基于智能体状态的虚假信息注入攻击下多智能体系统一致性跟踪
2021-08-09 01:52潘登峰吴治海
中国新通信 2021年10期
关键词:一致性
潘登峰 吴治海
【摘要】 本文针对基于智能体状态的虚假信息注入攻击,本文设计了自适应容错控制协议以使得多智能体系统能在虚假信息注入攻击下实现一致性。本文首先采用径向基神经网络来近似多智能体系统中未知的非线性部分,并设计了相应的自适应律来调整神经网络的参数。然后类似这些自适应律设计了新的自适应律来近似虚假信息注入攻击的参数,并基于这些近似值设计了容错控制协议控制协议。最后利用Lyapunov稳定性定理验证了此容错控制协议的收敛性并利用Matlab数值仿真案例验证了此容错控制协议的有效性。
【关键词】 多智能体系统 虚假信息注入攻击 一致性 容错控制
引言:
多智能体系统指由一组可以交互信息的智能体组成的自治系统,通过其内部的信息交互,多智能体系统可以完成单个智能体难以完成或是无法完成的任务。在针对多智能体系统的一致性问题的研究中,研究者们通常假设多智能体系统处于理想的环境中[1-3],即多智能体系统内部信息交互不会受到外部干扰。然而,多智能体系统的分布式特性及其内部信息交互复杂性使其对于通信网络的要求变得越来越高。虽然无线通信技术的发展为多智能体系统提供了高速率和低延迟的通信网络,但这些通信网络也使多智能体系统暴露在了网络攻击的威胁中。现有针对网络攻击下多智能体系统的一致性研究中,主要研究的网络攻击有三种,即拒绝服务攻击[4-5],重放攻击[5-6]和虚假信息注入攻击。拒绝服务攻击通过向智能体发送大量无意义的数据,使智能体忙于处理这些无意义的数据,从而让智能体无法处理来自其他智能体的正常信息,最终导致智能体之间的通信中断。重放攻击则通过不断地重复智能体接收到的过期信息,让智能体无法接收来自其他智能体的最新信息。上述的这两种的攻击都是通过向智能体发送无意义的信息从而达到孤立某个或多个智能体的目的,并最终让多智能体系统性能下降或无法实现一致性。虚假信息注入攻击最早是在智能电网领域被提出的[7],正如其名,它特指攻击者将恶意虚假信息添加到正确的传感器数据中的攻击,从而破坏数据的完整性。然而,随着网络技术的发展,网络攻击的发起者逐渐向其他领域发动虚假信息注入攻击,如医疗,金融以及政府机关等。因此,虚假信息注入攻击成为了一个在设计系统时不得不考虑的问题。