鱼雷线导机动搜索弹道使用时机研究*
2021-08-12 09:02:58王凤超于雪泳
舰船电子工程 2021年7期
王凤超 于雪泳 刘 剑
(海军潜艇学院 青岛 266199)
1 引言
区别于现行的按照相遇条件达成攻击目的的“点对点”鱼雷攻击方式,机动搜索弹道特指现代智能鱼雷搜索目标过程中采用旋回机动的方法搜索目标位置散布区域的弹道[1]。通过机动搜索能够有效扩大鱼雷搜索范围,提高对目标的发现概率。
现代智能鱼雷作为先进的线导鱼雷,具备机动搜索功能。相比鱼雷自导和直航方式,不仅极大地缩短了发射平台的作战反应时间,而且也扩大了其射击范围,提高作战效能,因而对线导方式下的机动搜索弹道研究是十分必要的。
2 现代智能鱼雷机动搜索弹道
针对目标散布扩大导致鱼雷难以发现目标的情况,现代智能鱼雷对目标散布区域可实施线导机动搜索,即将鱼雷导引到目标散布区域附近,在预先设定的航程内若未能发现目标,则按照设定的参数进行旋回搜索,通过扩大搜索域来遮盖目标散布区域,实现鱼雷“点对域”攻击构想。
线导机动搜索弹道是指在鱼雷线导工作方式下,在鱼雷发射前或鱼雷航行过程中,武器系统向鱼雷发送机动搜索弹道控制信息,当鱼雷满足机动搜索启用时机时,按照机动搜索弹道信息对目标散布区域进行旋回搜索。
根据“线导+末自导”导引方式的特点,归纳总结线导机动搜索弹道工作流程,并绘制线导机动搜索弹道示意图和线导机动搜索弹道工作流程图,分别为图1和图2。

图1 线导机动搜索弹道示意图

图2 线导机动搜索弹道工作流程图
鱼雷发射出管经自主控制航行进入线导导引航行,武器系统通过线导指令将鱼雷导引至目标散布区域附近,在线导过程中如果发现目标,则按照攻击流程组织鱼雷攻击;若到达线导断线点未发现目标,自导开机直航搜索,若发现目标则组织鱼雷攻击,若未发现目标,按照设定的参数执行机动搜索,即以期望的目标命中点(最或然点)为圆心,根据设定旋回方向和旋回半径参数搜索一周;若搜索过程中发现目标则组织鱼雷攻击,若未发现目标,则进行变速、变深、变向,同时按照设定自导方式进行直航搜索,直至发现目标或航程终了。
3 现代智能鱼雷线导和机动搜索弹道使用时机
研究现代智能鱼雷线导机动搜索弹道的使用时机,必须清楚现代智能鱼雷线导的使用时机和机动搜索弹道的使用时机。
3.1 线导使用时机
线导导引方式作为现代智能鱼雷的主要导引方式,相比鱼雷自导和直航方式,线导方式的优点非常明显,主要包括鱼雷发射前不需要掌握准确的目标运动要素,从而极大地缩短了武器系统的反应时间[2];针对目标的水声对抗措施,相比自导方式具有较强的抗干扰能力;鱼雷发射后,可以继续受到潜艇控制,便于潜艇利用掌握的目标信息,控制鱼雷导向目标;鱼雷探测到的目标信息可以传回潜艇,扩大潜艇感知范围等。
