整流侧换流母线电压恢复导致逆变器换相失败的机理分析
2021-08-12 07:04:18马星李凤婷尹纯亚解超
电力工程技术 2021年4期
马星, 李凤婷, 尹纯亚, 解超
(可再生能源发电与并网技术教育部工程研究中心(新疆大学),新疆维吾尔自治区 乌鲁木齐 830047)
0 引言
我国能源中心与负荷中心相距较远,具有大容量、远距离输电优势的高压直流输电系统得到广泛应用[1]。由于结构复杂,仍存在较多的问题。换相失败是其主要故障之一,成为近期研究的热点[2—3]。
目前针对换相失败的研究大多基于逆变侧交直交互关系展开[4—7]。文献[8]分析了逆变侧交流系统不对称故障引发直流系统连续换相失败的机理,指出故障后实际越前触发角具有周期性波动的特征,极易在系统恢复阶段引发连续换相失败。文献[9]基于实际案例,分析了导致多馈入直流系统同时换相失败的影响因素,并给出了优化措施。文献[10]针对受端交流系统两相故障,分析了过渡电阻和故障时刻对换相电压的影响,并提出了临界电压降的计算方法。文献[11]针对多馈入直流系统,将采用临界多馈入交互作用因子判断换相失败的方法进一步推广到了受端交流系统任意母线。上述研究都基于逆变侧交流系统故障展开,而未考虑整流侧换流母线电压变化对逆变器换相的影响。文献[12]针对多馈出直流系统,推导了关断角与换流母线电压的关系式,指出整流侧换流母线电压升高可能导致逆变器换相失败,但其未考虑直流控制系统的影响。文献[13]推导了整流侧换流母线电压不同程度跌落时的关断角表达式,指出电压恢复会引起直流电流增大导致逆变器关断角减小,严重时会发生换相失败,并提出了有效的改善方法,但其并未深入研究控制器在电压恢复过程中的控制特性,所提方法也不够完善。
鉴于此,文中以CIGRE HVDC标准测试系统为例,研究整流侧换流母线电压恢复导致逆变器换相失败机理。基于直流系统控制原理分析整流侧换流母线电压恢复过程中控制系统的动作特性,探寻诱发换相失败的原因并提出有效的抑制措施。该方法通过在PSCAD/EMTDC电磁暂态仿真软件中仿真验证。
1 换相失败的影响因素
换相结束时,退出导通的阀在反向电压作用期间内未能完全关断,或在反向电压作用期间换相过程未能结束,致使本应关断的阀在正向电压作用下重新导通,这一现象称为换相失败[14]。当关断角γ小于临界关断角γmin时,可认为换相失败[2]。考虑换相期间直流电流变化量的关断角表达式为[15]:
(1)
式中:ULI,TI,XCI,β分别为逆变侧换流母线电压、换流变压器变比、换相电抗和越前触发角;N为6脉动换流器的个数;Id为直流电流;ΔId为换相期间直流电流变化量。
由式(1)可知,γ与多种影响因素有关,这些因素可以划分为电气量(ULI,Id等)和控制量(β等)两类。目前针对换相失败的研究大多基于逆变侧交流故障展开,当故障发生时,电气量变化较控制量更快[16],ULI的跌落及Id的增大共同导致γ减小。但其忽略了整流侧换流母线电压ULR的变化,Id增大的实质是由直流线路两端电压差引起,ULR升高引起Id增大同样会导致γ减小。
2 电压恢复影响关断角的机理
2.1 电压跌落时控制系统的响应
