
基于STM 32的无菌恒湿实验装置的设计与实现
2021-08-16 07:27李士军欧阳航
现代电子技术 2021年16期
陈 本,李士军,欧阳航,孟 楚,肖 培,孙 宇
(1.吉林农业大学 信息技术学院,吉林 长春 130118;2.吉林省智能环境工程中心,吉林 长春 130118)
0 引 言
随着生命科学技术的不断发展,细胞体外培养技术已成为一种现代科研的基础手段[1]。体外培养技术的关键是搭建出一个仿真活体的生存环境,如适宜的空气温湿度、合适的光照度、适当的CO2浓度等,整个过程需要对搭建的模拟环境的温湿度和气体浓度进行相应的实施控制[2-3]。国内实验室常用的是传统普通的恒温恒湿箱,其内部基本上没有除菌装置,而对于某些细胞培养实验,实验人员可在局部净化的无菌工作台上进行操作[4],将细胞放置在培养皿中,将培养皿盖上盖子后,使用封口膜将培养皿封闭,保证其内部不受外界干扰。密封后的培养皿会放置在恒温恒湿箱内进行进一步培养,培养皿内部的温度可由恒温恒湿箱内部的温度控制,而培养皿内部的湿度则因为外部封闭而导致内部变为一个封闭环境,所以无法由恒温恒湿箱来控制。通常的解决办法是向培养皿中间滴1~2滴水,测得其内部湿度数值,这种方法精度较低,实验效果不理想,极大影响实验结果。但若不将培养皿封盖,则会受到恒温恒湿箱内部的交叉污染,同样会影响实验结果,对科研人员的实验进程造成困难[5-7]。
为了解决上述问题,部分高校、研究所组建了无菌实验室,但大部分高校、研究所等无力搭建无菌实验室、更难以承受无菌实验室的后续维护成本。本文主要设计了一种无菌恒湿实验装置,其优点表现在:结构简单、组装方便,不污染恒温恒湿箱内部环境、可广泛在常规实验室中使用,提高了实验数据的准确率。
1 实验装置总体设计
1.1 硬件总体结构设计
本文所设计的无菌恒湿装置整体结构示意图如图1所示,其内部分为三个舱室:培养皿舱室,加湿干燥舱室和控制舱室,其中,培养皿舱室密封性良好,通过密封圈和锁扣可以很好地把舱室内部与外界隔绝开,免除外界对实验的干扰。加湿干燥舱室中主要由水箱和干燥管组成,因为培养皿舱室内部空间较小,仅靠水蒸气自然挥发就可以对培养皿舱室进行加湿,若增加加湿器,虽然加湿速度变快了,但是会导致培养皿舱室内部的相对湿度出现较大的波动,稳定性较差。使用干燥管进行干燥,同样是为了提高系统的稳定性,降低系统的功耗。