基于超级电容的双向DC-DC 变换器控制研究
2021-08-05 09:16杨轶成丁明进王响成董春光刘春松
电源学报 2021年4期
杨轶成,丁明进,王响成,董春光,刘春松
(国电南京自动化股份有限公司,南京 210003)
城市轨道交通的站间距离较短、站数量多,因而列车起动和制动频繁,目前车辆已普遍采取再生电制动。再生电制动时牵引电机运行在发电模式,向牵引网回馈再生能量,此部分能量若不能被线上其他车辆消耗就会导致母线电压抬升[1]。为了控制设备的安全,目前再生制动能量利用方案主要分为耗散式、能馈式[2-4]和储能式[5-11]3 种。耗散式主要由制动电阻将制动能量转化为热能。电阻制动控制方式虽然简单,但这种方式不仅造成能量的浪费,大量热能也会抬升隧道温度,增加地铁通风散热装置的能耗、地下站内空调系统负荷以及运营费用。因此,制动能量合理回收利用能够实现能量的合理循环利用,节约地铁运营成本,对于响应国家节能减排的号召以及建设绿色城市轨道交通有着非常积极的作用。能馈式再生制动能量吸收是通过电力电子变换装置将直流侧的再生能量回馈至交流电网,供其他站内设备使用,此方案可以避免采用电阻制动导致的隧道温升问题,且实现了环保节能,但是需要新建具有能量回馈功能的供电系统,或对整个供电系统进行改造,但直流网与交流网存在耦合关系,系统复杂[4]。储能式再生制动能量吸收方式采用在直流牵引网侧增加DC-DC 双向变换器及直流储能元件,吸收多余的再生制动能量,抑制直流牵引网电压抬升;同时在车辆运行过程中释放能量,给牵引网提供电压支撑,避免牵引网电压波动过大。超级电容具有功率密度高的特点,很适合于这种能量频繁波动充、放电场合[5-6]。
我国城市轨道交通绝大部分都是采用1 500 V直流牵引网,因此对双向DC-DC 变换器的性能提出了较高的要求,即:需满足耐高压、耐大电流。文献[9]对各种适用于轨道交通双向DC-DC 变换器的拓扑进行了性能优劣对比分析;文献[10]针对1 500 V 轨道交通车辆再生制动能量吸收系统提出了由4个额定电压为375 V 的超级电容储能模块串联的储能系统功率变换方案,但仅对电路拓扑进行了原理分析和设计,未针对系统的能量管理控制进行深入研究;文献[7]提出了基于MMC 双向DC-DC 变换器BDC(bidirectional DC-DC converter)的超级电容储能系统,该方案可以进一步降低单个DC-DC 变换器的电压等级及容量,通过多组串联的方式实现1 500 V 电压接入;文献[8]提出了基于组合型双向DC-DC 变换器的超级电容储能系统,将多相交错Buck/Boost BDC 拓扑与基于半桥高压侧级联BDC拓扑进行组合的储能拓扑,降低了在高压、大功率双向变换场合对功率器件电流和电压的应力需求,具有很好的工程应用价值,但只考虑了电压应力均衡的均压控制及防超级电容的过充过放,没有考虑各组超级电容容差对系统能量利用率的影响。
在文献[8]的基础上,本文结合实际工程产品开发对可靠性和成本的综合考虑,采用三相交错Buck/Boost BDC 与输入侧基于串联的拓扑方案,输出侧分别连接2 组超级电容,每组超级电容工作在700 V 以下。介绍了基于超级电容储能的输入串联三相交错并联双向DC-DC 变换器的工作原理,采用电压外环电流内环的典型双闭环控制策略,重点针对该拓扑结构及电容差异性的影响,提出了优化的超级电容荷电状态SOC(state of charge)管理策略及装置均压控制策略,同时根据工程应用需求对系统的能量管理策略进行了改进。最后通过仿真及开发的2 MW 工程样机验证了所提控制策略的有效性。
