接触式轮廓仪测量数据的建模分析与研究
2021-08-05 09:29朱莉
南通职业大学学报 2021年2期
朱 莉
(南通职业大学 公共教学部,江苏 南通 226007)
轮廓仪是一种两坐标测量仪器,其工作原理是:探针接触被测工件表面并匀速滑行,传感器针对被测表面的几何变化,在X(水平)和Z(竖直)方向分别采样,并转换成电信号,该电信号经放大等环节处理,转换成数字信号,以坐标的形式储存在数据文件中。在理想状况下,轮廓曲线应是光滑的,但由于接触式轮廓仪存在探针沾污或缺陷、扫描位置不准等问题,检测到的轮廓曲线出现粗糙不平的情况,这给工件形状的准确标注带来影响。
为简化问题,假设被测工件的轮廓线是由直线和圆弧构成的平面曲线。2020高教社杯全国大学生数学建模竞赛(CUMCM)D题要求,建立数学模型,针对附件1—附件4[1]所提供的轮廓仪测量数据,进行建模分析,精准计算各项参数,获取相应的轮廓图,完成文献[1]的问题1—4的研究。
1 问题1 数据定位与测量、拟合模型
问题1要求[1]:针对附件1的工件1在水平状态下的测量数据,分析其轮廓线,计算其各项参数。
1.1 用画图软件画出工件1的轮廓图
图1所示工件1的轮廓图由24段曲(直)线构成,A2~A24表示各段的分界点,A1、A25为起讫点,其中A3、A4、A7、A8、A11、A12是斜线与圆弧的切点,不太容易在图中辨识。
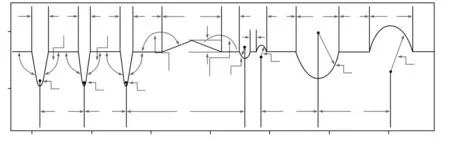
图1 工件1在水平状态下测量的轮廓线
轮廓示意图并不反映其实际尺度。将附件1表level的数据(Xj,Z)j(j是数据序号)导入画图软件(AutoCAD[2]或MATLAB),可立即生成反映实际尺度的工件1轮廓线(简称真实图)。为了求得轮廓线的各项参数值,需要确定A1~A25在表level中的数据序号。
设Ai对应的数据序号为n(ii=1~25),已知表level中的首尾序号为n1=2,n25=143 044。利用画图软件的测量功能,在真实图中测得Ai的坐标(ai,h)i(i=1~25)。由比例关系可得

1.2 用画图软件测量、计算各项参数
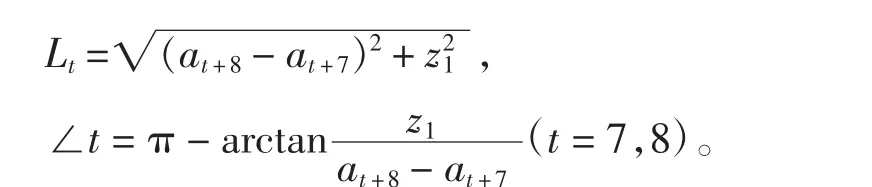
利用画图软件的测量功能,可直接测得真实图中的横向长度和纵向长度。因此,槽口宽度、水平线段长度x1~x13以及人字形线高度z1都可直接测得,如图1。人字形斜线长度和斜线夹角∠7、∠8可直接测量,也可按下式计算:
在AutoCAD中,测得的长度即实际长度;在MATLAB中,测得的长度是像素,需要按比例换算成实际长度。换算比例η(每个像素对应的实际长度)按下式计算:

其中,Xn1、Xn25为表level中的首末横坐标值,与点A1、A25相对应。
对于图1右边的4条圆弧(圆弧4—圆弧7),半径和弧长计算可参看图2。测得圆弧的横向宽度2a和纵向高度h后,由勾股定理及弧长公式,可算得半径R与弧长S:
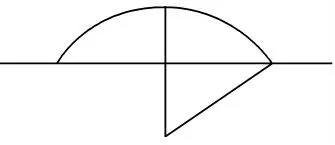
图2 待求圆弧的半径和弧长