控制舱室用STM32F103ZET6作为控制芯片,所需要的空气温湿度传感器、显示模块,电源模块都与其连接,采用模糊PID算法对气泵进行控制,使其实现增湿和排湿功能。实验人员可在超净工作台对本装置进行杀菌处理,最后把装置放进普通恒温恒湿箱。从图1中可以看出,导气管与塑料接头相接,培养皿舱室不与外界接触,可以有效降低外界感染的风险,培养皿舱室舱门上安装有密封垫圈及锁扣装置,更加确保了内部是一个闭环循环系统。
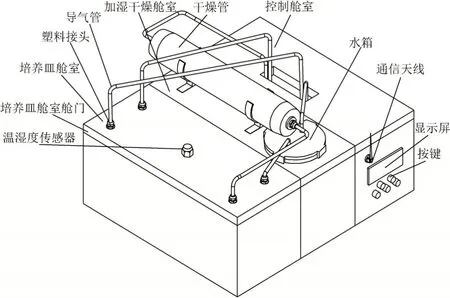
图1 无菌恒湿装置整体结构示意图
1.2 装置工作流程
装置工作流程如图2所示。其主要包括SHT10空气温湿度的数据采集,LCD显示屏,控制信号产生,控制算法和无线通信。首先,通电后对系统进行初始化,STM32读取当前时间和实验设定时间,SHT10传感器读出装置内部当前空气温湿度,通过单片机和4G通信模块分别在LCD显示屏和PC端显示出来,用户可以通过装置外部按键和PC端输入目标值,PID算法可以对当前值和目标值进行比对,单片机控制气泵做出加湿或除湿操作,并对时间进行判定,若达到实验终止时间,则发出警报,并记录数据,未到达时间,则重新读取当前时间和实验设定时间,并最终达到实验设定时间。
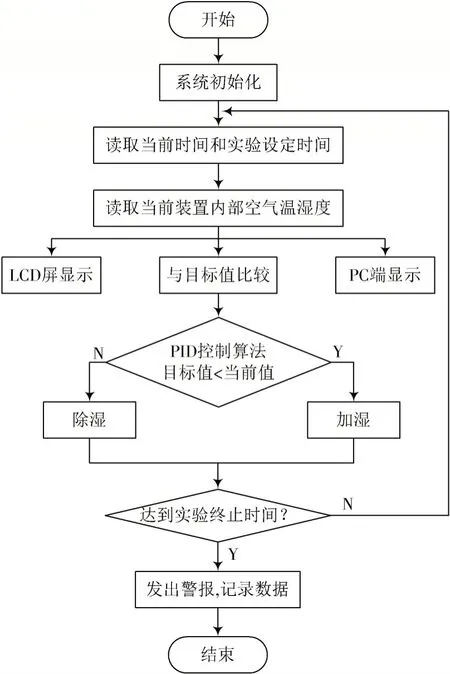
图2 装置工作流程图
1.3 装置使用流程
以细胞体外培养实验为例,简述装置使用流程:
1)在实验开始前,使用肥皂洗手;
2)将该实验箱放置在超净工作台,启动超净工作台的排风、紫光灯,对培养皿舱室、水箱、干燥管、导气管进行充分杀菌,给水箱内倒入蒸馏水;
3)在超净工作台中,实验培养皿制作完毕后,将培养皿放入培养皿舱室,关闭培养皿舱室舱门,将整套设备搬离超净工作台;
4)将实验箱放入普通恒温恒湿箱中,电源插头插在培养箱内部的电源接口;
5)通过按动开机按键,启动实验箱控制单元,显示屏显示当前培养皿舱室中的湿度,实验人员可通过湿度调高、调低两个按键选择目标湿度,按下确定按键,控制单元即可按照既定程序开始工作,并通过实验箱侧方的4G天线将实验过程中的湿度数据上传至服务器存储。
2 装置硬件电路设计
为了防止污染恒温恒湿箱及交叉感染,本文设计的无菌恒湿系统是一个闭环控制系统。按照实验目的和要求,对控制部分的硬件进行选型,其结构框图如图3所示。其主要由7个部分组成:单片机、SHT10空气温湿度传感器、气泵、4G模块、按键、LCD显示屏和电源供给模块。