1 输入串联三相交错并联BDC 储能系统工作原理
基于超级电容的输入串联三相交错并联BDC储能系统拓扑如图1 所示。图中:C1、C2为超级电容柜的等效电容,RC1、RC2为超级电容柜的等效内阻;输入侧由2 组Buck/Boost BDC 串联构成,并与地铁1 500 V 直流牵引网连接,每个串联变换器由3 组全控半桥Buck/Boost BDC 交错并联后输出汇总,再经过低内阻回路的滤波电容C11、C22滤除高次谐波电流,分别与超级电容柜连接。超级电容柜和大功率BDC 是采用分柜体设计,中间通过电缆连接,由于超级电容内阻较大,变换器的输出到超级电容的线路内阻远大于滤波电容C11、C22支路内阻,因此BDC 的输出采用LC 滤波即可很好地滤除IGBT 开关频率产生的高次谐波。输入侧2 组DC-DC 变换器串联,通过控制可以实现输入侧上下2 组变换器各自均压,以降低开关管的电压应力,各变换器的输出分别连接2 组独立的超级电容柜,避免超级电容模组串联数量过多,降低电容模组均压控制难度。
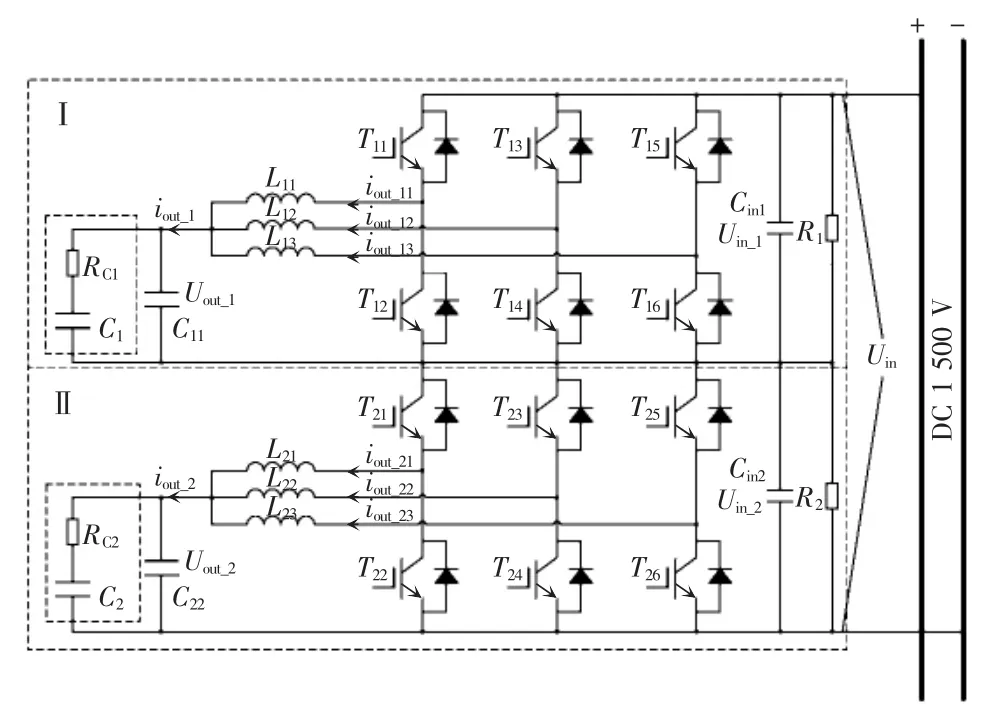
图1 基于超级电容的输入串联三相并联BDC 储能系统拓扑Fig.1 Topology of input series three-phase parallel BDC energy storage system based on super capacitor
地铁列车在制动时,超级电容储能系统处于充电状态,BDC 工作在Buck 模式,上下2 组变换器的上管Tij(i=1,2;j=1,3,5)、下管Tij(i=1,2;j=2,4,6)的反并联续流二极管与输出电感Lij(i=1,2;j=1,2,3)构成Buck 变换器,将列车制动回馈到直流牵引网的多余能量转移到超级电容中存储,以抑制直流牵引网压的上升。
列车在正常牵引状态时,若超级电容有多余电量,控制超级电容储能系统处于放电状态,BDC 工作在Boost 模式,下管Tij(i=1,2;j=2,4,6)、上管Tij(i=1,2;j=1,3,5)的反并联续流二极管与电感Lij(i=1,2;j=1,2,3)构成Boost 变换器,将超级电容存储的多余电能释放到1 500 V 直流牵引网。
上下串联的2 组变换器由三相交错DC-DC 变换器并联,采用载波移相调制技术,使得输出的等效开关频率为单组的3 倍,可以大幅减少输出滤波电感的体积及超级电容充放电电流的纹波[12]。
2 控制策略
基于超级电容储能的地铁再生制动能量吸收利用BDC 采用高压输入侧两组串联,上下输出2组独立接口分别连接超级电容储能单元。在该系统中要实现地铁刹车制动能量吸收,列车牵引能量释放支撑牵引网压即实现能量在牵引网和超级电容储能单元之间的双向流动、串联变换器各自工作在安全电压范围内并根据牵引网压切换运行状态。因此整体采取电流内环电压外环及均压均流的控制策略。