注意:由此算得的R与S,还需按式(2)换算为实际长度。同理,下文所得其他长度也要换算。
对于图1左边的3个斜槽,需计算斜线长度和夹角、底圆弧的半径和弧长等。最左边的斜槽如图3所示,O1为圆弧的圆心,F为斜线延长线的交点,其各项参数计算过程如下:
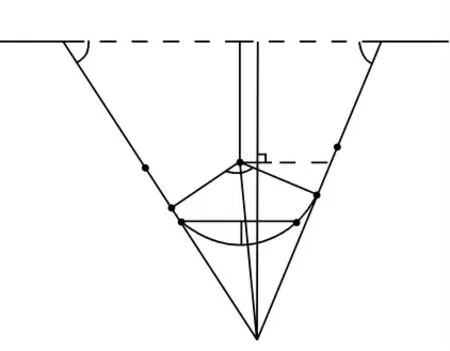
图3 求斜槽的相关参数值示意
鉴于切点A3、A4不易准确辨识,可在其上方测得点A3′、A4′的坐标(a3′,h3′)、(a4′,h4′),由此求得斜线A2A3、A4A5与水平线夹角的正切值:

进而求得图1中的夹角:∠1=π-arctan k1,∠2=π-arctan k2。

另2个斜槽的底圆弧半径Rt、弧长St(t=2,3)、斜边夹角∠t、斜边长度L(tt=3,4,5,6)及槽口宽度的分划λt、μ(tt=2,3)都可类似求得。
图1显示,圆心距c(tt=1~6)等于相邻槽口的分划之和(右边4个圆弧的槽口分划都是槽口宽度的一半),再加上两槽口间的水平距离。具体计算式如下:

1.3 用曲线拟合法求各项参数
用画图软件测量长度和点坐标,需将光标准确放到相关点处,针对锯齿形线条手动操作,难免产生误差。
更精确的办法是直接利用表level的坐标数据(Xj,Zj)(j=n1~n25)计算各项参数。具体做法是,将表中143 043对数据分为24段,以此为样本分别拟合各段曲(直)线方程,再通过联立方程求出相关交点,进而计算所需的各项参数。
根据式(1)求得点Ai对应的数据序号n(ii=1~25),做出序号分段,第i段序号为:n
i~ni+(1i=1,2,…,24)。
这些号段的序号数目成千上万,为避免分界点归属的争议,可掐头去尾,建立序号集:
Ji=({ni+c)i~(ni+1-d)i(}i=1,2,…,24),
选定ci,d(ii=1~24),所选数值以避开分界点为度,一般不超过200。这样掐头去尾后,样本容量仍然成千上万,不会影响曲线拟合的有效性。
在工件1的轮廓图中,有9个直线段处于同一水平线上(参看图1),可予以合并,即令
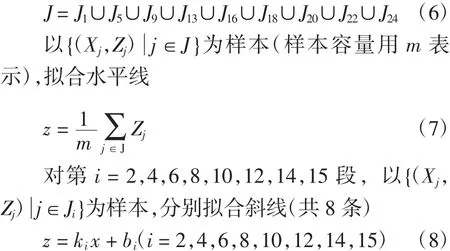
对第i=3,7,11,17,19,21,23段,以({Xj,Z)jj∈Ji}为样本,分别拟合圆(共7个)