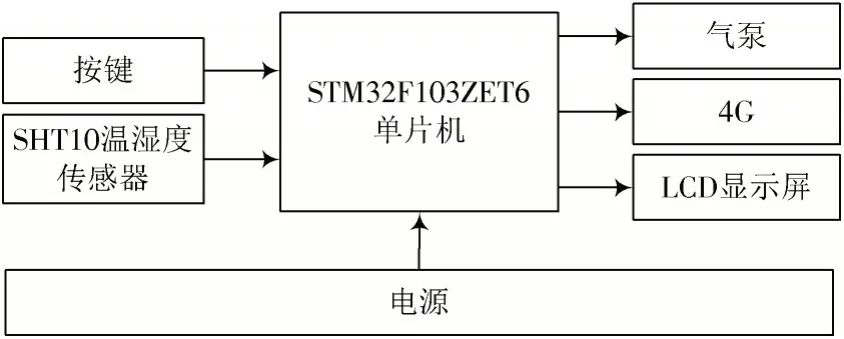
图3 硬件结构框图
本文所采用的MCU是STM32F103ZET6,STM32采用32位Cortex-M3内核,其内部的数据路径、寄存器以及存储接口都为32位。为了使得取指令以及数据访问之间不冲突,CM3采用的是哈弗结构。CM3处理器是Cortex系列的首款产品,采用的是最新的设计技术,在同样的主频之下,可以完成更多的任务,同时其具有低功耗以及高实时性的特点[8-10]。
空气温湿度传感器选用SHT10,其电路原理图如图4所示。SHT10采用高分子PE材料滤芯,在保证测量度的同时滤除灰尘,对高速流动的气体起到缓冲作用,使测量结果更为准确,其温度量程范围是-40~123℃,误差为±5℃;湿度量程范围是0%RH~100%RH,误差为±4.5%RH,满足实验要求。
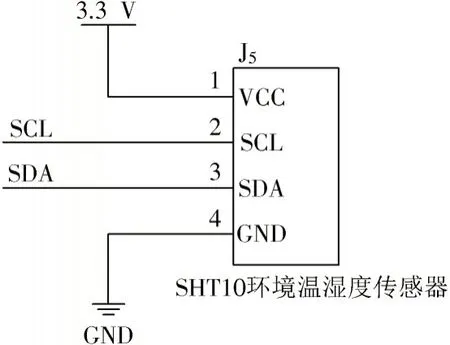
图4 空气温湿度传感器SHT10
电机驱动模块选用的是L298N,其电路原理图如图5所示。L298N可以直接驱动两路3~30 V直流电机,并且支持MCU控制,可以方便地控制直流电机的速度和方向。气泵选用的是EDLP600,它是一款微型隔膜泵,根据容积式泵的原理设计而成,有电机转动提供动力,通过电机轴上的偏心轮,驱动橡胶循环、往复运动,在腔体里面形成吸、排动作,通过单向阀的闭合/打开,从而达到吸入和排出气体的作用。其具有体积小、低噪音、免维护、寿命长、应用广、密封性好等特点。
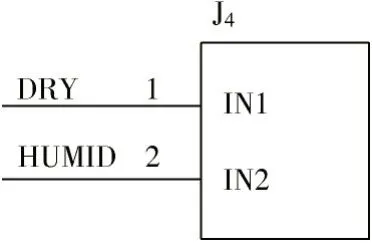
图5 L298N电机驱动模块
无线通信模块选用亿佰特的E840-TTL-4G02模块,其电路原理图如图6所示。4G的无线通信信号更加稳定,提高数据的传输速率,兼容性也更加平滑,通信质量更高。在某些WiFi未覆盖区域或某些WiFi网络差的区域,4G无疑有更大的优势。使用4G模块进行通信可以提高数据传输的可靠性和即时性[11],同时数据上传至服务器,也能供后续科研实验使用。
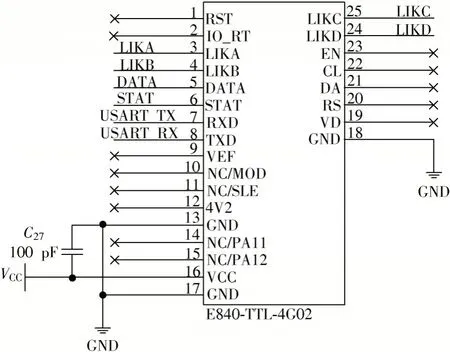
图6 E840-TTL-4G02电路原理图