2.1 电流控制及多支路均流控制
串联的2 组BDC 拓扑及电流控制完全一致,因此只需对单组三相交错并联BDC 进行建模分析。其单组的简化模型如图2 所示。图中:L1i(i=1,2,3)为各支路输出电感;R1i(i=1,2,3)为各支路寄生等效电阻;iout_1i(i=1,2,3)为各支路输出电流,参考方向见图2;uin为输入电压;uout为输出电压;各支路上管的开通时间为对应的占空比d1i(i=1,2,3),则可得各支路状态方程为


图2 三支路并联BDC 拓扑Fig.2 Topology of three-branch parallel BDC
对式(1)进行拉氏变换可得

由式(2)可知,通过控制d1i(i=1,2,3),即可实现各支路电流的控制。对于并联的多支路相当于单独的DC-DC 变换器,其uin、uout完全一样。因此理想情况下,假设输出滤波电感及寄生参数完全一致的情况下,其占空比相同即可保证并联的各个支路电流均流。但在实际的应用中,由于电感加工误差及功率器件开关损耗的误差,导致滤波回路中RL 参数不相等,因此需要单独对各支路占空比进行微调控制才能确保各支路电流均衡。则式(2)改写为

式中:ΔR1i为各支路阻抗偏差量;Δd1i为各支路占空比微调控制量;各L1i和各R1i(i=1,2,3)分别相等。
BDC 输出电流和均流控制器都采用PI 控制器,则由式(3)可得其控制方程为

式中:kpi、kii为电流环PI 控制器参数;kpi_avg、kii_avg为均流环PI 控制器参数。
根据式(4)可得电流环的控制框图如图3 所示。整个电流环的控制由3 部分构成:总输出电流PI控制器、3 个支路均流PI 控制器及输出端电压前馈。总输出电流控制器的反馈由3 个支路电流iout_1i(i=1,2,3)求和再取平均得到,均流控制器采用总输出电流控制器的反馈作为给定,分别与各支路的电流做差,经过PI 调节输出等效占空比微调控制量,同时通过输出电压前馈,避免初始输出占空比从零开始,导致输出电流超调过大和调节时间过长。电流PI 控制器的参数计算参见文献[8],此处不再赘述。
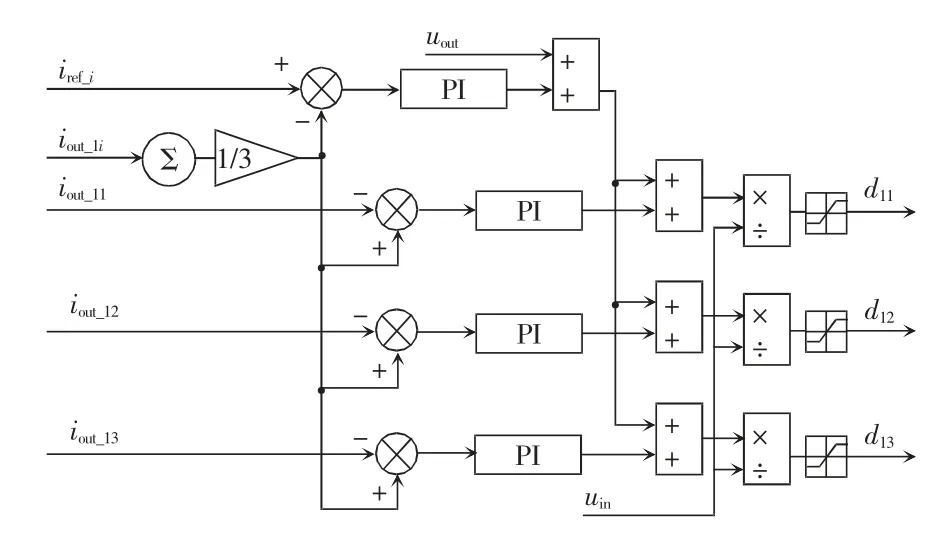
图3 BDC 电流控制策略Fig.3 Current control strategy for BDC
2.2 电压控制
根据地铁再生制动能量利用的特点,2 组输入串联输出独立BDC 的电压控制主要包括2 个方面:一方面是根据1 500 V 直流牵引网电压的波动来控制其工作模式,即工作在充电模式或放电模式;另一方面是根据该拓扑结构的特点,需要控制串联的2 组变换器输入侧均压,确保设备安全。依据上述的控制思路,其控制逻辑框图如图4 所示,由2 个电压控制器构成,Uref-Buck为充电模式牵引网电压控制目标,Uref-Boost为放电模式牵引网电压控制目标,iref为总电压外环输出电流给定量,iref-Equal为均压环控制器输出电流调节量。图4(a)为牵引网电压控制器,即根据牵引网电压的实时值,确定其工作在充电或放电状态,并根据不同的工作状态给定不同的牵引网电压控制目标,设充电状态给定控制目标为Uref-Buck,放电状态给定控制目标为Uref-Boost,则该控制器的输出iref同时作为2 组变换器电流内环的给定目标。