基于控制点影像库的遥感影像几何纠正研究
2021-08-04 05:11:06勾金荣钟自明
经纬天地 2021年2期
勾金荣 钟自明 刘 博
(1.黑龙江龙诚福测地理信息技术有限公司,黑龙江 哈尔滨 150028;2.黑龙江省第五测绘地理信息工程院,黑龙江 哈尔滨 150081;3.黑龙江地理信息工程院,黑龙江 哈尔滨 150081)
0.引言
随着卫星及遥感技术的深度发展,卫星遥感影像的应用领域范围也在不断壮大,在农业、林业、草原、海洋、城市规划、自然资源管理、环境保护等很多领域发挥着重要的作用。卫星影像具有时效性强、分辨率高、地理信息丰富、覆盖范围广等特点,为国民经济发展和经济建设提供了重要的空间信息参考数据,但是获取到的卫星影像一般需要进行几何纠正后才能与对应坐标系的空间数据进行叠加,在卫星影像几何纠正过程中,需要对影像覆盖区域采集控制点,如果对于每一景影像在作业前都重新采集控制点,那么相关的工作量是十分巨大的。目前较为方便的做法是利用计算机软件技术,将预先采集好的控制点以数据库的形式进行分类存储,在需要对影像进行几何纠正的时候调用对应的控制点,达到提高控制点使用效率的目的。
1.关键技术及基础理论研究
1.1 控制点影像
控制点影像是对卫星影像控制点的一种升级和再利用。控制点影像一般指的是裁切成宽高等比例像素的正方形影像块,一般以2的几何次方的像素宽高积制作,例如,32×32、64×64、128×128、256×256等。原则上,控制点影像分辨率宽高积不超过512×512,过大的控制点影像会占用较多的存储空间。控制点影像的特点是单张图片较小、整体占用存储空间较大、表达影像纹理直观、准确记录控制点信息等。控制点影像一般还包含控制点的基本元数据,例如,坐标信息等。在同一幅影像中,控制点影像的选取尽量均匀分布于影像画幅中。控制点影像表达了控制点的空间信息及辅助信息,从控制点影像中,不仅能够查看控制点的坐标,而且还可以查看影像使用的椭球参数、坐标系、影像采集传感器类型、影像分辨率等信息,以及在影像采集时人为加入的一些备注信息,控制点影像示例(如图1所示):

图1 控制点影像示例
1.2 影像配准
影像配准是指将两幅影像重叠区域利用控制点转换为相同坐标系的立体像对,或者将多幅影像,通过变换放在相同的坐标系中,从而实现影像套叠使用的一系列操作过程。影像配准一般分为灰度匹配和特征值匹配等两种方法,其中特征值匹配方法能够解决不同分辨率、不同亮度、异构视角的影像匹配需求。一般的配准步骤为:首先建立尺度空间,找到同名点,通过算法剔除误匹配点,找到同名点的导向特征值,然后提取导向特征值属性,最终实现影像配准。
1.3 影像几何纠正
影像几何纠正是让卫星影像在一定范围内进行图像变形,变形后影像的投影满足目标坐标系的相关参数,常规做法是,首先建立符合需求的模型、确定范围、修补漏洞、空间变换、影像重采样、影像输出等。在几何纠正过程中,首先要找到原始影像的坐标系,然后确定目标影像的坐标系,建立转换模型,通过计算得出目标影像同名像点的位置。在转换过程中要充分考虑到地表起伏、大气折光、相机镜头畸变等外因,利用共线方程进行计算,得出目标像点的位置。
2.控制点影像库的建立
2.1 控制点影像数据库设计
2.2 控制点影像管理系统
控制点影像管理系统以控制点影像数据为核心,按照不同的功能划分为多个子系统和若干个功能模块,负责控制点影像的采集、存储、维护和检索。同时,控制点影像库管理系统还能够对影像控制点进行选取,并且能够动态分析选取到的控制点的冗余程度,剔除误匹配的控制点,建立成像模型,满足地理信息数据加工生产过程中卫星影像纠正的需求。控制点影像管理系统的子系统和功能模块(如表2所示):

表2 控制点影像管理系统
数据库表设计。系统数据库采用PostgreSQL,数据库表之间关系符合第三范式,系统之间的关系E-R图(如图2所示):
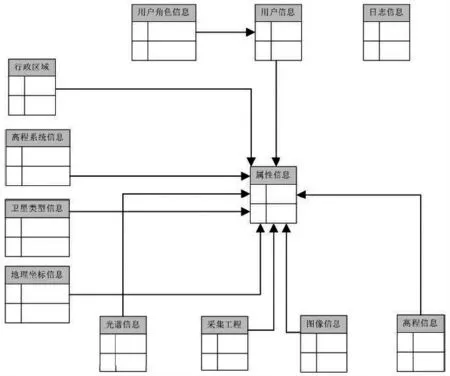
图2 数据库表E-R图
数据库各表之间的描述(如表1所示):

表1 数据库表描述
影像数据采集子系统包括4个子模块,实现控制点的读取、属性录入、影像查找、控制点影像裁切等功能,其主界面(如图3所示):