本装置采用220 V交流供电,使用开关电源220 V转12 V,以获得稳定的12 V直流电压。使用MP1584电源转换模块获取稳定的5 V直流电压,使用ASM1117稳压模块获取3.3 V直流电压,其电路原理图如图7所示。
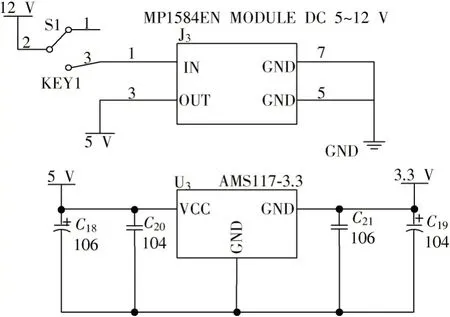
图7 电源供给系统
人机交互模块包括按键,LCD显示屏,用户可以通过按键选择目标湿度,并通过LCD显示屏直观观察到装置内部实时温湿度变化。
3 模糊PID控制
模糊PID控制器的系统结构主要由参数可调PID和模糊控制系统两部分构成,其结构如图8所示[12-14]。
由图8可知,模糊控制由5个控制变量:e()t为输入偏差值;ec()t为输入偏差变化率值;kP为比例因子;kI为积分因子;kD为微分因子。
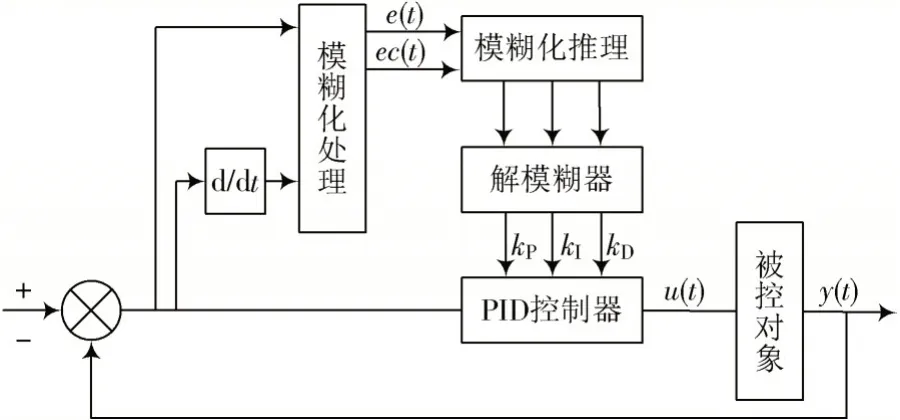
图8 自适应模糊PID控制器结构
本文装置设计的模糊推理系统为两输入三输出系统,e(t),ec(t)为模糊输入,模糊控制系统经模糊化、模糊推理、解模糊实时整定kP,kI,kD三个参数,他们的论域分别为NB,NM,NS,Z,PS,PM,PB七个等级,输入变量的范围为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};输出的变量范围为{-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}。他们的隶属度函数都采用三角形分布。其控制规则如下:
1.If(e is NB)and(ec is NB)then(kp is PB,ki is NB,kd is PS)else;
2.If(e is NB)and(ec is NM)then(kp is PB,ki is NB,kd is NS)else。
4 结果分析
4.1 装置组装
无菌恒湿实验箱由三个舱室组成:培养皿舱室、水箱和干燥管舱室、控制舱室。整个装置由15 mm厚的透明亚克力板制作而成,并且在培养皿舱室中,舱门上装有密封圈,培养皿舱室舱门四周装有弹簧卡扣,用来锁紧舱门并压紧密封圈,消除舱门与舱室的缝隙,管道插头和传感器都由玻璃胶固定封死,有效地保证其内部气密性及无菌效果。水箱和干燥管控制室内装有的水箱和干燥管,水箱中并没有放置超声波加湿器,因为培养皿舱室内部空间较小,仅靠水汽自然挥发就可以达到实验效果,并利用干燥管是向培养皿舱室中通干空气,达到除湿目的。
