用于汽车ADAS系统测试的软目标车研究进展
2021-08-11 02:23李文礼李建波石晓辉
汽车工程学报 2021年4期
李文礼,李建波,石晓辉,王 戡
(1.重庆理工大学 车辆工程学院,重庆 400054;2.重庆车辆检测研究院 汽车主动安全测试技术重庆市工业和信息化重点实验室,重庆 401122)
近几年,由于汽车ADAS技术发展迅速[1],对汽车ADAS的功能测试需求也不断增长。基于对安全性和测试效率的考虑,一般不使用实车作为目标车辆参与测试,而是需要一种满足车辆传感器识别特性、动态特性高、碰撞时不损伤被试车辆,具有轨迹跟随功能且测试效率高的替代目标车辆的测试设备,由于替代目标车(Surrogate Vehicles,SV)的碰撞主体部分通常由气囊或泡沫等软体组成,因此也被称为软目标车。
自2014年欧盟新车安全评鉴协会(European New Car Assessment Programme,Euro NCAP)将自动紧急制动(Autonomous Emergency Braking,AEB)系统的测试规程列入汽车整体评级中至今,其测试方法和要求不断细化,最新协议分别对测试过程中的天气状况、周边环境、被测车辆的轮胎状况、AEB系统设置等做了详细的规定[2],这对软目标车的性能提出了更高的要求。2018年,中国新车评价规程(C-NCAP)将AEB系统的测试纳入整车评级后,我国对软目标车的需求逐年增加,但是目前成熟的软目标车产业技术被国外科技公司垄断销售,价格昂贵,国内在这方面的研究处于起步状态,有必要对软目标车技术进行研发。本文介绍软目标车的关键技术和研究进展,分析乘用车的电磁散射特性、视觉及光学特性,并着重介绍了乘用车的电磁散射特性中重要的衡量指标——RCS及其测试方法和研究进展,研究软目标车对于毫米波雷达、摄像头和激光雷达在传感器识别方面的设计要求。
1 软目标车发展历程
2013年6 月,Euro NCAP制订的AEB系统测试规程中规定了软目标车选用标准及对AEB测试场景的要求。文献[3]介绍了通用德国汽车协会(Allgemeiner Deutscher Automobile-Club,ADAC)为Euro NCAP提供的软目标车——Euro NCAP 目标车辆(Euro NCAP Vehicle Target,EVT)(图1)。它是由聚酯、聚乙烯、聚己二酰己二胺、氯丁橡胶和尼龙组成的类似汽车尾部及部分车身的气球结构,外部尺寸为宽1600 mm,高1350 mm。气球结构由一层聚氯乙烯(PVC)覆盖,上面印有汽车的后窗、部分侧窗、后灯和车牌等部件的图像。软目标车(气球车)的颜色选用了易被传感器识别的银色,车体上喷绘了真实大众途安汽车图像来模拟汽车的后窗和轮胎,在一定程度上实现了车辆尾部的3D视图。利用同真实汽车尾部雷达响应相同的角反射器来模拟汽车雷达特性,同时还使用了吸波泡沫和反光箔覆盖干扰软目标车雷达响应特征的背板和保险杠。软目标车的动力系统由导航车提供,使用长达10 m的折叠式导轨连接。在发生撞击时,导轨能够按照预定轨道滑动,以此吸收碰撞产生的能量和冲击。

图1 Euro NCAP 2013年使用的软目标车EVT
2015年6月,英国Moshon Data公司[4]生产的软目标车在Euro NCAP协议要求的基础上做出了部分改良,在软目标车的底部加装了吸收雷达波的泡沫,为提升测试效率,在软目标车上安装了拉绳和拉杆等能提升软目标车安装速度的装置。2018年5月,Euro NCAP制订的AEB系统测试协议提高了对软目标车的测试要求[5]。图2a为美国DRI公司生产的的软目标车,其最高速度可达55 km/h以上,在各传感器,包括毫米波雷达、摄像头、激光雷达、光子混频设备(Photonic Mixer Device,PMD)和红外探测器(Infrared Detector,IR)识别特性方面皆仿制了典型的白色掀背式乘用车,动力系统为车体底部的移动平台车(图2b),图2c为泡沫板材质的软目标车内部结构,图2d为软目标车和被测车辆发生碰撞时的情形。移动平台车一般由质量较轻的钛合金制成,当被试车辆越上碾压移动平台车时,平台车内置的悬架系统受压力作用缩进平台内部,此时,由移动平台壳体承受重力,保护了移动平台的悬架系统和轮子。由于平台的高度较低且具有坡度,被试车辆会很容易越上平台,这样就保护了被试车辆不与软目标车金属结构碰撞。移动平台车内置的GPS天线和可编程的控制装置,能够实现良好的路径跟踪能力。2018年8月,NORD与其团队[6]分别分析了5家移动平台制造商以及3家软目标车制造商的产品,通过对比软目标车发现,虽然其内部材质略有不同(充气气球和覆盖有反光材料的泡沫板),但其传感器响应特性并无明显区别。该团队还通过对Euro NCAP使用的全新EVT和经过多次碰撞后的EVT进行对比研究,旨在测试软目标车经过多次撞击后的光学和几何特性的变化,并通过优化测试方法来消除或减少这种变化带来的误差[7]。