在多智能体系统的研究领域中,这类会修改智能体之间传输的数据的网络攻击会降低多智能体系统的性能,甚至会破坏整个多智能体系统的稳定性。从建模的角度来讲,虽然虚假信息注入攻击和噪声的数学模型非常相似,但是相对于噪声而言,虚假信息注入攻击更加的有攻击性。因为虚假信息注入攻击的发起者可以通过收集多智能体运行过程中所产生的数据来制定攻击策略,使得多智能体系统中针对噪声的削弱机制失效。例如,文献[8]中指出,如果将所注入虚假信息的统计特性保持和原控制信号序列一致,则攻击信号可以绕过卡尔曼滤波器;此外,文献[9]中的攻击者通过辨识智能体的系统参数,并使用这些参数发起基于智能体模型的攻击来绕过其中的H∞噪声衰减机制。因此,研究多智能体系统在虚假信息注入攻击下的安全性问题,并找到使得在虚假信息注入攻击下的多智能体系统可以正常工作的控制策略非常有必要。
一、问题描述
考虑由一个领导者和N个追随者组成的多智能体系统。其中,领导者的非线性动力学模型描述为
二、收敛性分析
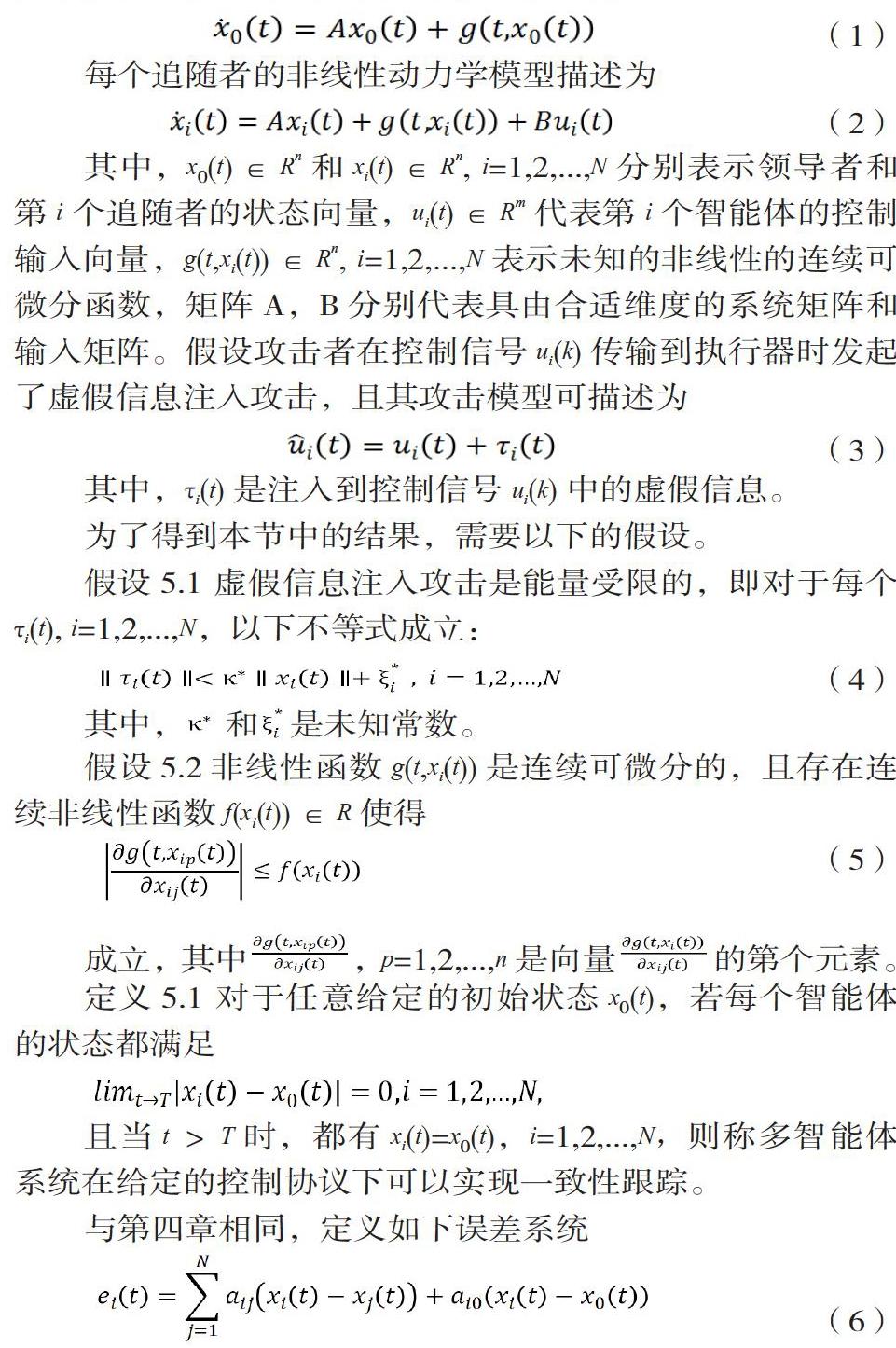
定理1 对于一个受到满足假设5.1的虚假信息注入攻击的由个领导者(5.1)和N个跟随者(5.2)构成的多智能体系统,使用控制协议(5.8)可以使其渐近地实现一致性。
注意到随着神经网络训练过程的进行,和会逐渐收敛至0。因此,由(4.42)可得0。即误差系统(5.7)会渐近的收敛至,也就是说,由一个领导者(5.1)和N个跟随者(5.2)组成的多智能体系统能够实现一致性跟踪。证毕。
三、数值仿真
本节将通过一个数值仿真例子来说明控制协议(8)的有效性。
考虑一个有1个领导者和6个跟随者组成的多智能体系统,其通信拓扑图如图1所示。
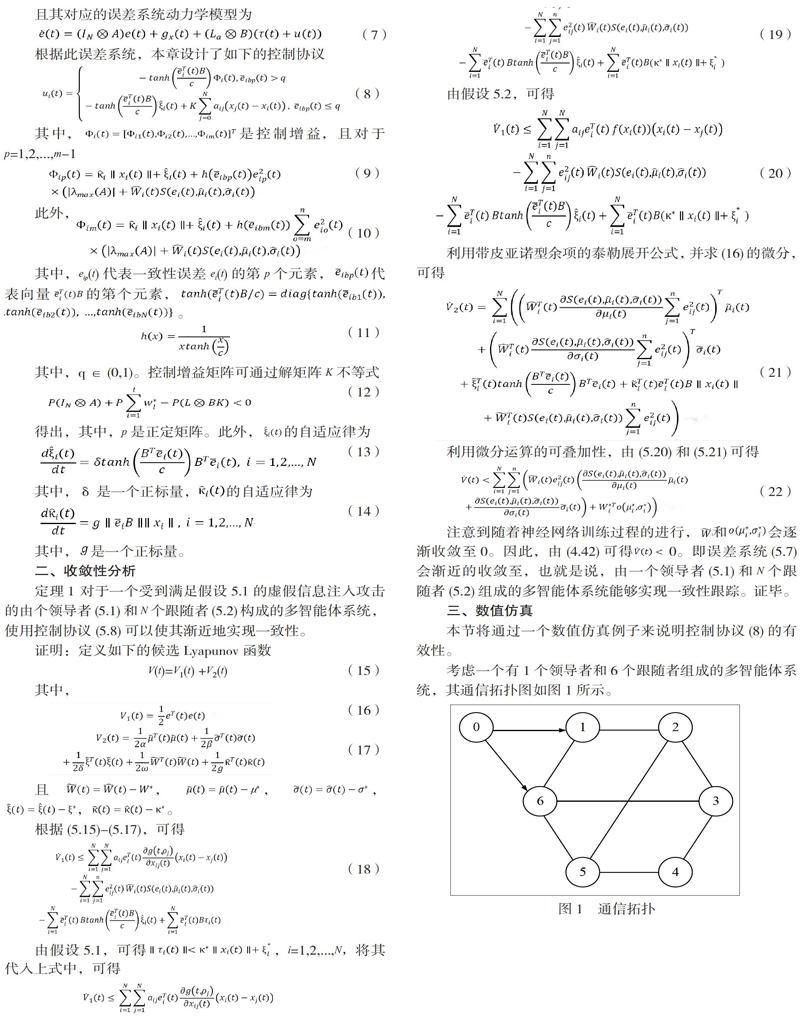
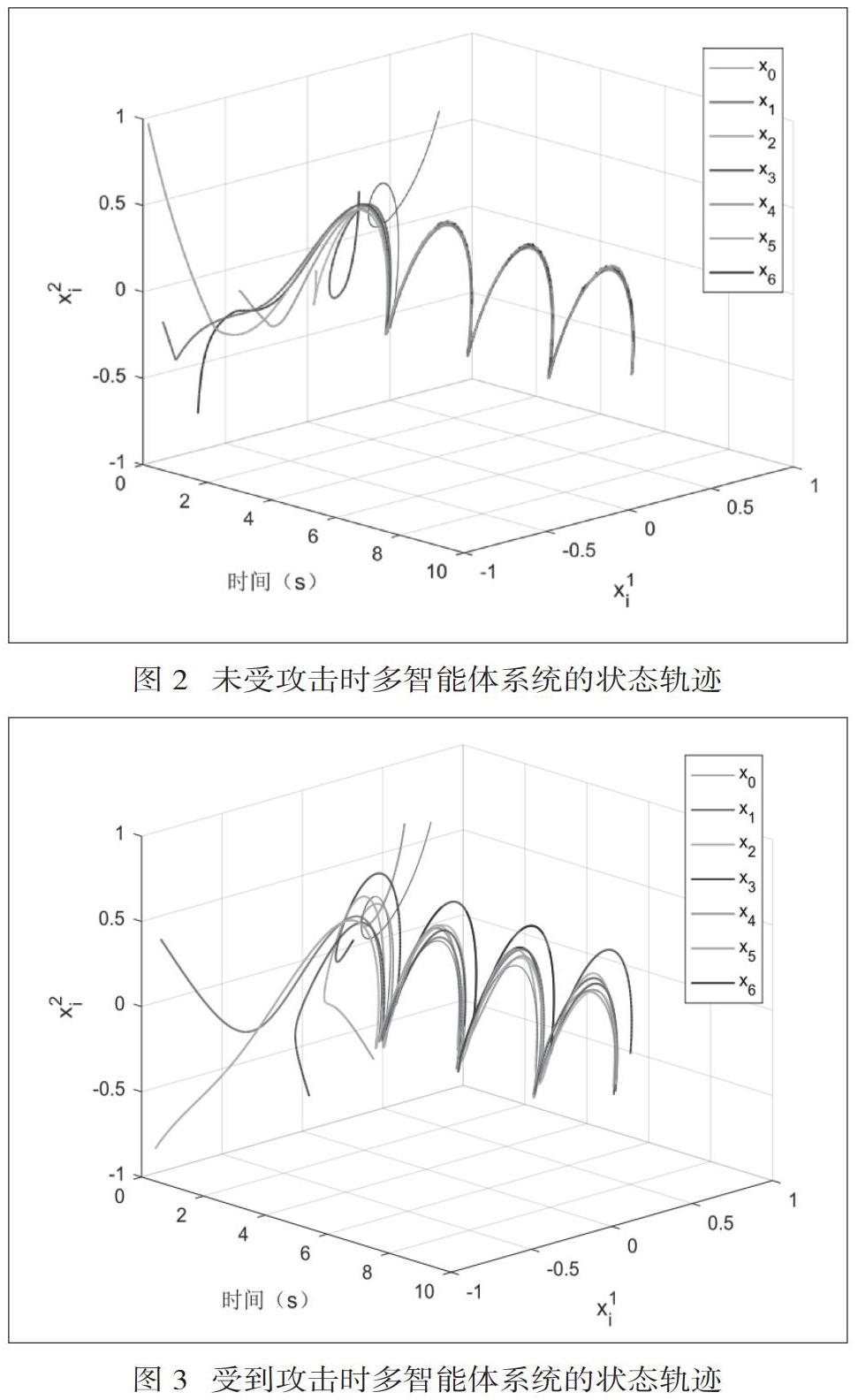
为了说明多智能体未受虚假信息注入攻击时多智能体系统的状态轨迹,图2给出了在未受虚假信息注入攻击时多智能体系统的状态轨迹。此外,为了展示本章所设计的控制协议的有效性,在同样的假设下,图3中给出了受到虚假信息注入攻击且没有采取相应的防御措施时的多智能体系统的状态轨迹。
最后,为了展示本文中控制协议的有效性,在同样的假设下,图4给出了使用本章中设计的协议(8)时受到虚假信息注入攻击的多智能体系统的状态轨迹。可以看出,本章中设计的控制协议在应对基于智能体状态的虚假信息注入攻击时是有效的。