同时,为了更好地保护设备,在控制器的输出侧增加了限幅环节,确保设备工作在安全区域内而不会过流。另外为了保证2 组串联的变换器工作在安全的电压范围内,需对其进行输入均压控制,其控制框图如图4(b)所示,由于只有2 组变换器串联,因此其均压控制器的目标给定值即为输入总电压的一半,同时只需对一组变换器输入侧电压均压调节控制,其控制器的输出iref_Equal即为均压微调电流。将iref_Equal取反即可作为另外一组变换器的均压微调量,由此可使均压控制器更简单。
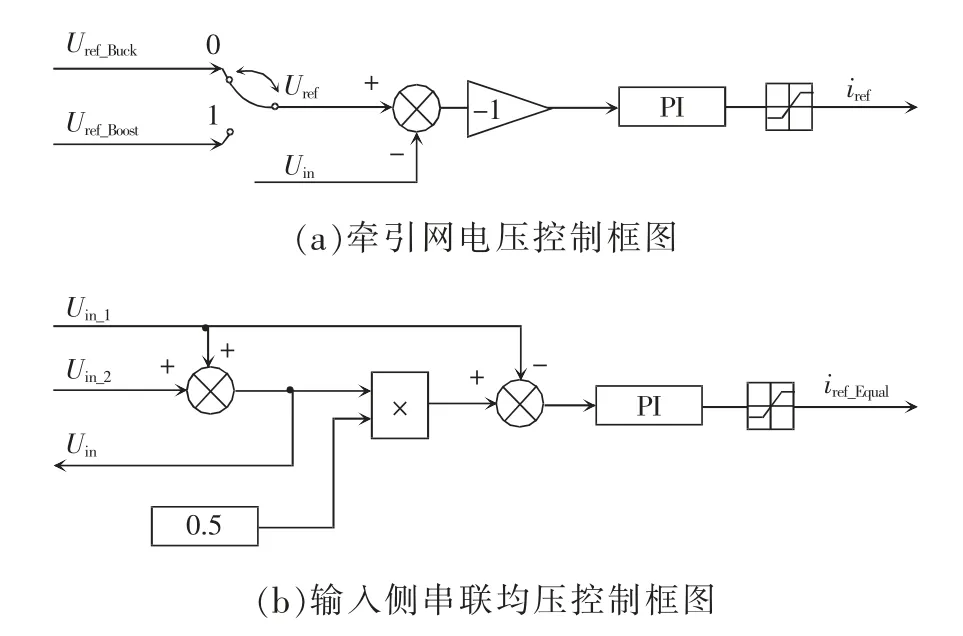
图4 两组输入串联输出独立BDC 电压外环控制策略Fig.4 Voltage outer-loop control strategy for two sets of input series output independent BDC
3 基于超级电容的储能系统能量控制策略
基于超级电容储能的地铁再生制动能量吸收利用系统通常是以稳定直流牵引网的电压为控制目标,同时结合超级电容内阻大、该BDC 拓扑结构的特殊性,设计合适的能量管理控制策略,才能更好地发挥其性能。因此,针对该能量控制策略的优化设计主要有两方面:一是稳定牵引网电压相关阈值的优化选取,二是超级电容能量管理控制策略的优化。
3.1 牵引网能量控制策略
地铁再生制动能量吸收利用系统直流侧直接与直流牵引网连接,因此一般根据牵引网直流电压制定相关充放电逻辑,即:当牵引网电压大于阈值Uthr_Buck,设备启动,工作于充电模式;当牵引网电压小于Uthr_Boost,设备启动,工作于放电模式。该策略实现简单,但当牵引网电压波动就会出现设备误判、误启动的情况,因此需要针对该问题制定更加合理可靠的能量管理启停控制策略。通过引入交流电网实时电压eabc为启停阈值扰动变量,使启停阈值和控制目标值跟随交流电网电压的波动而变化,从而避免设备的误判、误动现象,其具体控制框图如图5 所示。首先根据牵引变压器前端的三相交流电压eabc计算出其电压有效值,再综合电压PT 采样变比及牵引变压器的变比折算出直流牵引网对应的空载电压Udc_0。由Udc_0叠加充电启动调节量ΔUc得到充电启动阈值Uthr_Buck,Udc_0减去放电启动调节量ΔUd得到放电启动阈值Uthr_Boost,一般工程应用中ΔUc、ΔUd取30~50 V。此外,对计算获得的空载电压进行限幅处理,避免电网故障而导致过低无效的启动阈值。同时充放电状态下的稳压目标值根据工程应用一般和相应启动阈值相差20~30 V,确保有一定的滞环区间,避免反复启停。
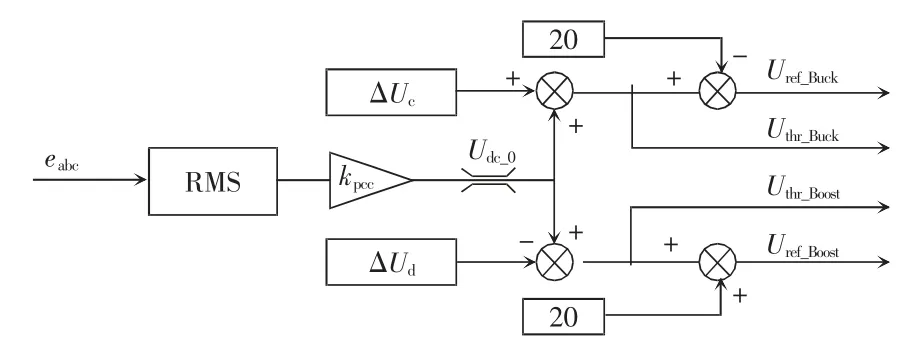
图5 充放电启动阈值自适应调整控制策略Fig.5 Adaptive adjustment control strategy of charging and discharging start threshold
3.2 超级电容的能量控制策略
超级电容的储存能量Wsc与端电压Usc的关系[8]以及超级电容的SOC 计算公式分别为
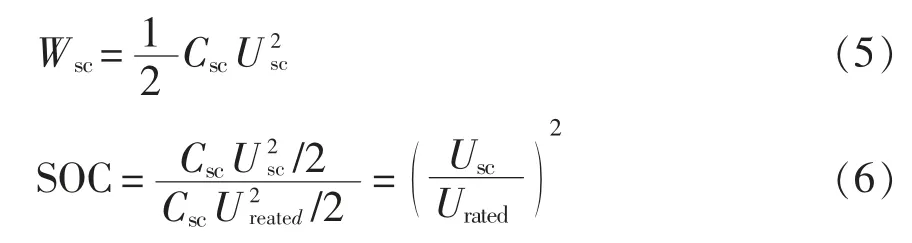
