池的OCV值,其与电池SOC有关。UL表示负载电压;I表示电流(充电时为正,放电时为负)。根据等效电路可以得到如下公式:
UL=U(s)-U0-U1-U2
(1)
(2)
通过式(1)、(2)和试验数据可对图1模型中R0、R1、R2、C1、C2进行参数辨识。
1.2 模型参数识别
锂离子电池可看作一个非线性动态系统,在不同SOC时通过对系统施加一个恒流脉冲信号,计算电池输出特性并加以识别,可以得到电池模型的各个参数。采用指数拟合的方法[13]进行参数识别计算。


图2 恒流脉冲电池电压变化曲线

(3)
式中:UOCV为开路电压;U1(t)、U2(t)分别为AB段R1C1、R2C2网络端的电压值。
在BCD区域,B点以后电池从放电状态转换为静置状态,当电流为零的一瞬间,电池电压会有一个跳变(即BC段的电压ΔU1),这是由于欧姆内阻所致。根据ΔU1可计算出欧姆内阻R0=ΔU1/I。

(4)
对AB及CD段试验数据进行指数拟合,并联合式(3)、(4)可识别出R1、R2、C1、C2。按照相同方法可分别识别不同SOC下模型的上述参数值。
识别出上述参数后,通过Simulink建立仿真模型,以图3中工况循环数据对应的电流值作为仿真输入,得到电池端电压仿真结果,将其与试验值进行比较,如图4所示,结果表明:最大误差在40 mV以内,平均误差为2.01 mV,2-RC等效电路模型能较好地反映电池的动态特性。
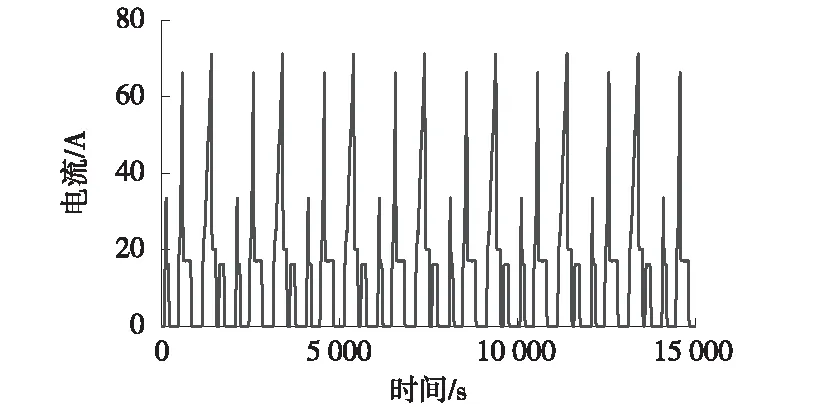
图3 工况电流曲线

图4 等效电路模型仿真值与试验值
2 EKF的锂离子电池SOC估算
2.1 EKF的SOC算法实现
EKF是针对非线性系统的一种滤波算法,将局部非线性化系统通过泰勒级数展开并去除高阶小量,以获取线性化系统,利用前一时刻的估算值和当前测量值进行递归推演,得到当前的最优估计值。利用EKF估算SOC时,其精度与电池模型精度、初始值、协方差矩阵均密切相关,特别是电池模型的精度。
EKF系统状态方程Xk和观测方程Zk如下:
Xk=AXk-1+Buk-1+wk-1,Zk=G(Xk,uk-1)+vk-1
(5)
式中:Xk为状态变量;uk-1为输入变量;Zk为观测变量;wk-1和vk-1分别为系统的随机输入噪声和观测噪声,wk-1和vk-1的方差与状态量初值无关,分别为Q和R。
根据电池等效模型计算公式(1)、(2),RC网络计算公式(3)、(4),以及Ah积分公式,得到系统状态及各个参数矩阵,如下:
(6)
(7)
(8)
式中U(s)为电池系统OCV,由试验数据通过MATLAB进行最小二乘法拟合,得到SOC的表达式。OCV的拟合精度直接关系到电池模型端电压的测量精度,因此也影响EKF对于SOC估算的精度。
确定好系统方程参数后,根据EKF步骤及递推公式,得到k时刻协方差矩阵Pk和增益矩阵Kk:
(9)
(10)
在MATLAB/Simulink中构建算法和模型,输入电池相关数据分别计算矩阵A、B、C和协方差矩阵P、增益矩阵K,并进行递推计算得到最终的估算结果,实现锂离子电池SOC的EKF估算。
2.2 EKF估算结果分析
使用50 Ah的锂离子电池测试数据,根据2.1中的计算方法进行EKF估算,选取常用的NEDC工况,设置EKF模型初始SOC为50%,得到如图5的SOC估算值,并与试验SOC真实值进行对比。