CIGRE HVDC标准测试模型的整流侧控制方式有定最小触发角αmin控制和定电流(constant current,CC)控制,逆变侧有CC控制、定关断角(cons tant extinction angle,CEA)控制、电流偏差控制(cur rent error controller,CEC)以及低压限流控制(vol ta ge-dependent current order limiter,VDCOL)[17—18]。系统运行过程中,CEA及CC控制器取其中输出较大者投入;直流电流指令值由VDCOL或主控制级提供,取其中最小值;当直流电流的实测值小于指令值时,CEC启动,电流偏差量乘一个固定系数后作为CEC的输出。
根据ULR跌落程度的不同,整流及逆变器所采用的控制方式见表1[19]。
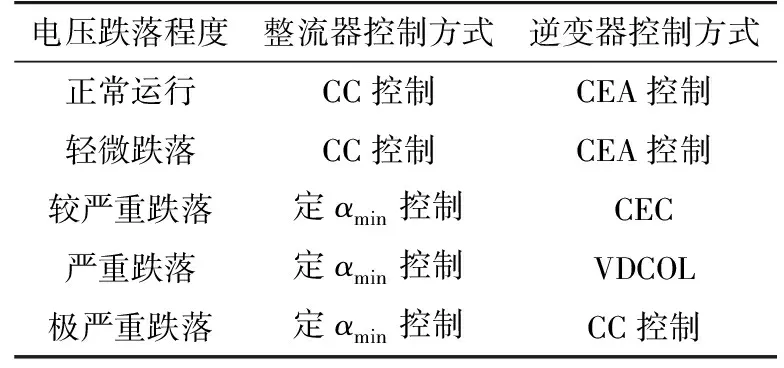
表1 CIGRE HVDC标准测试模型控制方式Table 1 Control mode of CIGRE HVDC benchmark model
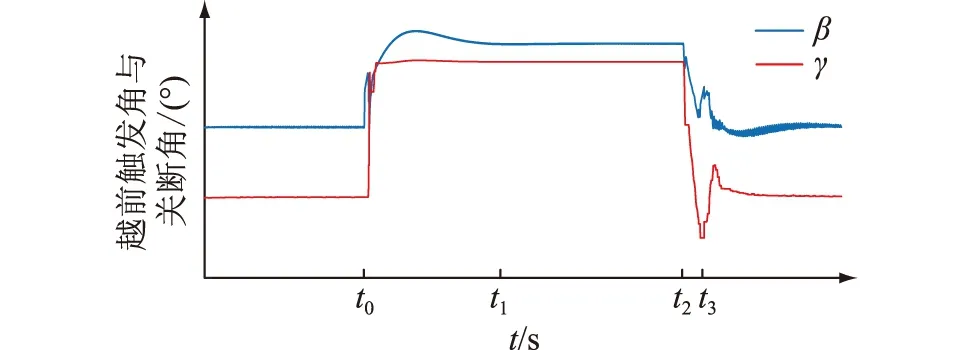
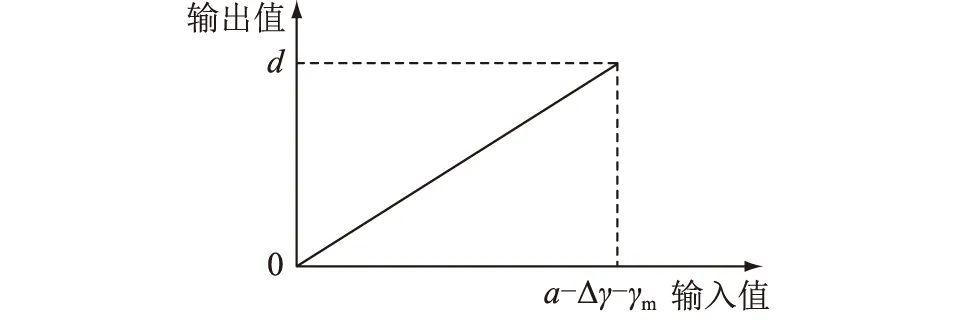
当ULR严重跌落后,整流侧定αmin控制,逆变侧VDCOL投入,此时直流电压Ud越小,电压恢复时逆变器越易发生换相失败[13]。因此,取Ud=U1(未发生换相失败)及Ud=U2(发生换相失败)2点分析ULR恢复时直流系统电气量及控制量的变化特性,其中U2 ULR跌落及恢复时,β与γ波形如图1所示。可知,β与γ因ULR在t=t0时刻的跌落而增大,在t1时刻达其稳态值,之后又因ULR在t=t2时刻的恢复而减小,γ在t3时刻达其最小值。在t2至t3时间段内,γ随β减小。在电压恢复初期,γ-γmin较大,换相裕度较大。但在电压恢复后期,随着γ逐渐减小直至达到其最小值,γ-γmin较小,换相裕度较小,结合式(1)可知,若此时Id及ΔId过大,换相所受影响较电压恢复初期更大。 图1 越前触发角与关断角波形Fig.1 Waveforms of the leading firing angle and extinction angle 当ULR恢复时,各电气量及控制量波形见图2。 图2 电压恢复时电气量及控制量波形Fig.2 Waveforms of electric quantity and control quantity during voltage recovery 图2中,ULR于t=4 s开始恢复,以逆变侧控制方式发生切换及γ达其最小值为节点将ULR恢复过程分为3个部分:Δγ为CEC输出;γerr为实测关断角偏差;eCEA为其二者之和。 由图2可知:案例1中,电压恢复时,逆变侧CC控制输出不断降低,控制方式于t=4.066 s由CC控制切换为CEA控制,此时Id指令值由主控级提供为1 p.u.,且Id=0.945 p.u.,于t=4.085 s达到1 p.u.;案例2中,逆变侧控制方式于t=4.1 s由CC控制切换为CEA控制,此时Id指令值由主控级提供为1 p.u.,且Id=0.965 p.u.,于t=4.109 s达到1 p.u.。值得注意的是,逆变侧控制方式发生切换后,案例2中γ达其最小值所用时间较案例1中更短,CEA控制输入及输出量波形如图3所示。 图3 定关断角控制输入及输出量波形Fig.3 Input and output waveforms of constant extinction angle control 案例1中:逆变侧控制方式切换为CEA控制时,γerr=1°,Δγ=8°,eCEA=9°,γ=14°。随后Δγ在t=4.086 s减小为零,历经0.02 s。 