式中:Csc为超级电容柜等效电容;Urated为超级电容的额定电压。
因此,一般在判断超级电容的SOC 时,直接采用Usc与Urated进行标定[5],当SOC 低于或高于一定阈值时,立即直接闭锁停止工作。但由于超级电容的内阻较大,在大功率充放电过程中计算的SOC误差较大,会导致出现设备频繁启停。此外,该拓扑结构中,只要有一组超级电容柜的SOC 达到了设定的闭锁阈值,上下2 组变换器都需闭锁停止工作。而这2 组超级电容在制造和使用过程中必然会存在容量偏差,就会出现木桶短板效应,使其储存能力没有被充发利用。针对以上问题,在考虑设备安全的前提下,设计了更适合的超级电容能量控制策略,具体如图6 所示,整体由3 部分构成:防超级电容SOC 误判控制部分,如图6(a)所示;输出端2组超级电容均压控制部分,如图6(b)所示;输入2组串联变换器的均压控制部分,如图6(c)所示。再结合图4(a)的总电压控制环,可得到2 组变换器最终的电流给定为

图6(a)中,在充电状态下,超级电容的电压限定值选择0 状态,以UC_max为控制目标;同理在放电状态下,超级电容的电压限定值选择1 状态,以UC_min为控制目标。为了避免超级电容充放电过程中由于其内阻大而导致的误判,设置滞环调节电压ΔU,由超级电容最大允许电压UC_max或最小允许电压UC_min与超级电容实时电压Uout_1、Uout_2做差,除以ΔU,再取绝对值并进行平均值滤波平滑控制抖动,得到电流给定限幅倍数,同时对该值限制在0~1,即正常工况不限制电流,可将最大电流限制到0。一般ΔU 取50 V 以内,即当超级电容充放电到设定目标值的差值内,该控制器的输出小于1 起调节作用,对电流给定逐渐限幅,直到电压超级电容充满或放空到设定值,电流限幅输出到0。可以看出,采用该控制策略,不论是充电还是放电状态都适用,不需要进行控制环路的切换,且实现简单可靠。
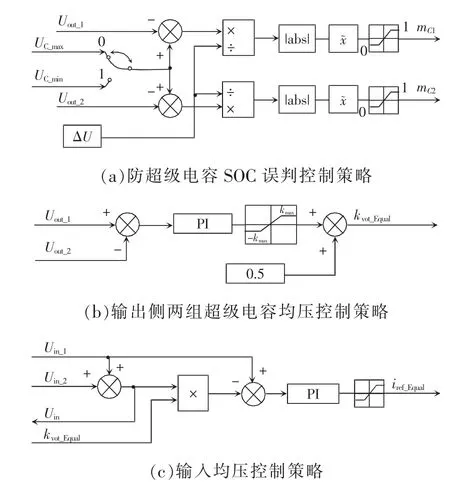
图6 超级电容能量优化控制策略拓扑Fig.6 Topology of super capacitor energy optimization control strategy
图6(b)中,采用PI 调节器实现输出超级电容的均压,避免因为超级电容参数差异而导致的短板效应。由于输入侧与输出端能量守恒,因此在实现控制输出端均压的同时,必然会导致输入侧不均压,此时输入侧就不能简单地按照2 组均压为控制目标。将图6(b)超级电容侧均压控制器的输出kvot_Equal作为输入均压控制调整系数,如图6(c)所示,通过kvot_Equal控制输入侧Uin_1、Uin_2的均压关系。理想情况下,超级电容参数完全一致,以相同的电流充放电,则Uout_1和Uout_2相等,kvot_Equal为0.5,即和常规的如图4(b)所示的输入均压控制一致,控制输入电压Uin_1等于Uin_2。而在超级电容参数存在差异的情况下,由于控制超级电容端电压Uout_1和Uout_2相等,但超级电容的充放电功率不一样,此时需要对输入电压Uin_1和Uin_2进行差异化控制。同时考虑设备本身的安全,输入侧的不均压程度需要控制在10%以内,可通过对输出均压控制器的输出kvot_Equal进行限幅实现。实际工程应用中,2 组超级电容的参数差异性可以控制在10%以内,因此输入电压的不均压程度完全可以满足设备安全运行工况要求。