图2 DRI公司生产的软目标车
2019年,Euro NCAP规定AEB系统测试用软目标车应具有3D视觉外观以及实车的雷达、红外线和LiDAR响应特征[2],必须使用符合规定的雷达反射和红外线反射材料,同时反射材料不能干扰安装在移动平台车内的GPS发出的信号,必要时需使用雷达吸收材料(Radar Absorbing Material,RAM)来消除杂波。软目标车的3维规格协议由Euro NCAP、美国高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)和美国公路安全保险协会(Insurance Institute for Highway Safety,IIHS)联合制定,该协议旨在使软目标车尽量在任何水平方向和任何冲突场景下都能模拟真实车辆的特性,同时将被测车辆损伤的可能性和被测车辆驾驶员受伤害的风险降到最低。
2 软目标车设计关键技术
根据软目标车的用途和Euro NCAP的AEB系统测试规程,总结软目标车设计涉及到的关键技术包括[8-11]:
(1)软目标车的首要特征就是在测试车辆发生碰撞时,尽量降低被试车辆的损伤或不受损伤。这就要求软目标车车体部分材质为轻质材料或吸能材料,软目标车底部动力装置保证能使高速行驶的测试汽车越上平台而不损伤其轮胎、悬挂装置和底盘。
(2)为保证测试过程的准确性和可信度,软目标车在视觉和雷达等传感器识别特性上应尽量保证与实车一致。这就要求研发人员了解典型车辆型号与外部特征,掌握实车和各种材料的电磁散射特性和其他传感器识别特性。
(3)为保证能较真实地还原各种测试场景和工况,要求软目标车有良好的动态性能和轨迹跟踪能力。动态性能指移动平台车搭载假体车身部分后仍能保持较高的运动能力,在道路附着系数未知的情况下能够按需求加、减速,以及软目标车能够与远程基站实时通讯的能力;而轨迹跟踪能力则是指软目标车可以按既定路径运动的能力,其参考路径曲线与时间和空间皆相关。
(4)为降低测试成本、保证测试效率,还要求软目标车有极强的自我保护能力和快速修复能力。
3 雷达散射截面及测试方法
车载毫米波雷达是ADAS系统中检测目标的核心传感器之一,由于其在恶劣的天气条件下具有抗干扰性强和成本低的特点,在智能汽车中得到广泛应用。毫米波雷达主要根据电磁波的散射特性来探测和识别道路交通中障碍目标的相对位置和目标类别。雷达散射截面(Radar Cross Section,RCS)是度量目标在雷达波照射下所产生回波强度的物理量,取决于目标车辆的物理和几何参数,以及入射雷达波的相关参数,通常用10倍的RCS对数值表示[12],单位是dBm2。