五、结束语
本章主要研究了在基于智能体状态的虚假信息注入攻击下的多智能体系统的一致性跟踪问题。
首先,类似上一章,本章中利用径向基神经网络处理了多智能体系统动力学模型中的未知非线性部分。
其次,类似于为径向基神经网络设计的自适应算法,为虚假信息注入攻击设计了相應的近似算法。
另外,根据这些近似结果设计了新颖的自适应容错控制协议,使得所有的跟随者在受到基于智能体状态的虚假信息注入攻击时也能渐近地跟踪领导者的状态。
随后,利用Lyapunov稳定性理论,从理论上验证了所设计的协议的收敛性。
最后,利用Matlab的仿真结果来说明了虚假信息注入攻击的危害以及本章设计的协议的有效性。
参 考 文 献
[1] Sun F, Guan Z. Finite-time consensus for leader-following second-order multi-agent system [J]. International Journal of Systems Science, 2013, 44(4): 727-738.
[2] Hong H, Yu W, Wen G, et al. Distributed robust fixed-time consensus for nonlinear and disturbed multiagent systems [J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(99): 1464-1473.
[3] Zhu M, Martínez S. Discrete-time dynamic average consensus [J]. Automatica, 2010, 46(2): 322-329.
[4] Khazraei A, Kebriaei H, Salmasi F R. Replay attack detection in a multi agent system using stability analysis and loss effective watermarking [C]. 2017 American Control Conference (ACC). Seattle, WA, USA: IEEE, 2017: 4778-4783.