根据线导的特点,总结现代智能鱼雷线导的使用时机为在概略掌握目标运动要素的前提下(自导或直航方式不满足发射条件),鱼雷发射后需要对目标运动要素继续进行解算;为应对目标机动对抗等,鱼雷发射后需要潜艇继续控制,且线导过程中对潜艇行动不会造成不利影响或其影响在控制范围内。
鱼雷发射后需要继续控制,包括需要通过引导方法,控制鱼雷航路导向目标;需要适时改变目标和弹道的引导参数等;需要控制鱼雷自导开关机、启停车、断线等实现攻击策略的实时变更。
3.2 机动搜索使用时机
机动搜索弹道的设计初衷是对目标散布区域实施机动搜索,以期提高发现目标概率。据此,由于掌握目标运动要素存在较大误差,造成的目标散布范围过大,依靠鱼雷直航搜索方式无法遮盖目标散布区域的情况,使用现代智能鱼雷机动搜索弹道功能对目标散布区域进行机动搜索,可有效遮盖目标散布区域,提高发现目标概率,如图3为远距离、大误差条件下,机动搜索与直航搜索命中目标概率对比图,虚线代表机动搜索命中概率,实线代表直航命中概率,从图中可以看出,随着射距的增大,机动搜索的命中概率始终高于直航搜索方式的命中概率。
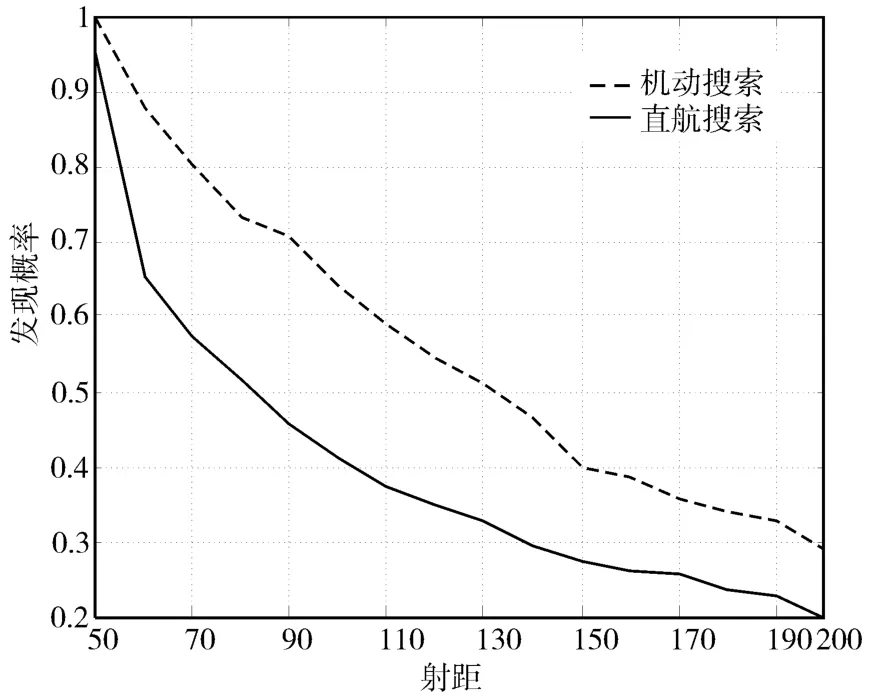
图3 机动搜索与直航搜索命中概率对比图
潜艇掌握的目标运动要素存在较大误差,是指潜艇通过判断、解算或绘算等方法,掌握的目标运动要素存在较大误差,或是通过外部目标信息,得到目标位置、速度、航向等信息,但这些信息有较大误差。由于远距离、大误差条件下,造成目标散布范围扩大,不能满足按相遇原理发射鱼雷攻击目标的要求,如图4所示。
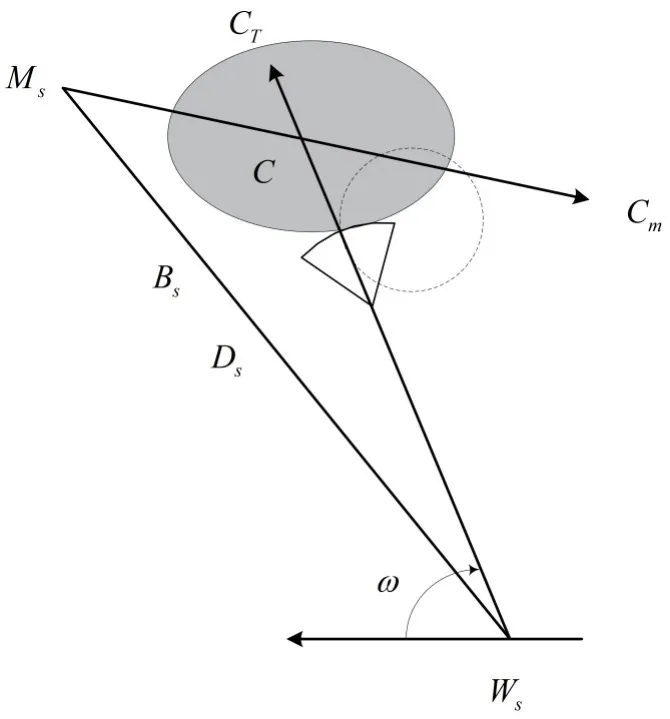
图4 机动搜索攻击示意图
若除上述信息之外,还有其他信息(如目标方位信息),或者可能出现新的信息(如再次发现目标或再次接收到新的目标指示信息),且潜艇可以利用这些信息控制鱼雷导向目标(如利用目标方位使用线导导引鱼雷)时,就应当充分利用这些信息,而不是用机动搜索弹道方式。所以,现代智能鱼雷在线导未断线时,不管有无机动搜索弹道参数设定,均不执行机动搜索弹道方案。
4 现代智能鱼雷线导机动搜索弹道使用时机
在现代智能鱼雷线导使用时机和机动搜索弹道使用时机的基础上,综合分析,确定线导机动搜索弹道的使用时机如下。