3.3 系统总体控制
综上所述,基于超级电容储能的输入串联三支路交错并联BDC 的控制分为5 部分,即:输入牵引网压电压外环、输出超级电容均压控制、防超级电容SOC 误判控制、输入侧2 组串联变换器的均压控制、2 组变换器输出电流及三并联支路的均流控制。系统完整控制框图如图7 所示。
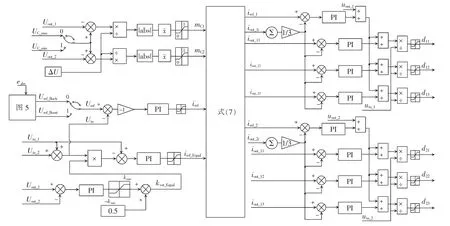
图7 系统控制框图Fig.7 Control block diagram of system
4 仿真和实验验证
4.1 仿真分析
为验证上述方法的有效性,根据拟试制样机的参数在Matlab/Sumlink 环境下搭建了轨道交通超级电容储能系统的BDC 模型并进行仿真。样机及仿真的参数如表1 所示。

表1 仿真及测试样机的主要参数Tab.1 Main parameters of simulation and test prototype
仿真中,直流输入侧采用一个受控电流源模拟牵引功率的波动。理想条件下2 组超级电容完全相等,变换器输入电容相等。模拟放电工况,Uref-Boost=1 660 V,直流输入牵引网受控电流源给定为904 A,其输入、输出电压波形如图8 所示。模拟充电工况,Uref-Buck=1 720 V,直流输入牵引网受控电流源给定为872 A,即保持直流牵引网侧功率恒定为1.5 MW。其输入、输出电压、电流波形如图9 所示。由图8 和图9 可见,理想情况下,采用本文所提的系统均压均流控制策略可保证输入、输出均压及输出均流。

图8 超级电容放电工况稳态仿真波形Fig.8 Steady-state simulation waveforms under super capacitor discharging conditions
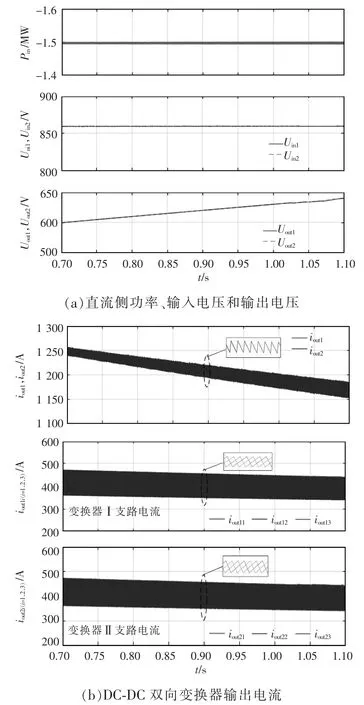
图9 超级电容充电工况稳态仿真波形Fig.9 Steady-state simulation waveforms under super capacitor charging conditions
为了验证图6(a)所提超级电容SOC 误判控制策略的有效性,以充电工况为例,其中ΔU 取30 V,UC_max取700 V,其仿真结果如图10 所示。图中,Uout1、Uout2以1 000 V 为基准进行了标幺化。装置初始时以恒定电流给超级电容充电,当超级电容端口电压达到670 V 时,控制器调节量mC1、mC2退饱和,起调节作用,自动限制充电电流,超级电容端口电压越接近UC_max,调节量mC1、mC2越小,确保不会因超级电容内阻过大而误判提前退出充电状态。控制实现简单,且不需要进行输入、输出电压控制环路的切换。

图10 理想条件下超级电容SOC 控制策略仿真波形Fig.10 Simulation wimulation waveforms under super capacitor SOC control strategy and ideal conditions