4.2 运行结果
在湿度控制过程中设置加湿目标相对湿度为50%RH,其对应的湿度控制实际采样曲线如图9所示。从初始相对湿度35%RH升至50%RH,记录的时间为1 h,设置1 s采1次数据,延迟1 s,实际每间隔2.5 s采样1次数据,可以从图9中看出,湿度波动范围较小,在达到稳定状态情况下,湿度最大达到50.6%RH,最小为49.6%RH,误差为±1%RH。设置除湿目标湿度为40%RH,初始湿度为55%RH,记录的时间为1 h,在到达稳定状态情况下,相对湿度最大达到40.3%RH,最小为39.8%RH,误差为±1%RH。综上,虽然相对湿度达到稳态时间耗时较长,但培养舱室内部湿度波动更加稳定,可以为实验细胞提供良好的生长环境,同时达到实验要求。
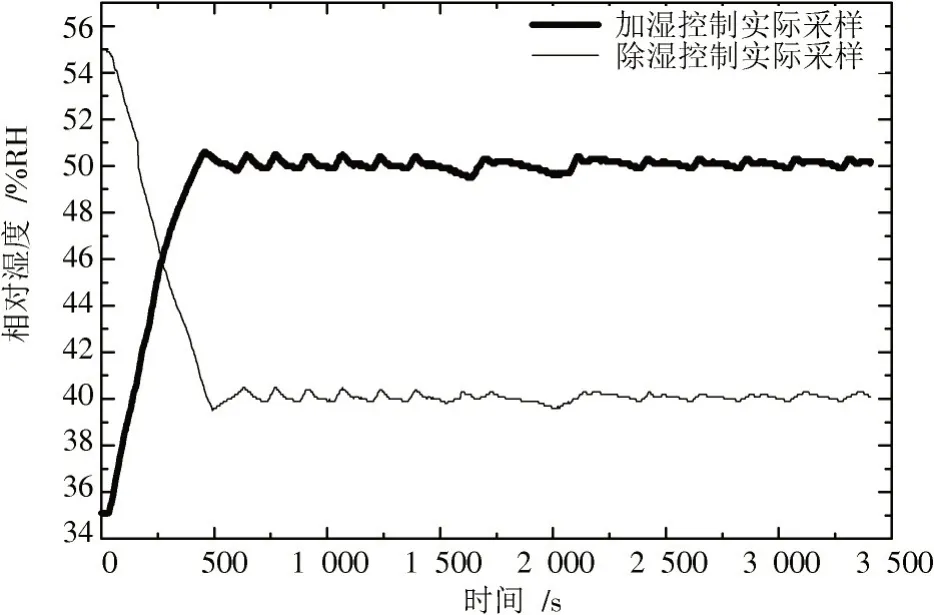
图9 湿度控制曲线
5 结 论
本文针对细胞体外培养技术中的技术难点,分析现有恒温恒湿箱的特点,提出一种基于模糊PID控制的无菌恒湿实验装置。文中首先设计了整个装置的硬件部分,其次设计了整个装置的软件流程,最后提出整个装置的相对湿度模型及模糊PID控制推理系统。通过实验表明,本文装置可以很好地解决体外培养技术中的技术难点,整个系统为闭环循环,不与外界接触,减小了实验细胞和培养箱外部交叉感染的概率,并且通过实测装置内部湿度控制箱内情况,可以看出本装置响应速度快,控制算法精度高,超调小。本文装置可大大提升科研数据准确率,对细胞培养的精确控制具有推广性意义。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
阅读(科学探秘)(2021年9期)2021-05-30
时代农机(2020年4期)2020-12-22
考试与评价·高二版(2020年4期)2020-09-10
橡塑技术与装备(2018年14期)2018-07-20
销售与市场(管理版)(2017年3期)2017-03-28
建材发展导向(2016年6期)2017-01-17
科技与企业(2016年9期)2016-10-21
舰船科学技术(2015年8期)2015-02-27
科技视界(2014年3期)2014-03-01