图5 EKF估算SOC结果
可以看出,EKF估算SOC在启动后300 s左右收敛到真实SOC值,此后的估算误差均较理想;当EKF收敛以后,SOC估算的误差在4%以内,并且当电流波动大导致残压变大或者呈现脉冲突变时,SOC误差也随之变大。
以上结果表明:二阶等效电路模型的EKF算法可以有效地进行SOC估算,并且收敛后的误差≤4%;等效电路模型的计算精度直接影响EKF估算的精度。
3 基于模糊控制的SOC联合估算
3.1 模糊控制联合估算模型的建立
从上述EKF方法及结果看,首先计算值需要一定的时间到达收敛,其次电池模型的精度直接影响估算精度。为解决EKF存在的此问题,利用模糊控制将EKF法、开路电压法和Ah积分法彼此联合,发挥各自算法的优势,建立联合估算算法对锂电池SOC进行估算。
本文采用Sugeno模糊控制系统模型[14-15]建立两个模糊控制器:①以BMS下电休眠时间Ts为输入,以开路电压SOC值SOCOCV的系数αOCV为输出的单输入单输出模糊控制器。②以运行时间Tr和单位周期内电流变化率ΔI作为输入,以EKF法的SOC值SOCEKF的系数βEKF作为输出的两输入单输出的模糊控制器。利用这个模糊控制器将EKF法、OCV法和Ah积分法进行联合,建立联合估算模型:
SOC0=αOCV·SOCOCV+(1-αOCV)·SOCold
(11)
SOCR=βEKF·SOCEKF+(1-βEKF)·SOCAh
(12)
式中:SOCAh为Ah积分法的SOC值;SOC0为初始SOC值;SOCR实时运行SOC值;SOCold为BMS内部储存的上次SOC值。
隶属度函数和规则是模糊控制器的关键,使用钟形函数。如图6所示,分别为单输入单输出系统中输入参数下电休眠时间Ts的隶属度函数曲线,两输入单输出系统中电流变化值ΔI和运行时间Tr的隶属度函数曲线。

图6 隶属函数曲线
参考实际电流的采样周期,以0.5 s时间间隔计算其时间的电流变化值ΔI。为确定不同ΔI对模型残压和EKF估算SOC的影响,将测试数据输入模型仿真,结果表明:当ΔI越小,模型残压越小且EKF估算SOC误差越小;当ΔI≥60 A后,模型残压和EKF估算SOC的误差值均保持在较高值,且几乎相同。故电流变化值ΔI的变化区间选取为(0,60 A),运行时间区域选取为(0,5 000 s),输出类型选用常数类型。ΔI选用Small、Mid、Big三个模糊语言进行描述,Tr用Short、Mid、Long三个模糊语言描述。结合图6,构建输出系数βEKF模糊规则,见表1。

表1 两输入单输出系统模糊规则
根据上述输入变量的隶属度函数和构建的模糊规则,最终系数αOCV和βEKF的输出控制图分别如图7和图8所示。在Simulink中将模糊控制器、EKF的SOC估算模块、Ah积分模块进行结合,用精准语言建立基于模糊控制的SOC联合估算模型,如图9所示。

图7 αOCV输出曲线

图8 βEKF输出曲线

图9 联合估算模型
图9所示的联合估算模型主要包括:SOC0计算模块、EKF计算模块、Ah积分计算模块以及模糊控制模块。SOC0计算模块用于计算初始SOC,先由模糊控制器确定系数αOCV,再根据该系数确定SOCOCV和SOCold的比例,进而计算出SOC0;EKF计算模块即为2.1中的EKF估算,是利用EKF法估算出电池SOCEKF;Ah积分模块利用Ah积分计算出SOCAh;模糊控制模块是将各个SOC计算模块进行联合。将试验数据代入联合估算模型中,可进行SOC联合估算。
3.2 模糊控制联合估算结果分析
将图10中实际采集的电流工况数据,代入3.1中所建立的SOC联合估算模型,得到联合估算SOC,并将其与EKF估算SOC和Ah积分SOC及真实SOC进行对比,如图11所示。

图10 NEDC工况实际电流激励曲线

图11 联合估算与安时积分、EKF估算结果对比
将三者估算值与真实试验SOC值进行对比得知:Ah积分法无法确定初始SOC值,整个计算过程一直无法消除误差;EKF法估算SOC在初始未收敛阶段估算误差较大;联合估算模型初始计算时通过模糊控制器计算系数αOCV,再根据式(9)结合SOCOCV和SOCold确定初始SOC值。实例中初始SOC的误差缩小到3%以内,较好的消除误差。
从联合估算SOC误差和EKF估算SOC误差曲线可知,联合估算最大误差为3.12%,EKF最大误差为3.92%,EKF估算时波动相对更大,这是因为模糊控制的联合估算法实时分配了SOCEKF和SOCAh的比例,减少了因电流波动造成的SOCEKF估算误差,整个过程相比于EKF,其SOC变化相对更加平滑,并且最大误差更小。
4 结束语
本文基于模糊控制建立的EKF法、Ah积分法和OCV法的联合估算模型,实现了SOC的实时精准估算。相较于单一的算法,该联合估算模型能够很好地进行初值估算、消除累计误差,实时SOC估算值波动更小,估算精度得到改善,与实测相比最大误差仅为3.12%。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
现代仪器与医疗(2021年1期)2021-06-09
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
