基于机器视觉的测绘工程地面位移形变测量方法
2021-08-04 05:11:18白洁
经纬天地 2021年2期
白 洁
(阳城县自然资源局,山西 阳城 048100)
0.引言
为了给地质调查工作提供大量的可视化数据,在开始勘探和开采之前,首先要对目标空间和地面的各种信息进行采集与分析,并绘制相应的地形图,因此测绘工程是地质工程的第一个步骤。受到地球以及自然环境的影响,不同地区呈现出不同的地质结构,在测绘工程中需要对地表地物、地貌、地下水文和矿藏等部分信息进行采集,并在最终的地形图中进行标注[1]。然而,在测绘工程施工过程中,地表重力发生变化,可能会产生地面形变,若地面的形变量过大,就会破坏研究区域的地质结构,甚至会威胁到工作人员的生命安全。因此,需要对测绘工程地面位移形变进行测量。
由于地面厚度不同,且无法直接使用硬件测量设备进行测量,这为地面位移形变测量方法的运行带来了极大挑战。国内外先后对地面的形变测量内容进行研究,并得出了部分较为成熟的研究成果,具体包括基于姿态匹配的形变测量方法、基于全息二次曝光的物体形变测量方法。然而将上述传统方法应用到实际的测绘工程中,存在严重测量精度低的问题,为此引入机器视觉技术。
人类从外界环境中获取信息的百分之八十都是通过视觉功能,而机器视觉技术则是利用机器设备模拟人类的视觉功能,用图像的形式形成空间模式,统计最终用户实际的检测和测量。机器视觉技术综合了多项技术,被广泛应用到多个领域当中。与传统的测量方法相比,机器视觉测量技术能够同时获得多个观测点的数据信息,处理信息量大,因此得出测量结果也更为精准。另外,机器视觉能够将瞬时捕捉的图像信息进行存储,实现信息的重复使用,在测量过程中无需与被测物体,也就是地面接触,在避免对被测物体噪声损伤的同时,也降低人为测量工作的难度和危险性。通过机器视觉技术的应用,实现测绘工程地面位移形变测量方法的优化设计,进而提升地面位移形变的测量精度。
1.测绘工程地面位移形变测量方法设计
利用机器视觉的一系列硬件设备和通信装置,设置测量内容为研究区域内地面垂直方向的位移形变量,测量原理(如图1所示):
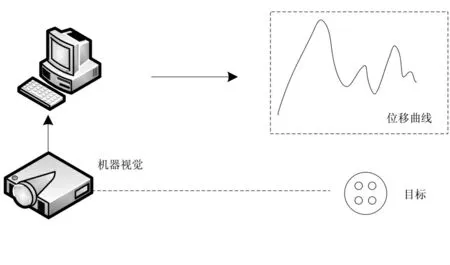
图1 机器视觉测量原理图
在机器视觉硬件设备的支持下,收集地面图像,并将其 传输给计算机,经过对图像信息的处理与分析后,提取形变特征点,对比前后多个特征点位置,得出地面位移形变测量结果。
1.1 选择机器视觉测量设备型号
根据机器视觉的运行原理,分别从相机、镜头和光源三个方面选择设备型号。电荷耦合器件和互补金属氧化物半导体是相机的两种成像元件,由于电荷耦合器件具有占用空间小、集成度高以及处理速度快等优势,因此,优先选择面阵CMOS相机[2]。设置曝光时间和分辨率作为相机型号选择的约束指标,其中,定义最短曝光时间为1/16s。相机分辨率可以通过公式(1)来估计。

式(1)中,H和H′为视野范围水平长度和水平方向分辨率;V和V′为视野范围垂直长度和垂直方向分辨率[3];σ为方差。为了避免镜头变焦现象的发生,选用定焦镜头,且选择的镜头需要带有调节光圈的功能,并支持手动和自动两种调节方式。机器视觉技术中光源的作用是增强待处理的物体特征,同时,降低环境噪声对成像结果的干扰,选择的光源需要满足强度适中、光照均匀、范围合理等条件。
1.2 机器视觉相机标定
相机标定是相机设备采集图像与实际空间之间的桥梁,确定相机的光学参数,实现图像坐标与空间坐标的相互转换[4]。分别定义相机、图像、成像和世界四个坐标系,四个坐标系的关系(如图2所示):