图3 影像数据采集子系统的主界面
影像库管理子系统主要负责管理系统的用户和工程,用户的每一步操作都被记录为日志,可以在操作错误后回退,最多可以回退50步,并实现了简单的数据编辑和空间分析功能;控制点影像库数据检索子系统可以按照行政区划或代码快速查找系统中保存的控制点影像,及时调用,并可以查看控制点影像的整体分布情况。
3.影像几何处理
3.1 特征点误匹配剔除算法
异构的卫星影像,按照分辨率相同和分辨率不同分为两类。当分辨率相同时,影像特征点选取特征点连线的距离和斜率作为参考(如图4所示);当分辨率不同时,影像特征点选取特征点连线的延长线的交汇点作为参考(如图5所示)。目前便于计算的方法是利用聚合法找到误匹配的点,然后利用配积方法剔除误匹配点。
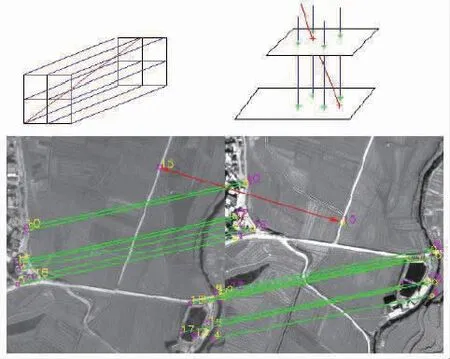
图4 分辨率相同特征点的关系

图5 分辨率不同特征点的关系
特征点误匹配剔除算法步骤(如表3所示):

表3 特征点误匹配剔除的算法执行步骤
3.2 成像模型
从像点坐标到物方坐标记作:(l,p)→(X,Y,Z),共分为六步。
第一步,计算l行p列像素所对应的成像时间如式(1)所示:

式(1)中,tc为中央扫描行的摄影时间;lsp为每行的扫描时间;lc为中央扫描行的行号。

第三步,通过p列的成像倾角(ψx)p和(ψy)p计算(l,p)在坐标系下的成像方向矢量,如式(4)和式(5)所示:


式(9)至式(11)中ap(ti)、ar(ti)、ay(ti)分别为时刻卫星的姿态角,可以从辅助数据文件中获取。


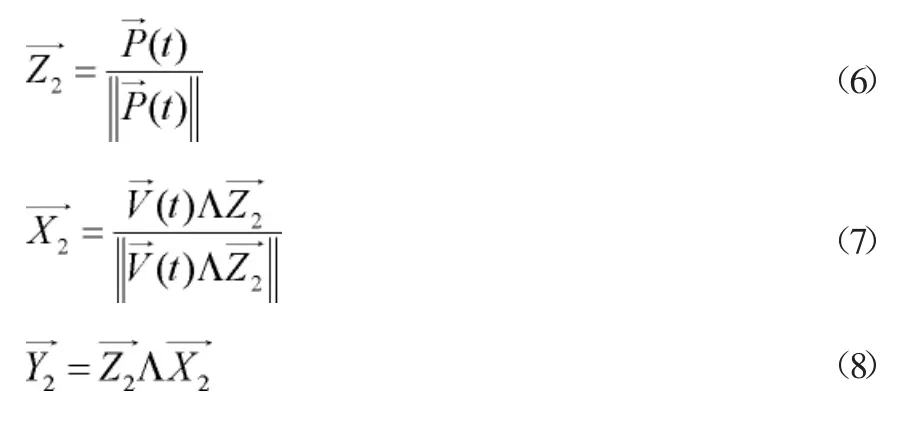
式(17)中,X2、Y2、Z2为轨道坐标系O-X2Y2Z2的三个坐标轴方向矢量。


图6 成像方与参考椭球交会
综上,以共线方程的形式写作如式(20)所示:

获得导航坐标系下的成像方向矢量与地面坐标系的观测方向的关系;投影中心为(XP,YP,ZP),坐标矢量为(X,Y,Z),投影系数为u,旋转矩阵如式(21)所示:

最终可得共线方程如式(22)和式(23)所示:

3.3 几何纠正
在作业过程中,收集作业范围内的控制点影像,及时录入控制点影像数据库;在应用过程中,通过检索控制点影像数据库快速找到特征点,应用特征点剔除算法去掉误匹配的特征点,加载成像模型相关算法,实现对遥感影像的几何纠正,数据处理完毕后,将请求提交到服务器,进行影像重采样,这个步骤的处理时间较长,最终得到纠正后的影像成果。
4.结束语
本论文通过建立控制点影像数据库,快速完成卫星遥感影像的几何纠正,首先将控制点影像裁切成合适像素的图幅,利用数据库技术对控制点影像进行存储,提高了检索效率;其次利用控制点影像库数据快速匹配影像特征点,剔除误匹配点,建立成像模型,从而提高了卫星遥感影像的几何纠正效率。
猜你喜欢
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
中等数学(2017年2期)2017-06-01 12:21:50
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21