案例2中:逆变侧控制方式切换为CEA控制时,γerr=6°,Δγ=5°,eCEA=11°,γ=9°。随后Δγ在t=4.11 s减小为零,历经0.01 s。 由图3可知,逆变侧控制方式切换为CEA控制后,Δγ随Id增大而减小,而控制系统对于γ的采集配有最小值保持环节,导致γerr阶段性保持不变,从而使得eCEA减小,β减小[20]。又有β=γ+μ,μ为逆变器换相角。当ULI不变时,μ与Id正相关[21]。因此β的减小及μ随Id的增大共同导致γ减小。由于逆变侧控制方式切换为CEA控制时,案例2中Id较案例1中更大且增速更快,引起Δγ较小且迅速降低,导致γ<γmin,逆变器于4.113 s换相失败。 综上所述,ULR恢复导致逆变器换相失败时,直流系统电气量及控制量的变化特性如下: (1) 逆变侧控制方式由CC控制切换至CEA控制时,Id较大,而Id指令值由主控级提供为1 p.u.,使得Δγ较小。 (2) 逆变侧控制方式切换为CEA控制后,Id增速较快,使得Δγ迅速降低。由于控制系统对γ的采集配有最小值保持环节,使得γerr不变,故eCEA随Δγ减小,β减小。由于β=μ+γ,μ与Id正相关,故γ随β减小,γ<γmin,逆变器换相失败。 由第2章分析可知,ULR恢复时,Id的变化特性是影响逆变器换相的重要因素。Id的变化特性与逆变侧CC及CEA控制有关。 因此,可通过改善VDCOL及CEC控制特性以抑制ULR恢复时逆变器换相失败的发生。由于直接改变VDCOL及CEC的参数势必会影响逆变侧控制系统在其他工况下的响应,因此文中提出了一种在CEC动作期间对CEA输入进行补偿,以抑制ULR恢复时Id增速较快导致逆变器换相失败的方法。其结构框如图4所示。 图4 改进的定关断角控制Fig.4 Improved constant extinction angle control 图4中,蓝色虚线框内为文中所提的改进装置;a为改进装置退出阈值。CEC动作期间γ的采集配有最小值保持环节,会阶段性保持不变,而β随Δγ减小,使得γ有减小趋势。可认为γ与Δγ正相关,可用Δγ的升降表示短期内γ的变化趋势。可得到该改进装置的投入条件为: (1) 接收到整流侧的启动信号(ULR低于设置的启动阈值b); (2)γm+Δγ≤c,c为改进装置的启动阈值; 当该改进装置同时满足投入条件(1)和(2)后,将计算后得到的差值输入斜坡函数,函数关系如图5所示。 图5 改进装置中的斜坡函数关系Fig.5 Slope function diagram in improved device 图5中,d为改进装置的输出值,即补偿量。d随输入值增大,即γm+Δγ越小,补偿量越大。当γm+Δγ≥a时,退出该装置。 文中采用PSCAD/EMTDC电磁暂态仿真软件利用CIGRE HVDC标准测试模型进行仿真验证。设置t0=2 s,t2=4 s,ULR跌落后Ud=U2=0.5 p.u.。系统额定运行时,γ=15°,为能有效抑制换相失败并在改进装置切出时减少系统的波动,取a=10°。设置改进装置启动阈值b=0.6 p.u.[13]。文中以γmin=7°作为换相失败判据,预留裕度取c=8°;d=a-c=2°为改进装置最大补偿量。逆变侧控制系统新增改进装置后,CEA控制输入输出及补偿量波形如图6所示,Ud=U2。 