针对实际工程应用中,超级电容参数的差异性对系统影响,进行仿真分析。假定2 组超级电容的容量偏差为10%,超级电容初始电压为440 V,最大允许电压为700 V。输入侧采用常规均压控制策略的仿真结果如图11 所示,由图可以看出,输入电压均压,但由于第1 组超级电容的容量小10%,因此被更快地充满到700 V。为了保证设备的安全,任意一组超级电容的电压达到最大允许值时,装置停止工作,整个单次充电周期内充入到2 组超级电容的总电量为0.904 kW•h。
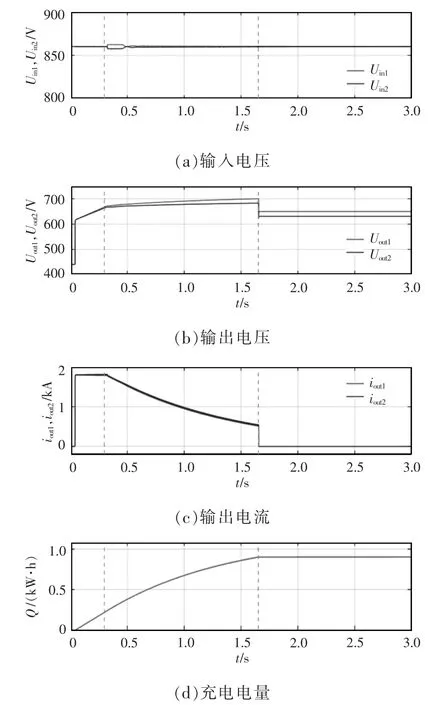
图11 超级电容存在差异下常规SOC 控制策略仿真波形Fig.11 Simulation waveforms under conventional SOC control strategy with capacitance difference in super capacitors
在完全相同的工况下,采用本文所提超级电容能量优化控制策略,其仿真结果如图12 所示。由图可见,整个充电过程分为4 个阶段:0~t1阶段,mC1、mC2恒为1,变换器控制超级电容端电压相等,同时按照最大电流给超级电容恒流充电,输入电压不相等且不均压程度逐渐增大;t1~t2阶段,超级电容端电压达到670 V,防过充或过放,mC1、mC2起作用,限制充电速率,同样控制超级电容端电压相等,输入侧不均压程度继续增大,直到输入电压单侧达到最大允许限幅值;t2~t3阶段,由于单组输入电压已达到最大限幅值,则控制输入电压的差值不再继续扩大,超级电容端电压也不再完全相等,直到某组超级电容端电压先达到最大允许值,装置停止工作,由于此阶段充电电流已经较小,因此超级电容端电压的不平衡度较小,基本可以忽略;t3时刻之后,装置处于热待机状态,输入侧通过均压电阻调节一段时间后恢复均压。整个单次充电周期内可充入到2 组超级电容的总电量为1.159 kW•h,相比常规控制方法,可用电量提升了约28.2%。因此,在系统工程应用中可减少因考虑超级电容柜容量差异而增配的预留容量,降低工程建设成本。
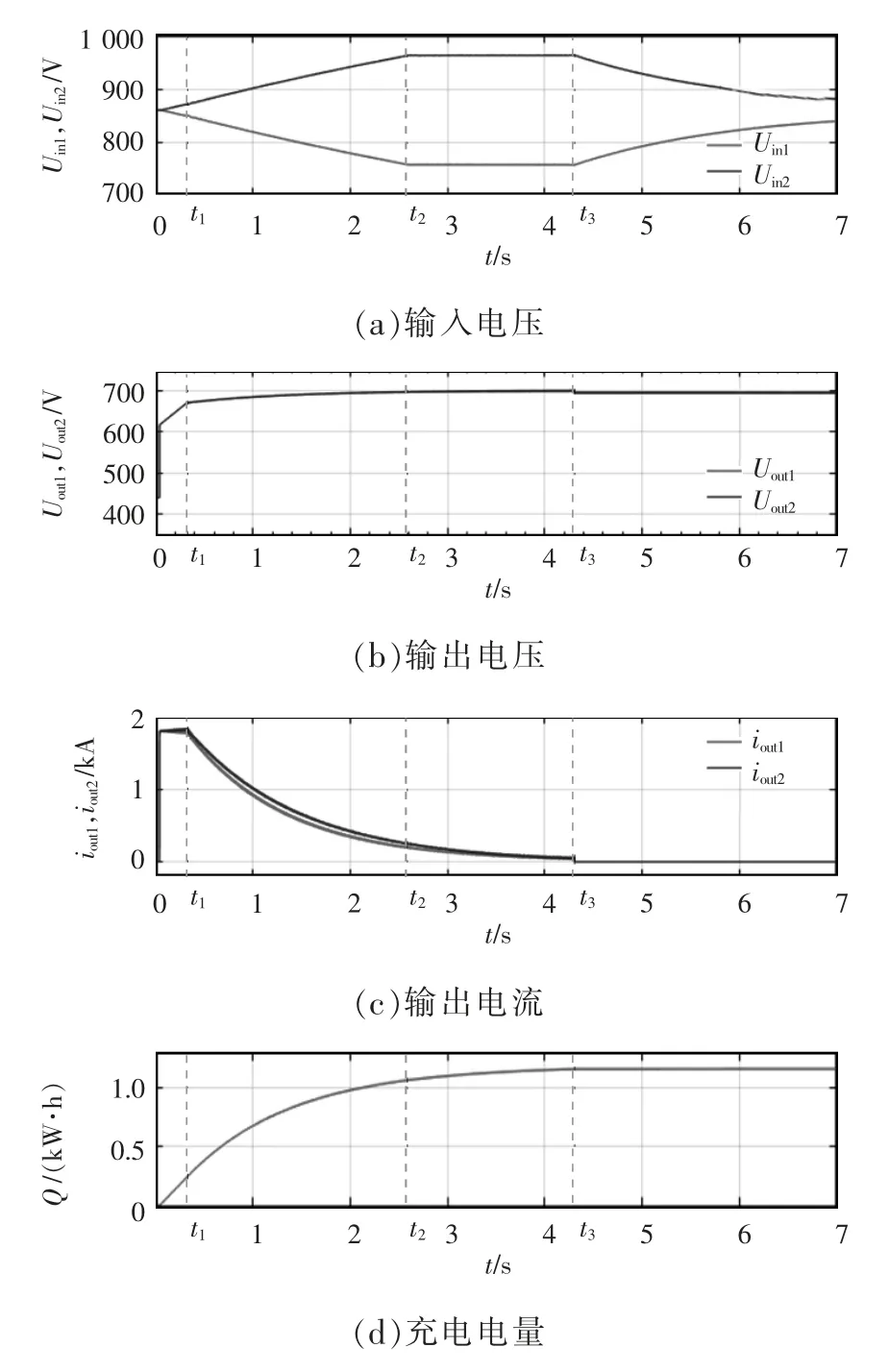
图12 2 组超级电容存在差异下改进SOC 控制策略仿真波形Fig.12 Simulation waveforms under improved SOC control strategy with capacitance difference in two groups of super capacitors
4.2 实验验证
为进一步验证以上控制策略的可行性,在开发的峰值功率为2 MW 的BDC 样机上进行测试验证,实验平台的接线图如图13 所示。直流侧电压由一套二重化串联峰值功率2 MW 的四象限PWM 变换器模拟1 500 V 牵引网电压波动。双向DC-DC 变换器的硬件及控制参数和仿真模型一致,其中IGBT 采用英飞凌1 400 A/1 700 V 的FF1400R 17IP4 半桥模块。储能单元超级电容柜2 面,其中:超级电容模组采用国产某品牌,单个额定电容为62.5 F,额定电压为144 V,直流内阻约为16 mΩ;由6 个模组串联组柜,等效额定电压为864 V,等效容值为10.4 F,等效内阻约为96 mΩ,实际使用中电容柜最高电压限定在720 V 以内。控制系统采用DSP+FPGA 的架构,其中DSP 采用TI 公司最新双核TMS320F28377D,FPGA 采 用ALTERA 公司的EP4C E15F17C8N,IGBT的PWM 控制信号采用光纤传输。