图2 坐标系转换关系图
图像坐标系中的任意一点(u0,v0)在成像坐标系中的对应点如式(2)所示:
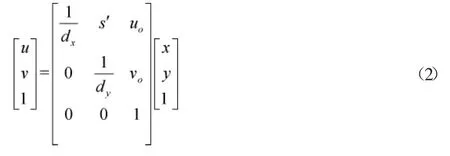
式(2)中,dx和dy分别为成像坐标系中任意像素在x轴和y轴方向上的物理尺寸;s′为倾斜因子[5]。那么相机成像的过程也就是世界坐标系节点变换到图像坐标系的过程如式(3)所示:

式(3)中,(XC,YC,ZC)和(XW,YW,ZW)分别为图像和世界坐标系下的齐次坐标,参数A为相机参数矩阵;ZC为标定参数。另外,R和t分别为旋转正交矩阵和平移向量。将测绘工程地面上的任意一点代入到公式(3)中,便可以得到该点在图像中的像素位置坐标。通过机器视觉相机的标定,测绘地面的位移形变测量过程中,通过测量图像坐标系中的位移量,便可转换得出实际空间中的位移量。
1.3 测绘工程地面图像采样与量化
利用机器视觉和硬件设备的成像原理,在光源设备的支持下,得出一张地面采样图像。采样图像上的光照强度特征如式(4)所示:

式(4)中,变量i(x,y)和r(x,y)分别为光能的入射函数和反射函数。经过对连续光强图像的离散处理,形成采样图像对应的量化数字图像,并将其存储在计算机中。同理在相同的时间间隔内,采集第二张地面图像,经过多次采样得出连续的图像序列。
1.4 测绘工程地面图像预处理
1.4.1 图像灰度化
测绘工程地面上的物体以行的方式扫描到相机设备中,在三棱镜的分色作用下,机器视觉生成的图像均为彩色图像。由于位移形变测量与地面颜色的关系不大,因此,为了降低测量工作量和工作难度,需要对采样图像进行灰度化处理。假设初始图像均为RGB格式,则图像的灰度化处理过程如式(5)所示:

式(5)中,R、G和B分别为初始采样图像的颜色分量,最终输出结果A为图像的灰度值。将图像中所有的像素点数据代入到公式(5)中,便可以得到对应的图像灰度矩阵,且矩阵中各个像素点的灰度值均控制在区间[0,255]内。
1.4.2 傅立叶变换
傅立叶变换的目的是将图像的时序特征转换成频率特征,从而体现出图像中灰度变化的剧烈程度,并以此作为判断地面形变位置的重要指标。以采样图像f(x,y)为例,其变换过程如式(6)所示:

式(6)中,参数M和N分别为图像f(x,y)的行数和列数;u和v为傅立叶变换后两个方向上的频率变量;j为常数系数。通过公式(6)的变换处理,可以实现两种类型信号的相互转换,并得出图像的频率分析结果。
1.4.3 滤波降噪
在地面图像采样和传输过程中,受到通信环境的影响,不可避免会产生高斯噪声和椒盐噪声干扰,噪声信号的存在会在一定程度上影响位移形变测量结果的精度,因此,需要利用滤波函数对图像进行降噪处理。优化设计的测量方法中选择巴特沃斯滤波函数,其表达式为:
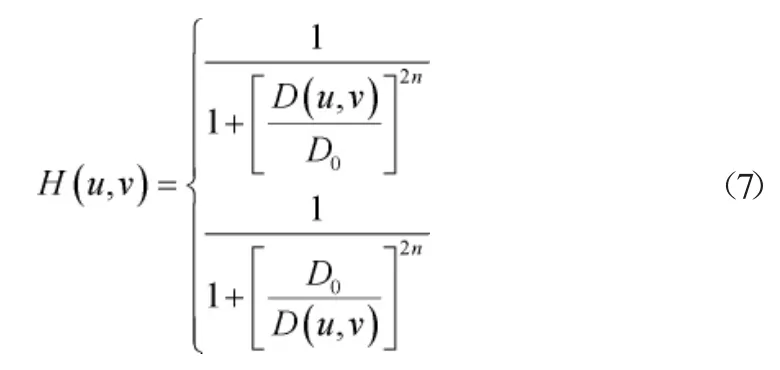
式(7)中,D(u,v)为输入频率;D0为滤波函数的截止频率;n为滤波器阶数。通过公式(7)的运算,可以过滤掉图像中低通噪声和高通噪声,在一定范围内有效降低了图像中的噪声占比。
1.4.4 定位人工标记点
为了降低测量标志的材料和形状对图像处理结果的影响,在图像处理过程中设置了合理的人工标志,一般来说,人工标志为实心圆形状,标记结构(如图3所示):
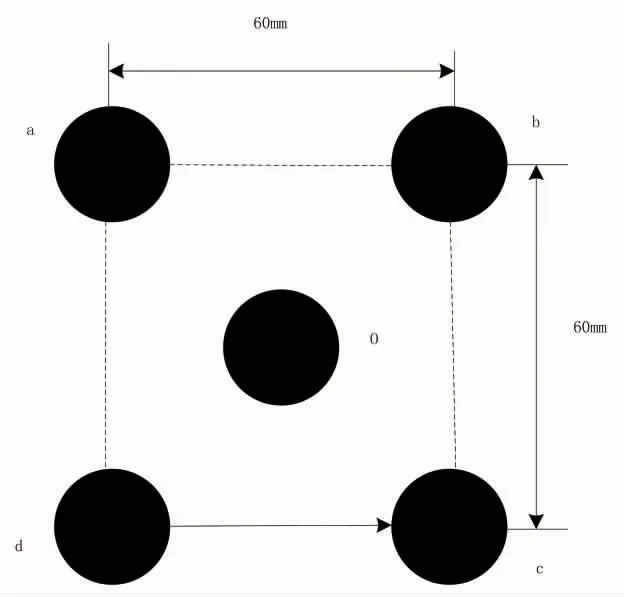
图3 人工标记点示意图
根据连通域的质心位置识别圆形标志点,并利用最小二乘椭圆拟合算法确定圆形标志点位置。
1.5 确定地面位移形变特征点
对连续图像进行比较,提取灰度变化的像素点,并将其设置为位移形变特征点,提取该点的质心特征。该方法将图像中像素的强度集中在图像中心,利用图像帧中心确定代表图像特征向量的坐标系的中心,在跟踪之前完成特征点目标的捕获,使目标完全位于视场区域。特征点目标的质心坐标如式(8)所示:
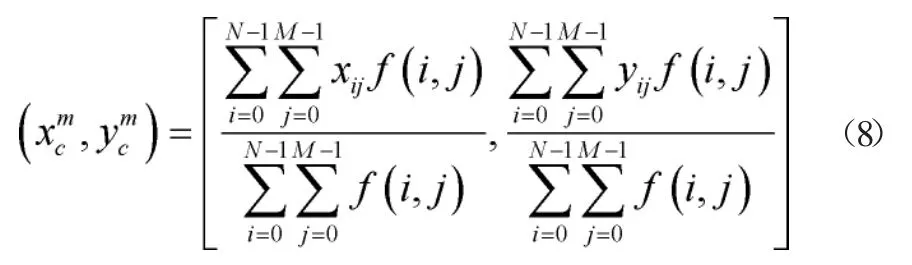
式(8)中,f(i,j)为图像中(i,j)位置上的像素强度;xij和yij分别为(i,j)位置上像素中心在x轴和与y轴方向上的坐标。
1.6 实现地面位移形变测量
根据地面位移形变特征点的确定结果,得出位移形变量化测量结果。地面位移形变可以分为两种情况:一种是位移形变方向与实现方向一致,此时利用公式(2)进行逆运算,便可以得出位移形变图像像素对应的空间环境坐标,并利用公式(9)得出位移测量结果。

式(9)中,y0为初始地面纵向坐标;yi为形变变化后统一位置的纵向坐标,另外max为最大值函数。若在地面形变的过程中出现水平影响因素,使得位移形变与视线方向之间出现夹角,则此时的位移量如式(10)所示:

式(10)中,θ为位移形变方向与视线方向之间的夹角。为了降低光源和环境温度带来的测量误差,对初步输出的测量结果进行补偿处理,处理过程如式(11)所示:

式(11)中,Δx和Δy分别为测量补偿量。
2.测量精度测试实验分析
为了测试设计机器视觉的测绘工程地面位移形变测量方法的测试精度,以及在测绘工程中的应用性能,在实际测绘工程项目的支持下进行测试实验,并得出量化的测试结果。
2.1 测绘工程项目概述
选择的测绘工程为中国西北地区一处新开发的矿山地区,测绘工程的目的是结合开发对地质数据进行更新。测绘工程研究地区的覆盖范围约为2462km2,其中,包括山丘、平原、河流等多种地质类型,测绘工程的施工时间为2020年11月至2021年4月,为期5个月。
2.2 配置实验环境
实验环境包括硬件和软件两个部分:其中硬件部分为设计的地面位移形变测量方法以及实验运行提供设备支持,而软件部分主要对硬件设备采集的数据进行统计和处理。由于设计的测量方法应用了机器视觉技术,因此,配置的实验环境(如图4所示):
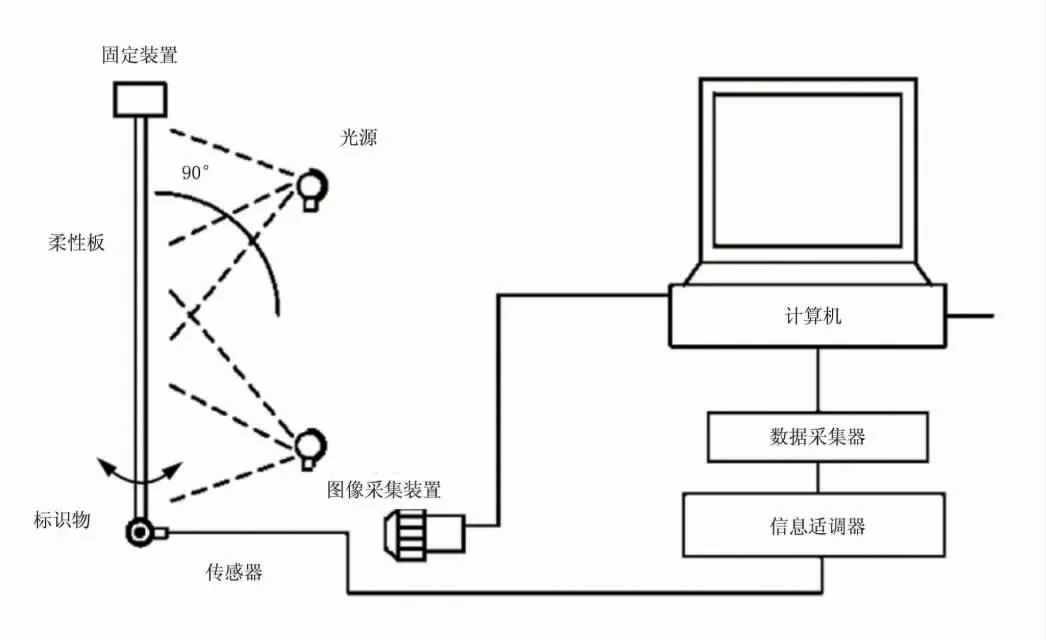
图4 实验环境装置连接示意图
从图4中可以看出,实现环境的硬件部分主要由光照模块、成像模块、信号传输模块以及计算机分析模块等设备组成。计算机分析模块采用Dell计算机为主测计算机,该设备的CPU为E3-1230 V2@3.30Hz,安装内存16.0GB,能够满足机器视觉技术对图像数据的动态处理要求。交换机设备用来实现实时测量信号的传输,采用S1700-8G-AC千兆交换机和无线传输网络,保证传输距离大于20m。另外,实验准备的相机和镜头设备参数(如表1所示):

表1 相机和镜头参数设置表
考虑到地面位移形变图像采样时间过长可能会引发相机处理数据量过大的问题,因此,设置相机的连续采样时长为60s。实验软件环境方面采用labview与matlab混合编程模式,将位移形变测量方法的运行分为采集、处理和输出3个部分,实验开发的软件运行界面(如图5所示):

