基于多源光学遥感数据的湖泊湿地分类结果一致性分析
2021-08-12 08:29:18朱江涛,艾金泉,3*,陈晓勇,汤宇豪
地理与地理信息科学 2021年4期
朱 江 涛,艾 金 泉,3*,陈 晓 勇,汤 宇 豪
(1.东华理工大学江西省数字国土重点实验室,江西 南昌 330013;2.东华理工大学测绘工程学院,江西 南昌 330013;3.东华理工大学江西省大气污染成因与控制重点实验室,江西 南昌 330013)
0 引言
湖泊湿地是指湖泊岸边或浅湖发生沼泽化形成的湿地,不仅可为人类生活和生产提供水、土地、泥炭等丰富资源,还具有调节气候、净化水质、维持生物多样性等生态服务功能,对维持区域生态平衡和保护生态安全具有重要作用[1-3]。遥感技术已成为湿地监测的主流手段[4],且受传感器性能和寿命影响,长时序多源光学遥感数据是监测湖泊湿地长期演变过程不可缺少的数据。但不同遥感数据的时空分辨率、波段设置和光谱响应函数不一致,导致多源光学遥感数据的集成使用存在一定的偏差,在应用前需对其进行数据一致性分析。例如:戴昭鑫等[5-7]利用类型构成相似性、类别混淆程度、空间一致性等指标,对不同土地覆被产品在南美洲、欧洲及中国新疆地区的一致性进行了分析;李光丽等[8]采用Kappa统计量、双错误测量、Q统计量、相同错误率对中空间分辨率光学影像土地覆盖分类结果的一致性进行了评价;顾晓鹤等[9]采用支持向量机(SVM)方法提取冬小麦面积,并对MODIS冬小麦测量结果与TM测量结果进行一致性分析。以上研究表明,不同光学传感器数据生产的地表覆盖产品具有时空不一致性,集成使用多源、多时序遥感数据时需对其不一致性进行定量分析,明确其影响因素和适用范围。
受人类活动和气候变化双重影响,鄱阳湖湿地面临湿地受损、生物多样性降低、洲滩植被退化等问题[10],如何有效地对鄱阳湖湿地变化进行系统监测成为当前的首要问题。然而,前人并未对多源光学遥感数据在湖泊湿地分类中的适用性进行比较研究,导致多源遥感数据在鄱阳湖湿地监测中的集成使用具有很大的不确定性。为此,本文以鄱阳湖湿地为研究对象,基于决策树方法对Sentinel-2A、Landsat-8、GF-1和HJ-1A 4种卫星光学影像进行分类,并采用类型面积偏差分析、类型面积相关分析和空间叠加分析方法研究分类结果的一致性,以期为多源光学遥感数据在湿地长期监测中的应用提供理论依据。
1 研究区与数据
1.1 研究区概况
鄱阳湖(115°47′~116°45′E、28°22′~29°45′N)位于长江中下游南岸,江西省北部,承接上游赣、抚、信、饶、修五河之水,由湖口北注入长江。受亚热带季风气候影响,鄱阳湖降水随季节变化显著,4-9月是雨季,10月至次年3月为旱季,属于吞吐型湖泊[11]。受五河流域水系和长江水位的共同影响,鄱阳湖水位年内差异极大,周期性水位变化导致鄱阳湖泥沙滩涂形成特定生态环境梯度[12]。
1.2 数据及预处理
研究数据为Sentinel-2A、Landsat-8、GF-1和HJ-1A影像数据(表1),为尽量减少不同季节植被丰度和水文动态引起的土地覆盖变化,数据时间选择2019年12月,不同数据仅相差两日,有助于湿地产品的一致性分析。经查阅气象资料,研究期内当地并无降雨,因此,湖泊区域的水文及自然环境变化较小,减小了数据源对分类结果一致性的影响。所有数据通过ENVI软件进行地形校正和FLAASH大气校正,裁剪后重采样为30 m。对于影像中少量厚云影响区域,由于无法利用光谱信息进行分类,采用目视解译方式对湿地进行分类。由于不同传感器的光谱响应和空间分辨率不同,可能会引起分类结果出现一定程度的不一致;Sentinel-2A的分辨率从10 m重采样至30 m,也会影响分类结果的一致性。
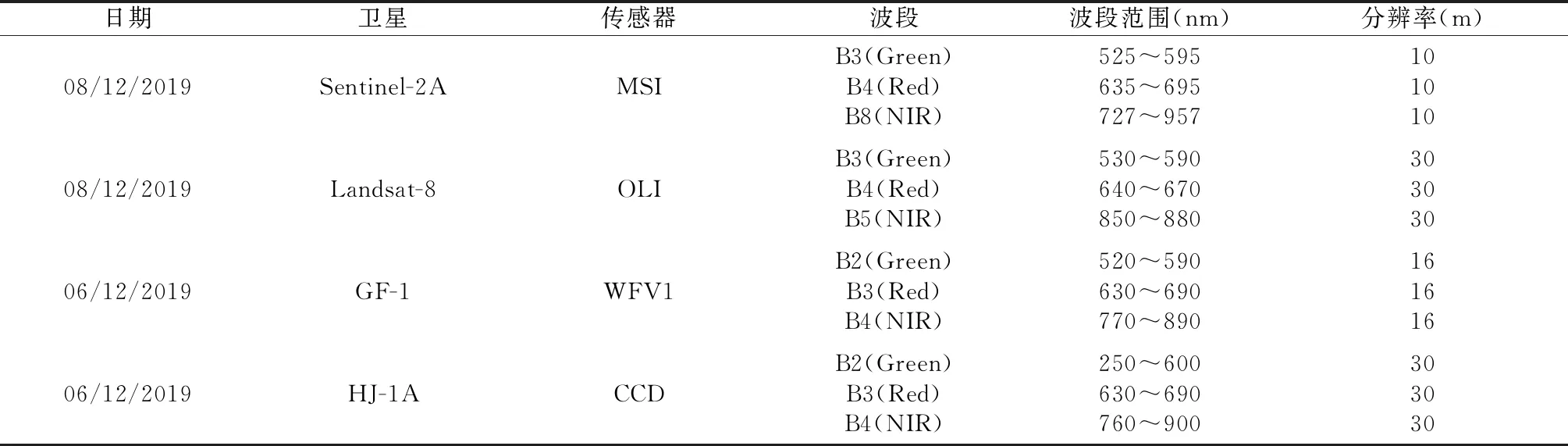
表1 原始影像数据信息Table 1 Original image data information
2 研究方法
2.1 决策树分类方法
决策树分类法层次结构清晰、运算简单、处理速度快,可根据不同传感器特点,基于先验知识选取最优阈值,从而提高湿地分类精度[13-15]。为尽量减少分类方法对分类结果一致性分析的影响,本文仅采用该方法将研究区湿地分为水体、植被和泥沙滩涂,以避免传统的监督分类和机器学习等方法需要选取训练样本而导致分类结果出现偏差,具体流程如图1所示。通过目视解译确定影像中30个水体点和30个植被点,以水体点的NDWI(式(1))[16]和植被点NDVI(式(2))[17]的均值为基准进行反复试验,以最优分类结果(总体精度和Kappa系数最高)为标准确定最优阈值,Sentinel-2A、Landsat-8、GF-1、HJ-1A的NDWI和NDVI阈值分别为0.50和0.60、0.20和0.40、-0.15和0.40、-0.65和0.35。