[5] Mo Y, Sinopoli B. Secure control against replay attacks [C]. 2009 47th annual Allerton conference on communication, control, and computing (Allerton). Monticello, IL, USA: IEEE, 2009: 911-918.
[6] Ahmed M, Pathan A. False data injection attack (FDIA): an overview and new metrics for fair evaluation of its countermeasure [J]. Complex Adaptive Systems Modeling, 2020, 8(1): 1-14.
[7] Guo Z, Shi D, Hohansson K H, et al. Optimal linear cyber-attack on remote state estimation [J]. IEEE Transactions on Control of Network Systems, 2017, 4(1): 4-13.
[8] Mustafa A, Modares H. Attack analysis for discrete-time distributed multi-agent systems [C]. 2019 57th Annual Allerton Conference on Communication, Control, and Computing (Allerton). Monticello, IL, USA: IEEE, 2019: 230-237.
猜你喜欢
考试周刊(2022年24期)2022-07-22
计算技术与自动化(2022年2期)2022-07-04
福建基础教育研究(2020年1期)2020-05-28
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
决策探索(2018年3期)2018-03-10
现代经济信息(2016年8期)2016-12-26
商(2016年28期)2016-10-27
科技视界(2016年6期)2016-07-12
科技视界(2016年8期)2016-04-05
科技视界(2016年3期)2016-02-26