图13 实验测试平台接线图Fig.13 Wiring diagram of experimental test platform
由于受前端电网容量的限制,实验测试中采用恒流方式给超级电容充放电,且将各并联支路的最大给定充电电流限制为100 A。超级电容的充放电电压工作区间为400~700 V。其实验波形如图14和图15 所示,图14 为充、放电过程中输出超级电容端电压和各支路电流波形,图15 为2 组输入电压和各支路电流波形。可以看出,装置首先工作在充电模式,在充电开始阶段,各支路以恒定的电流给超级电容充电,当超级电容端电压达到设定阈值,防过充过放控制器开始调节,充电电流逐渐变小,当超级电容完全充满,设备进入热待机;经过小段热待机时间后,转为放电模式。放电过程和充电类似,先以恒流模式放电,当超级电容电压达到设定放电限定阈值,放电速率逐渐变小,直到超级电容电压放电到允许的最低值。从图14 和图15 可以看出,在整个充放电过程中,输入输出侧均压及各支路均流控制效果都较好。
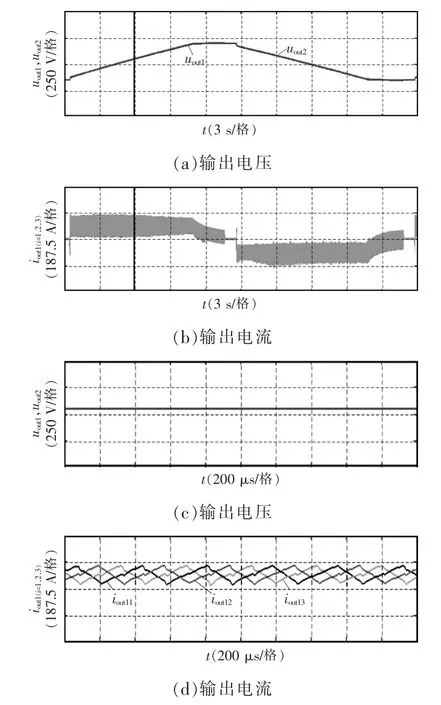
图14 充放电过程中输出电压、输出电流及局部放大实验波形Fig.14 Experimental waveforms of output voltage,output current and partial amplification during charging and discharging


图15 充放电过程中输入电压、输出电流及局部放大实验波形Fig.15 Experimental waveforms of input voltage,output current and partial amplification during charging and discharging
5 结语
本文针对地铁1 500 V 系统再生制动能量吸收利用基于超级电容储能的输入串联三支路交错并联双向DC-DC 变换器及其系统能量管理策略进行了研究,采用电压外环电流内环的双闭环控制方法。结合工程应用提出了基于交流电网电压的自适应系统能量管理启停控制策略,同时结合该拓扑结构及超级电容的特点,对超级电容能量管理控制策略进行优化,提升了超级电容的利用率。通过仿真和实验验证了本文所用控制策略及系统和超级电容能量管理策略的有效性,对基于超级电容储能的地铁再生制动能量吸收利用的工程实施具有一定参考价值。
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
新世纪智能(英语备考)(2018年11期)2018-12-29
通信电源技术(2018年3期)2018-06-26
能源(2017年12期)2018-01-31
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
电信科学(2016年9期)2016-06-15
电测与仪表(2016年13期)2016-04-11