图1 决策树分类流程Fig.1 Flow chart of decision tree classification
NDWI=(ρGreen-ρNIR)/(ρGreen+ρNIR)
(1)
NDVI=(ρRed-ρNIR)/(ρRed+ρNIR)
(2)
式中:ρGreen为Landsat-8与Sentinel-2A的第3波段、GF-1和HJ-1A的第2波段;ρNIR为Landsat-8的第5波段、Sentinel-2A的第8波段、GF-1和HJ-1A的第4波段;ρRed为Sentinel-2A和Landsat-8的第4波段、GF-1和HJ-1A的第3波段。
2.2 分类结果精度评定
在研究区内随机采集200个检验样本点(图2),根据Google Earth卫星影像进行目视判读,确定检验样本点的真实参考类别;利用检验样本点对分类结果进行误差矩阵分析,得出生产者精度、用户精度、总体精度和Kappa系数[18,19]。

图2 精度验证点分布Fig.2 Distribution of accuracy verification points
2.3 类型面积偏差分析
类型面积偏差系数(P)可有效评价影像分类结果中各类型的分类精度,客观反映各类型面积与均值的偏差[20],偏差系数绝对值越大,说明分类结果中该类型的面积偏差越大。通过统计不同遥感影像分类结果中水体、植被和泥沙滩涂的面积,以4幅影像分类结果中同类型的面积均值作为标准,计算类型面积的偏差系数,公式[21]如下:
(3)