图6 定关断角控制输入输出及补偿量波形Fig.6 Waveforms of input and output of constant extinction angle control and compensation 由图6可知,不等式γm+Δγ≤8°于4.11 s成立,随后改进装置投入,补偿值为2°,持续至4.16 s后逐步降低至0。改进装置切出后,系统在原控制系统作用下趋向额定运行点。 逆变侧控制系统改进前后换流变压器阀侧电流及γ波形如图7、8所示,Ud=U2。图7中,ida,idb,idc为Y/△接线方式换流变压器阀侧三相电流;iya,iyb,iyc为Y/Y接线方式换流变压器阀侧三相电流。由图8可知,逆变侧控制系统改进前,换流变压器阀侧电流满足换相失败特征,且γ<γmin,逆变器换相失败[7]。控制系统改进后逆变器未发生换相失败。 图7 阀侧电流波形Fig.7 Waveforms of valve-side current 图8 关断角波形Fig.8 Waveforms of extinction angle 由上述仿真可知,改进装置能够有效抑制由ULR恢复导致的逆变器换相失败。另外,由于改进装置需将整流侧的信息传输至逆变站,而直流线路一般较长,信号传输存在延时,通常耗时20~30 ms[17](当直流线路为1 000 km时)。为验证通信延时对改进装置有效性的影响,在仿真模型中增加模拟通信延时环节,延时时长取25 ms,分别对控制器改进前、控制器改进后、控制器改进后且考虑通信延时3种情况进行不同工况下的仿真测试,仿真结果表明通信延时对改进装置影响较小。 文中以CIGRE HVDC标准测试系统为例,针对整流侧换流母线电压恢复可能导致逆变器换相失败的现象,分析其机理并提出了有效的抑制措施,得出以下结论: (1) 电压恢复后期,逆变侧控制方式由定电流控制切换为定关断角控制后,电流偏差控制输出随直流电流增大而减小,而控制系统对于关断角的采集配有最小值保持环节,导致定关断角控制输出随电流偏差控制输出减小,关断角亦减小,具有换相失败风险。 (2) 电压恢复时,直流电流变化特性是诱发逆变器换相失败的重要原因。逆变侧控制方式由定电流控制切换为定关断角控制时,直流电流较大,或在随后一段时间内,直流电流增速过快是导致逆变器换相失败的2个主要因素。 (3) 针对整流侧换流母线电压恢复导致逆变器换相失败提出了一种抑制措施。在不改变原控制系统参数的基础上增加了改进装置,仿真验证了控制系统改进后的有效性。 由于文中所提改进方法需将整流侧信息传输至逆变站,若通信通道发生故障,则该方法失效。此外,该方法仅适用于实测型关断角控制,而针对预测型关断角控制的改进还需进一步研究。2.2 电压恢复导致逆变器换相失败的机理


3 控制器改进措施

4 仿真验证



5 结论
猜你喜欢
测控技术(2021年10期)2021-12-21 07:10:20
中国特种设备安全(2021年9期)2021-03-02 05:40:46
测控技术(2018年2期)2018-12-09 09:00:46
通信电源技术(2018年3期)2018-06-26 06:33:32
通信电源技术(2016年3期)2016-03-26 07:13:14
防灾减灾学报(2015年3期)2015-12-16 16:15:40
电源技术(2015年11期)2015-08-22 08:50:36
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年10期)2015-04-09 11:48:02
电测与仪表(2015年5期)2015-04-09 11:30:46