1)潜艇自行跟踪目标,概略掌握目标运动要素情况下,使用现代智能鱼雷线导方式攻击目标,鱼雷线导过程中解算目标运动要素不满意,且线导有意外断线的可能,应设定机动搜索弹道方案,当意外断线时,鱼雷按机动搜索弹道方案搜索目标位置散布区域;
2)潜艇自行跟踪目标,概略掌握目标运动要素情况下,使用现代智能鱼雷线导方式攻击目标,鱼雷线导过程中解算目标运动要素不满意,,且线导过程存在主动断线的可能,如潜艇规避敌方攻击需要采取大幅度机动、需要用线导舷再次发射武器时、指挥员无暇线导或者认为继续线导无意义时,应设定机动搜索弹道方案,当主动断线时,鱼雷按机动搜索弹道方案搜索目标位置散布区域;
3)潜艇未与目标直接接触,通过外部接收目标信息(包括目标位置、速度、航向和各参数的误差)[3],潜艇使用现代智能鱼雷线导方式攻击目标,在鱼雷发射之前,应设定机动搜索弹道参数,当线导意外断线或鱼雷航程接近旋回搜索航程潜艇指挥员主动断线时,鱼雷按机动搜索弹道方案搜索目标位置散布区域;
4)潜艇未与目标直接接触,通过外部接收目标信息,潜艇使用现代智能鱼雷线导方式攻击目标,在鱼雷发射之前,设定了机动搜索弹道参数,在线导过程中,再次接收到新的目标指示信息,应立即根据新的目标信息,修改机动搜索弹道参数,当线导意外断线或鱼雷航程接近旋回搜索航程潜艇指挥员主动断线时,鱼雷按机动搜索弹道方案搜索目标位置散布区域。
5 结语
当前对现代智能鱼雷线导机动搜索弹道作战使用研究尚属空白,研究现代智能鱼雷线导机动搜索弹道作战使用问题具有很强的针对性和实用性。本文仅对线导机动搜索弹道作战使用时机进行了研究,针对机动搜索弹道作战作战使用还需在目标位置散布、作战构想、战术流程上作进一步的研究。
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
小学生作文(低年级适用)(2022年5期)2022-05-26 07:55:52
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
通信电源技术(2018年5期)2018-08-23 01:17:12
海峡姐妹(2017年12期)2018-01-31 02:12:24
大众电视(蓝天下)(2017年7期)2017-10-19 02:03:05
琴童(2017年1期)2017-02-18 15:39:53
运动(2016年7期)2016-12-01 06:34:17
电力工程技术(2014年5期)2014-03-20 14:19:34