软目标车RCS的良好表征依赖于目标和杂波的正确统计和描述,BULLER等[13]对25辆实车的雷达响应进行了测量和表征,并通过极大似然估计将实测RCS拟合为伽马分布(Gamma Distribution),优化了传统的RCS表征方法。由于车载毫米波雷达通常安装在车辆保险杠附近,离地面300 ~800 mm。而且雷达垂直面的有效波束范围很窄,所以在垂直面上从不同角度、不同高度观察被测物体时,必须保证无线电波反射结果一致。因此,BAI Jie等[14]提出了一种高度均匀的管状标准物标代替行人进行雷达识别测试,严格对标车载雷达特性,分析了替代物的材料特性、尺寸、形状、倾斜角度等方面对RCS的影响,评价了各种测试物标对电磁波的反射和吸收特性,以此达到在多种条件下更准确地模拟目标RCS的目的,对标准物标的研究有重大意义。
(3)必须保证水封排气内水面的高度。水位过高,炉内压力增加,水封有可能不能顺利排气。水位过低,水封密封效果降低,一旦无水,后果非常严重。
SILBERLING等[15]提出一种典型车辆和软目标车雷达响应特征测量与分析的方法,并将该方法应用于8辆小型乘用车的雷达特性测试,以便更好地了解具有代表性的乘用车的雷达特征。该研究基于BULLER等[16]的研究成果,通过博世LRR3远程雷达传感器分别从5个角度和3种距离进行测量,试验结果显示,由于侧视方向提供了最大的反射面且该反射面基本上都与传感器垂直,所以车辆侧视方向上的RCS数值最大,而车辆的前视、后视方向上的RCS数值要小一些,为软目标车仿实车雷达散射特性设计提供了数据基础。
地面反射是汽车目标RCS表征中测量不确定性的主要影响因素。车载雷达更趋向于关注近距离(相比于远场条件)的RCS,同时,由于目标上的多个散射中心相互影响,目标特性与距离更相关[17-18]。KARLSSON等[19]研究了地面反射对在平坦的室外条件下进行的真实车辆或软目标车RCS测量的影响。
TOSS等[20]提出了一种利用汽车目标RCS进行反向投影,从而获取雷达反射率空间剖面的方法,该剖面轮廓可以评估目标的多个散射中心,对3D软目标车与实车在雷达等传感器特性方面的研究有重要意义。由于目标的散射中心通常由底层雷达数据和合成孔径雷达成像算法得出,而在汽车测试中,底层雷达数据很难获取,所以合成孔径雷达成像较为困难。针对这种现象,该团队提出了一种利用位置和RCS数据来表征任意角度雷达目标的方法并进行测量。在由AstaZero试验场提供的直径约为200 m的平坦沥青路面上完成了该项测试,为了获得目标车辆的全方位雷达属性,使用搭载全球导航卫星系统(Global Navigation Satellite System,GNSS)的可移动小车围绕固定目标车辆转动(图3),而不是场地性要求更高的汽车转台。
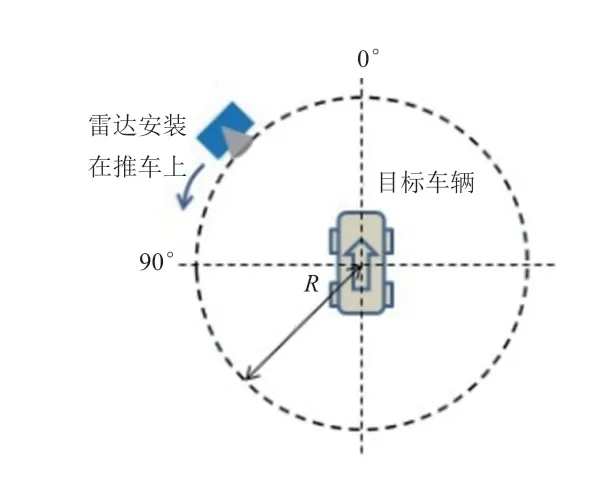
图3 RCS测试场景
3.1 RCS测量原理
RCS计算公式是基于雷达的工作原理推导而来的,由雷达方程式可推出RCS表达式如下[21]:

式中:Pr、Pt分别为接收机和发射机的功率,W;Gr、Gt分别为接收天线和发射天线的增益;rr、rt分别为接收天线到目标和发射天线到目标的距离,m;λ为雷达工作波长,m。由式(1)可知,如果能通过准确的测量得到上述参数,那么RCS即可计算得出,但是在实际测试过程中有些参数很难精确获得。通常目标物的RCS值采用一个RCS已知的标准金属球或角反射器进行对比标定[22]。RCS测量系统主要包括雷达信号收发模块和数据处理模块。雷达信号收发模块用于产生和发射波形信号,并通过接收机接收回波信号;数据处理模块主要通过操控转台处理得到目标在不同角度下的RCS数值[23-24]。
3.2 RCS测试场景
RCS的定义是基于平面波照射下目标各向同性散射的概念,即假设雷达探测距离R是无穷大的,以此来消除探测距离R对RCS数值的影响。但在实际测试过程中,其入射波和反射波近似为点源发出的球面波,这就导致当目标车辆与雷达的距离较近时,目标物表面的干涉作用会使RCS数值发生明显变化。因此,通常采用标准远场条件和近场测量条件。
标准远场条件:目标物与测试点间的距离R需满足[25]:

式中:D为目标物的尺寸,m。标准远场条件下目标车辆的RCS仅与目标物的几何形状、材料及入射波频率、角度、极化相关,而与探测器无关,此时非平面波照射模型是最大的误差来源[26]。
近场测量条件:当目标与测试点间的距离R不满足式(2)时,即产生近场雷达散射问题[27]。由于目标的近场散射特性与雷达天线波束、雷达波调制方式及探测距离密切相关,所以该条件下的雷达散射问题就相对较复杂[28]。由于菲涅尔区(Fresnal Range,)中场的相对角分布与距离相关,平均场强在不同距离保持不变,所以近场测量一般在此区域内进行[29]。而在进行目标车辆的近场RCS测量时,只需将目标车辆置于固定距离的转台上(图4),用确定参数的雷达对目标车辆进行360°的扫频测量即可获得目标车辆的近场散射数据[30-32]。

图4 软目标车在RCS测试转台上
在进行室外测试时,为了避免场外杂波对目标物的影响,通常会对测试场周围提出要求,例如在国际标准化组织(International Organization for Standardization,ISO)发布的标准中,要求在测试场可观测区内无其他建筑物、金属或其他会干扰指定雷达测试目标车辆的强雷达反射物,路面由柏油或混凝土完全覆盖并保持干燥,图5为ISO中的室外测试环境要求[33]。

图5 ISO建议的RCS室外测试环境
近场测量还可以在微波暗室内进行[34],相较于传统的室外测试条件,它具有背景电平低、受气候环境影响小、可全天候测试、工作频率宽等优点[35-36]。在微波暗室里进行测量可以尽量消除其他物体反射的电波,提高相对远场条件的测试精度。YAMADA等[37]提出了一种基于行人模拟的测试系统,该系统实现了在36 dB动态范围内可测,可观测到(-30)~(+5) dBm2范围内的反射波强度。为获得更精确的RCS,也可在微波暗室内对车辆进行测量(图6)。
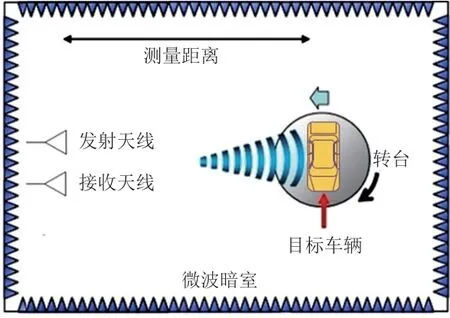
图6 汽车RCS室内测试方案
3.3 RCS的标定
在测量目标RCS时,先使用一个RCS已知的标准金属球或角反射器对传感器进行标定(图7)。图8为金属球RCS随金属球的周长和入射波长之比Ka变化的关系曲线,当Ka>10时,金属球的RCS值趋于稳定并无限接近理论值πa2,所以标定过程多用标准金属球反射器[38]。

图7 RCS的标定目标物

图8 金属球RCS随Ka变化的关系曲线

式中:a为金属球半径,m。
RCS的标定通常在标准远场条件下进行[39],图9为RCS标定时的场景示意图,图中H为毫米波雷达通常安装在车辆上的高度,而雷达与定标体之间的距离R0需满足式(2),雷达传感器在能够检测到对象的最远距离开始向定标体逼近至R0处,测量得到定标体的RCS值。通常使用与金属球反射器雷达响应差别较大的角反射器评估雷达测量的质量。
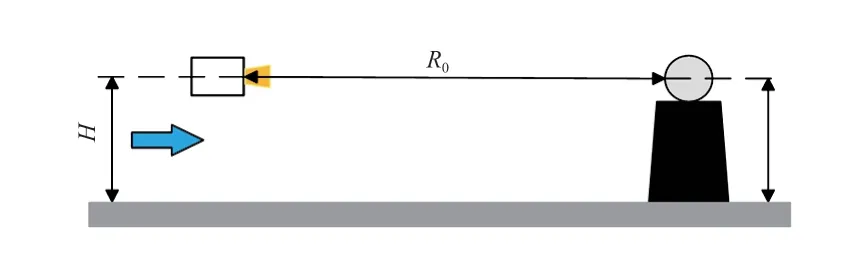
图9 RCS测试标定场景
假设标准金属球反射器的RCS值为σ0,此时雷达接收天线收到金属球反射的功率为P0;目标车的RCS值为σ1,在各试验条件未发生改变的情况下,雷达接收天线收到目标车反射的功率为P1,则有[19]:

图10为目标RCS惯用的表征形式,图中数据为8辆不同乘用车在各角度下的RCS值[33],乘用车的RCS峰值出现在±90°处,即车辆的侧视方向上。
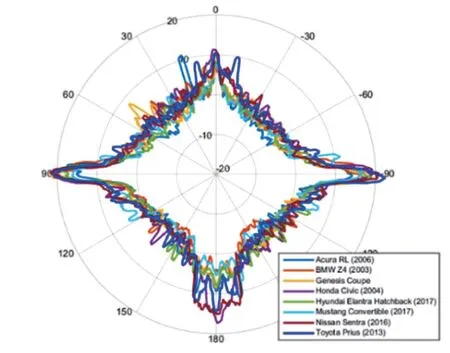
图10 RCS表征形式
4 其他传感器识别特性设计
车辆ADAS系统的传感器感知系统除使用毫米波雷达以外还有多种传感器辅助识别,其中较有代表性的是摄像头和激光雷达,因此软目标车的设计也应满足这些传感器识别特性。
4.1 摄像头视觉特性设计
摄像头系统从周围环境捕捉图像,并处理这些数据以检测和区分目标对象[40],车载摄像头通常安装在后视镜和挡风玻璃之间[41]。软目标车为了满足摄像头视觉识别特性[3],把拍摄的汽车真实照片在软目标车蒙皮上打印出来,利用阴影模拟技术和抗反射材料,可为摄像头传感器提供较为真实的汽车图像。为给摄像头传感器提供更好的识别效果,可在汽车真实照片的基础上增加反光材料和真实的车牌,此外,选择银白色外观还可以使摄像头系统在白天更易识别。为了减小不必要部分造成摄像头系统的误识别,可用淡灰色的皮革覆盖在轮胎底部,以遮盖底部的支承和牵引系统,如图11所示[3]。

图11 摄像头效果图
4.2 激光雷达反射特性设计
激光雷达(LiDAR)通过发射和接收激光脉冲来测量到物体的距离[42],通常三维激光雷达置于汽车顶部[43],可实时绘制目标车辆周边的三维空间地图和其他车辆的速度信息[44]。激光雷达与毫米波雷达工作原理大致相同,不同之处在于其发射的是光脉冲而不是电磁波,激光雷达使用波长在近红外光(Near Infrared,NIR)范围内的激光或LED光源,探测距离可达200 m,但在恶劣的环境条件(如烈日、雾、雨、灰尘和喷雾)下其探测性能会下降[45]。激光雷达与摄像头同属光学传感器,但摄像头依赖于可见光,而激光雷达则更依赖于目标表面的红外反射率(Infrared Reflectivity,IR)[6],所以软目标车上需配备足够的反光部件,然而过大的反射会使激光雷达接收器饱和而导致故障,因此,测试用软目标车的反射特性需与实物匹配。文献[46]的研究结果表明,设计的目标假人可见皮肤表面部分的红外反射率与真人皮肤的相似度在40%~60%之间,即可保证探测精度,文献[6]中所测试的软目标车经过多次碰撞后的IR(波长在900 nm附近)稳定在70%左右。
5 结论
软目标车是汽车ADAS系统测试不可缺少的设备,它提高了被试智能车辆测试过程中的安全性和测试试验效率。本文重点阐述了软目标车对毫米波雷达传感器的响应特征——RCS分布特征,以及其测量和数据处理方法,为软目标车的开发和使用提供了参考依据。目前对软目标车的研究主要集中在各类传感器识别表现及其动力系统的动态控制性能和路径跟踪方面,随着车路协同技术的发展,汽车ADAS系统的测试必将对软目标车提出车联网通讯技术和复杂工况的轨迹跟踪能力等新的使用需求。同时,为了满足新的车载传感器和识别技术测试需求,软目标车的性能也会不断地更新和发展。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
军民两用技术与产品(2022年5期)2022-06-28
茶道(2022年3期)2022-04-27
汽车工程师(2021年12期)2022-01-18
中学生数理化·高一版(2021年11期)2021-09-05
科普童话·百科探秘(2020年5期)2020-09-14
CHIP新电脑(2017年6期)2017-06-19
小学生导刊(高年级)(2016年11期)2016-11-14
网络与信息(2009年6期)2009-07-31
小哥白尼·军事科学画报(2009年4期)2009-05-11