图5 地面位移形变运行界面
2.3 设置地面形变标准位移量
在测绘工程研究环境下,设置多个测量点,并对多个测量点设置位移形变量,以此作为测量精度的对比标准,标准位移量的设置情况(如表2所示)。
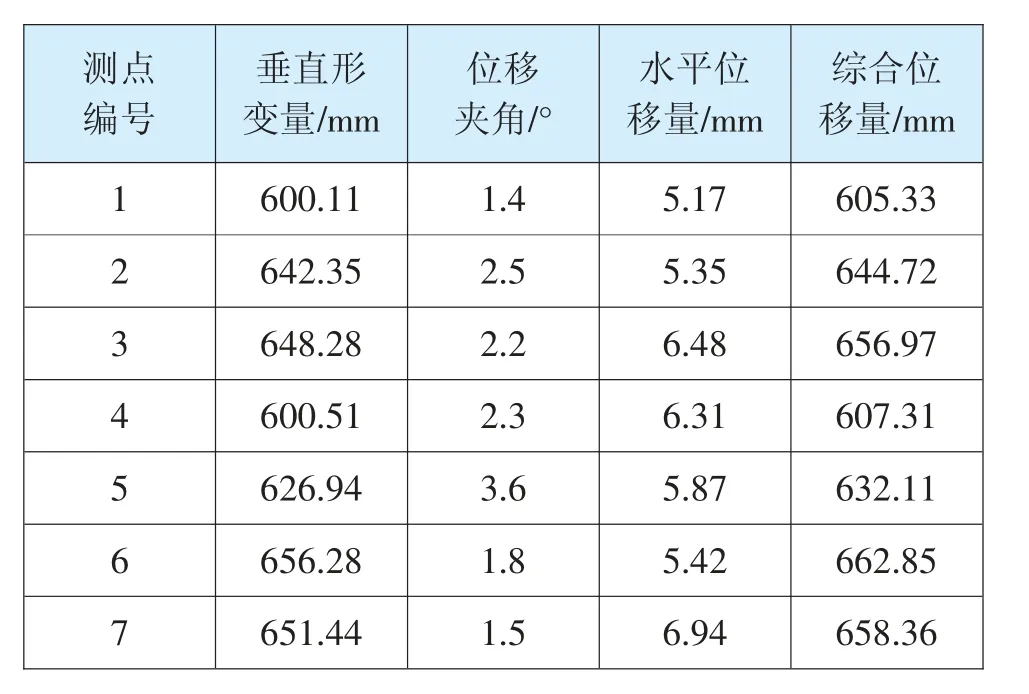
表2 地面形变标准位移量设置表
2.4 描述现场实验测试过程
为了形成实验对比,实验设置了传统的位移形变测量方法和基于SBAS技术的形变测量方法作为实验的两种对比方法,且两种对比方法的运行环境和处理样本均相同,保证实验变量唯一。收集实时采集的研究地区图像序列,并将其导入到主测计算机中,两种对比方法无法调用机器视觉技术采集的图像数据。经过3种测量方法的运行与数据处理,得出测量结果(如图6所示):
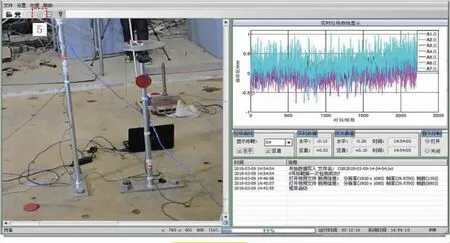
图6 地面位移形变测量输出结果
设置实验变量为地面位移形变测量误差,误差越小证明测量精度越高,反之,则说明测量精度越低。
2.5 测量精度测试结果分析
通过相关数据的记录与统计,得出量化测量结果,其中,设计测量方法得出的结果(如表3所示):

表3 设计地面位移形变测量数据表
同理可以得出两种对比方法的位移形变测量数据,将表3以及对比方法输出的数据与表2中的数据进行比对,便可以得出测量误差测试结果(如表4所示):

表4 测量误差数据表
从表4中可以直观地看出:3种测量方法的平均误差分别为0.97mm、0.36mm和0.06mm,由此可见:基于机器视觉的测绘工程地面位移形变测量方法的测量误差更小,即测量精度更优。
3.结束语
测绘工程作为地质勘查工作中的重要环节,对于数据的精准度有着较高的要求,通过机器视觉技术的应用,不仅提供了地面位移形变的准确测量结果,同时也降低了人员工作的难度。
猜你喜欢
环球时报(2022-07-13)2022-07-13 17:18:39
环球时报(2022-03-14)2022-03-14 18:19:44
电影(2018年8期)2018-09-21 08:00:06
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
电测与仪表(2016年16期)2016-04-12 00:25:32
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:38
印制电路信息(2015年6期)2015-12-30 12:57:58
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53