2.4 类型面积相关分析
类型面积相关系数(D)可定量描述2个随机变量的线性相关程度[20],综合评价任意两幅影像分类结果的一致性,相关系数越大,表示两幅影像分类结果在不同类型上面积一致性越高。统计不同遥感影像分类结果的类型面积,通过计算两幅影像分类结果中各类型面积的相关系数,评价该组合面积的一致性程度,公式[22]如下:
(4)

2.5 空间一致性分析
类型面积偏差系数和类型面积相关系数虽然能够定量分析不同分类结果间的一致性程度,但其直观性不强。因此,基于分类结果单独提取各地类并将其转为矢量,之后进行空间叠加分析,获得不同分类结果的空间对应关系,判断不同分类结果的类型是否相同,按照重叠次数分为完全一致(4幅影像结果类型全部相同)、高度一致(3幅影像类型相同)、低度一致(两幅影像类型相同)、完全不一致(4幅影像类型各不相同)[6],并进行专题制图。
3 结果及讨论
3.1 分类结果精度评价
由不同遥感影像的分类精度统计结果(表2)可知,总体精度均高于89%,Kappa系数大于0.84。其中,Sentinel-2A分类结果的总体精度最高,达95.50%,Kappa系数为0.93;HJ-1A分类结果的总体精度最低,为89.50%,Kappa系数为0.84。

表2 分类结果精度评价Table 2 Accuracy evaluation of classification results
从各地类看,水体的分类精度整体较高,用户精度均高于93%,生产者精度均高于87%,是因为旱季水体较易区分,通过阈值提取水体准确率较高;泥沙滩涂的两种分类精度均高于79%,其中,Sentinel-2A的生产者精度最高(97.8%),GF-1的用户精度最高(100.00%);植被的两种分类精度均高于74%,其中,GF-1的生产者精度最高(100.00%),Sentinel-2A的用户精度最高(95.12%)。植被与泥沙滩涂的分类精度偏低,各分类结果均有不同程度的误分,主要是因为旱季(12月)部分泥沙滩涂上有少量植被,造成异物同谱现象。
3.2 面积一致性分析
由表3可知,不同遥感影像的分类结果均以泥沙滩涂为主,水体次之,植被面积占比最小。但4幅影像中各地类面积占比存在差异,是由于部分泥沙滩涂长有稀少植被,不同的传感器对于稀少植被的光谱反射值有一定差异;同时,在旱季部分河岸的水体与泥沙滩涂有一定的过渡性,不同传感器对于浅水地区的分类存在差异。水体分类的面积偏差较小,偏差系数绝对值均小于15%,最小值为Landsat-8的2.33%,是因为旱季水体轮廓较明显、易区分;而植被分类的面积偏差较大,最大值为Sentinel-2A的-31.14%。从面积一致性看,水体最优,泥沙滩涂次之,植被最差。