曲线拟合可用相关软件,也可在MATLAB中编程实现[3]。有了曲(直)线方程(7)、(8)、(9),就可用代数方法求出交点Ai(i=2,3,…,24)的坐标,再加上式(9)确定的7个圆的半径和圆心坐标,不需要1.2节的复杂公式,即可方便地计算各项参数。
2 问题2 水平校正的坐标变换模型
同一工件在不同次测量时,由于工件放置的角度和位置不同,轮廓线参数的计算值也会存在差异。问题2要求,针对附件1给出的工件轮廓线测量数据,计算其倾斜角度,并作水平校正后,计算其参数,比较两种测量状态下工件各项参数计算值间的差异。
2.1 倾斜轮廓图的水平校正
将附件1表down的数据导入画图软件(AutoCAD或MATLAB),可立即生成工件1的轮廓图,该轮廓图是倾斜的,需作水平校正。
运用1.1节的方法,测量分界点和端点A1~A25的坐标,按式(1)确定与表down中数据对应的序号ni,其中n1=2,n25=141 585。再按式(6)构设斜线指标集J,抽取表down中的数据({Xj,Z)jj∈J}作为样本,拟合成直线z=kx+b。
为了厘清关系,将表down中序号为j的数据(Xj,Zj)记为点Pj(j=n1~n25),其中Pn1=A1是起始点,Pn25=A25是末位点。直线z=kx+b上与Pj横坐标相同的点记为Qj(Xj,kXj+b)。虽然Pj(j∈J)参与直线z=kx+b的拟合,但Pj(j∈J)未必恰在直线上,Qj才在直线上。
拟合所得的斜率k体现工件测量时的倾斜程度,倾斜角为β=arctan k。
水平校正采用旋转法,将直线z=kx+b旋转β角到水平位置(k>0时顺时针转β角,k<0时逆时针转β角)。旋转中心的选择非常关键,必须选取处于直线z=kx+b上的点作为旋转中心,才能将该斜线转平。因为整个图形都要旋转,所以涉及坐标变换。具体操作如图4所示,设C(x,z)为
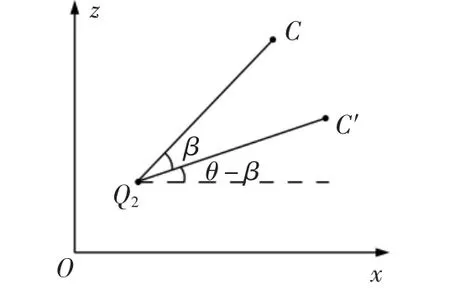
图4 旋转变换示意
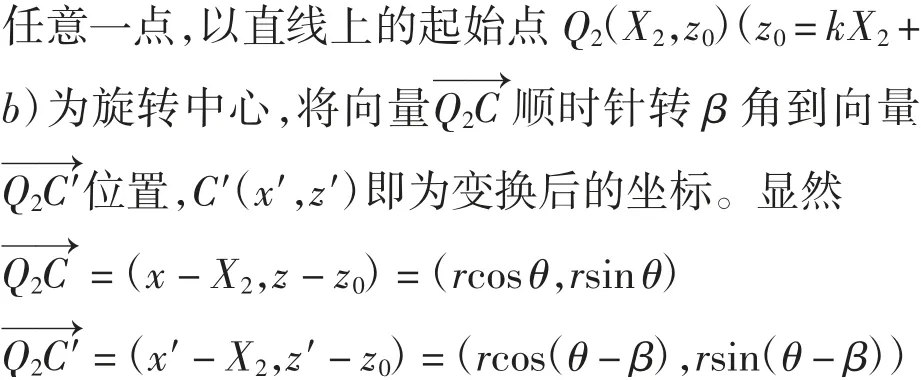
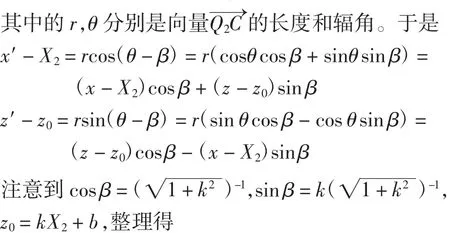
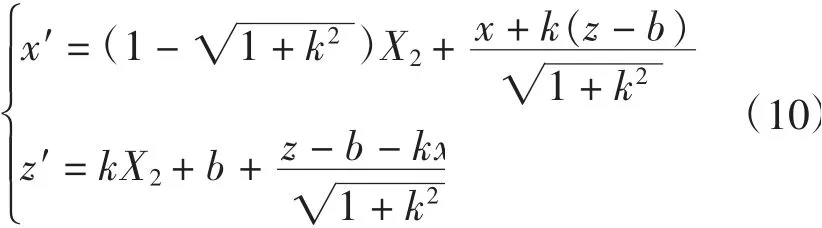
旋转中心并非一定要选起始点Q2,也可选直线z=kx+b上的其他点Q(X,kX+b)(横坐标X可任意选定)。此时只需将式(10)中X2的换成X,即可得到相应的坐标变换式。
将表down的数据(Xj,Z)j代入坐标变换式(10)的右边,得到新的坐标(Xj′,Zj′)。再将变换后的全部数据({Xj′,Zj′)j=n1~n25}导入画图软件(AutoCAD或MATLAB),即可生成水平校正后的工件1轮廓图。
2.2 水平校正后轮廓图的各项参数
对于水平校正后的轮廓图,可运用1.2节的方法,求出槽口宽度与水平线段长度x1~x13、人字形线高度z1、圆弧半径R1~R7、圆弧长度S1~S7、斜线长度L1~L8、夹角∠1~∠8、圆心距c1~c6等各项参数。
也可运用1.3节的方法求出各项参数。因为用于水平校正的坐标变换(10)不改变数据序号,所以2.1节中获得的指标集J(ii=1~24)依然有效,且水平线z=z0已经得到,只需按式(8)、(9)拟合斜线和圆即可。
计算所得参数与问题1的结果基本相同。这是因为图形的整体旋转不会改变图形的形状和尺度,有一些小的差别是由于测量误差或计算误差所致。
3 问题3 校平比对模型