表3 4幅影像分类结果类型面积百分比及偏差系数Table 3 Area percentage and deviation coefficients of classification results for four kinds of sensor images
如表4所示,4幅影像分类结果的类型面积相关系数均大于0.8,Sentinel-2A与HJ-1A的相关性最强,面积相关系数为0.99999,因为二者分类结果相似,各类型面积占比最接近;GF-1与Sentinel-2A的相关性最差,面积相关系数为0.80711,因为二者分类结果中各类型面积占比差异较大。
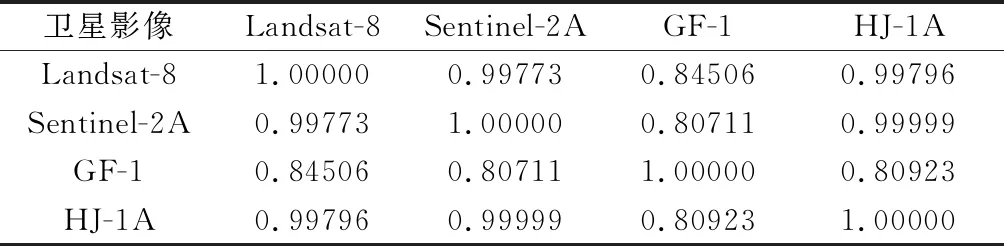
表4 4幅影像分类结果类型面积相关系数Table 4 Area correlation coefficients of classification results for four kinds of sensor images
3.3 空间一致性分析
由图3可知,4幅影像的水体分类边界基本吻合,一致性较高;关于植被类型,Landsat-8(图3a)与GF-1(图3c)的分类结果中植被面积略多于Sentinel-2A(图3b)与HJ-1A(图3d)的分类结果;泥沙滩涂与水体误分区域主要分布于沿河两岸。
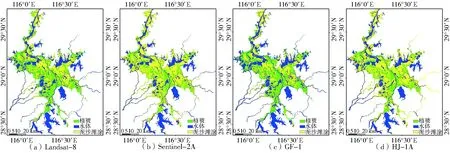
图3 4幅影像的分类结果Fig.3 Classification results for four kinds of sensor images
由图4(彩图见附录2)可知,4幅影像的分类结果在大部分地区一致性程度较高,尤其是在研究区北部和西部。其中,完全一致区域面积占鄱阳湖区域总面积的55.41%,高度一致区域占8.89%,低度一致区域占23.00%,完全不一致区域占12.70%(GF-1将部分浅滩误分为水体所致)。由此可知,该分类结果中64.30%的区域具有高度一致性,35.70%的区域一致性有待提升。具体而言:水体(图4a)表现出高度空间一致性,大部分地区为完全一致,小部分完全不一致区域主要集中在大面积水体边界和细小河流两岸;植被(图4b)主要分布于鄱阳湖中部区域,大部分植被区域完全一致,高度一致区域主要集中在一个长有浅水植被的泥滩地区,低度一致与完全不一致区域则分布在湖岸和细小河岸;泥沙滩涂(图4c)是旱季鄱阳湖地区主要的土地类型之一,完全一致区域位于研究区北部和东部,大部分地区为低度一致,少部分地区完全不一致。整体而言,水体的提取结果空间一致性程度最高,植被次之,泥沙滩涂的一致性程度最差。

图4 分类结果的空间一致性Fig.4 Spatial consistency of classification results
受数据来源、分类阈值等因素影响,4种传感器数据分类结果不尽相同,总体而言,分类结果的面积一致性高于空间一致性。其中,水体的面积与空间一致性程度最高,缘于旱季湖泊水体的光谱特征较明显,利用阈值能对其较好地提取;但旱季部分泥沙滩涂与其上生长的稀少植被存在光谱特征相似、空间分布重叠等现象,导致分类结果一致性较差。
4 结论
本文以鄱阳湖湿地为研究对象,利用决策树方法对Landsat-8 OLI、Sentinel-2A MSI、GF-1 WFV1和HJ-1A CCD的光学影像进行分类,利用混淆矩阵和Kappa系数对分类结果进行评价,并采用类型面积偏差分析、类型面积相关分析和空间叠加分析对4种传感器数据的分类结果进行一致性分析,得出以下结论:1)利用决策树方法与不同光学传感器对湖泊湿地分类效果较好,总体精度为89.50%~95.50%;2)在类型面积一致性上,4种传感器数据分类结果均呈现以泥沙滩涂为主,水体次之,植被最少,各分类结果的一致性程度较高(相关系数为0.81~0.99),但泥沙滩涂与植被的分类结果具有一定面积偏差;3)在空间一致性分析中,研究区内有64.30%的分类结果一致性较高,低度一致区域占23.00%,完全不一致区域占12.70%。
本文仅针对不同光学遥感数据分类结果的面积与空间一致性进行研究,未定量分析不同传感器的波段设置等差异对分类结果的一致性影响,如何通过数据融合体现多源遥感数据的优势,克服单一卫星影像的不确定性,提高分类精度和信息利用率,是今后研究中需要探索的问题。
猜你喜欢
英语世界(2023年10期)2023-11-17 09:18:22
河北地质(2022年2期)2022-08-22 06:24:04
公民与法治(2022年5期)2022-07-29 00:47:28
儿童故事画报·自然探秘(2022年3期)2022-04-27 00:17:10
教学考试(高考物理)(2021年5期)2021-11-08 10:31:22
中医眼耳鼻喉杂志(2021年1期)2021-07-22 07:38:14
现代园艺(2017年23期)2018-01-18 06:58:12
水利科技与经济(2016年8期)2016-04-22 03:41:30
燕山大学学报(2015年4期)2015-12-25 02:19:49
应用海洋学学报(2015年2期)2015-11-22 07:36:28