在对工件作多次检测时,每次测量实际是对整个工件中的某一部分进行局部检测。问题3要求针对文献[1]给出的工件2的10次测量数据,计算其倾斜角度和各项参数,并画出完整轮廓线。
3.1 工件2轮廓图的水平校正
附件2有10张表,分别将其数据导入画图软件后,生成10张工件2的轮廓线,这些轮廓线大同小异。相同的是左边都有两段处于同一直线上的斜线(表明测量时的倾斜度),两段斜线之间有一段圆弧,右边是折线状的角型图;不同的是轮廓线两端的缺失有多有少,可相互补充。
接下来利用拟合所得的参数k、b及自行选定的横坐标X,按式(10)实施坐标变换:
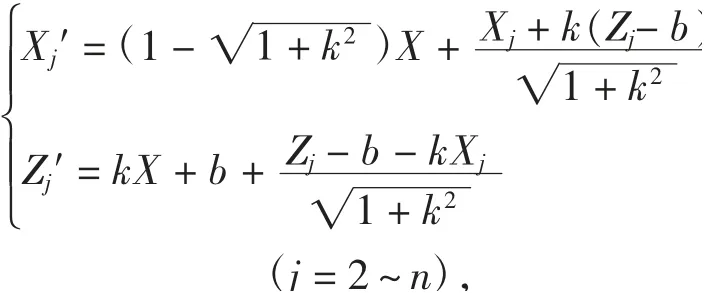
其中,每张图的坐标数据(Xj,Z)j、拟合直线参数k和b、末位数据序号n等,都各不相同。对于每张表,将变换后的全部数据({Xj′,Zj′)j=2~n}导入画图软件,即可生成各自经水平校正的轮廓图。
3.2 画出工件2的完整轮廓线
分析上述10张经水平校正的轮廓图,比对其中2张图(如移动图形使之尽量重合),便可看出明显不合理的部分(测量误差所致)以及两端缺失情况。
在10张图中取一张作为基准(建议取左端起始部分最完整的图),依次与另9张图进行比对,逐步修正不合理的部分,添补缺失的部分。经9次修补,即可得到工件2的完整轮廓线。
然后用1.2节的测量法或1.3节的拟合法,求出轮廓线的各项参数。若用1.3节的拟合法,拟合前尚需将修补所用的数据(点)作适当平移,并调整相应的序号集。
4 问题4 局部修正的求解谋划
为了更准确地标注工件2的各项参数,问题4要求利用附件3、4提供的工件2关于圆和角的9次局部测量数据,修正问题3的结论,并进一步修正工件2的完整轮廓线。
4.1 圆弧局部的进一步修正
附件3有9张表,均为工件2轮廓线中左部两段直线夹圆弧的局部测量数据。对于每张表,分别采用3.1节的方法,拟合直线z=kx+b,利用获得的参数值k和b,实施坐标变换,将变换所得数据导入画图软件,可生成9张经水平校正的两线夹圆弧局部轮廓图。
用3.2节的方法比对上述9张图,修正明显不合理的部分,得到最准确的局部轮廓图,再用其替换3.2节所得完整轮廓线中两线夹圆弧的局部,实现对圆弧局部的进一步修正。
4.2 角型局部的进一步修正
附件4也有9张表,均为工件2轮廓线中右部折线状角型局部的测量数据。将9张表的数据分别导入画图软件,生成9张工件2的角型局部轮廓线。结果表明,9张图形状类似,左部都有一直线段。
和4.1节一样,经直线拟合、坐标变换,生成9张经水平校正的角型局部轮廓图。然后比对这9张图,修正明显不合理的部分,得到最准确的角型局部轮廓图。再用其替换4.1节得到的经圆弧修正后的完整轮廓线中折线状的局部,便实现了对角型局部的进一步修正。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
建材发展导向(2022年4期)2022-03-16
武汉工程大学学报(2019年6期)2020-01-03
学苑创造·B版(2019年4期)2019-05-09
知识文库(2018年7期)2018-05-14
计算机系统应用(2017年3期)2017-03-27
股市动态分析(2016年17期)2016-10-20
股市动态分析(2016年13期)2016-10-17
股市动态分析(2016年10期)2016-09-30
股市动态分析(2016年2期)2016-09-27