
基于核相关滤波的无人机偏航角跟踪控制系统设计
2021-08-04 08:37肖英楠
计算机测量与控制 2021年7期
肖英楠
(成都理工大学 工程技术学院,成都 614000)
0 引言
无人机是不携带驾驶员,利用无线电通讯设备进行遥控的飞机[1]。无人机的动力学模型简单,因为两侧翼面压力差,使翼面形成压力差,从而实现飞行。无人机操作简单,机动灵活,但易受风等外力影响,所以无人机对外部环境有着严格的要求。以往的四旋翼无人机都是采用非线性自抗扰控制技术,无人机的3个分量都是非线性的,因此可以很好实现解耦,而采用非线性有源干扰抑制技术,由于采用了非线性模块,因此其调节参数较多,难以准确地确定稳定边界,且容易产生抖振现象,使得所设计的控制器难以应用于工程实际;利用线性自抗扰技术实现了无人机的控制,该控制器调节参数少,易于整定,能够对系统总干扰实时估计和补偿,并且易于工程应用[2]。但由于放弃了传统自抗扰跟踪微分器,在某些特殊情况下,降低了系统动态性能,使得执行器容易饱和,系统输出容易超调,实际控制效果也会有所改变。根据工程实际需要,提出了一种基于核相关滤波的无人机偏航角跟踪控制系统设计方案,该系统可靠性和实用性在实际飞行中得到了验证。
1 系统总体结构设计
无人驾驶飞行器偏航角跟踪控制系统的总体结构见图1。
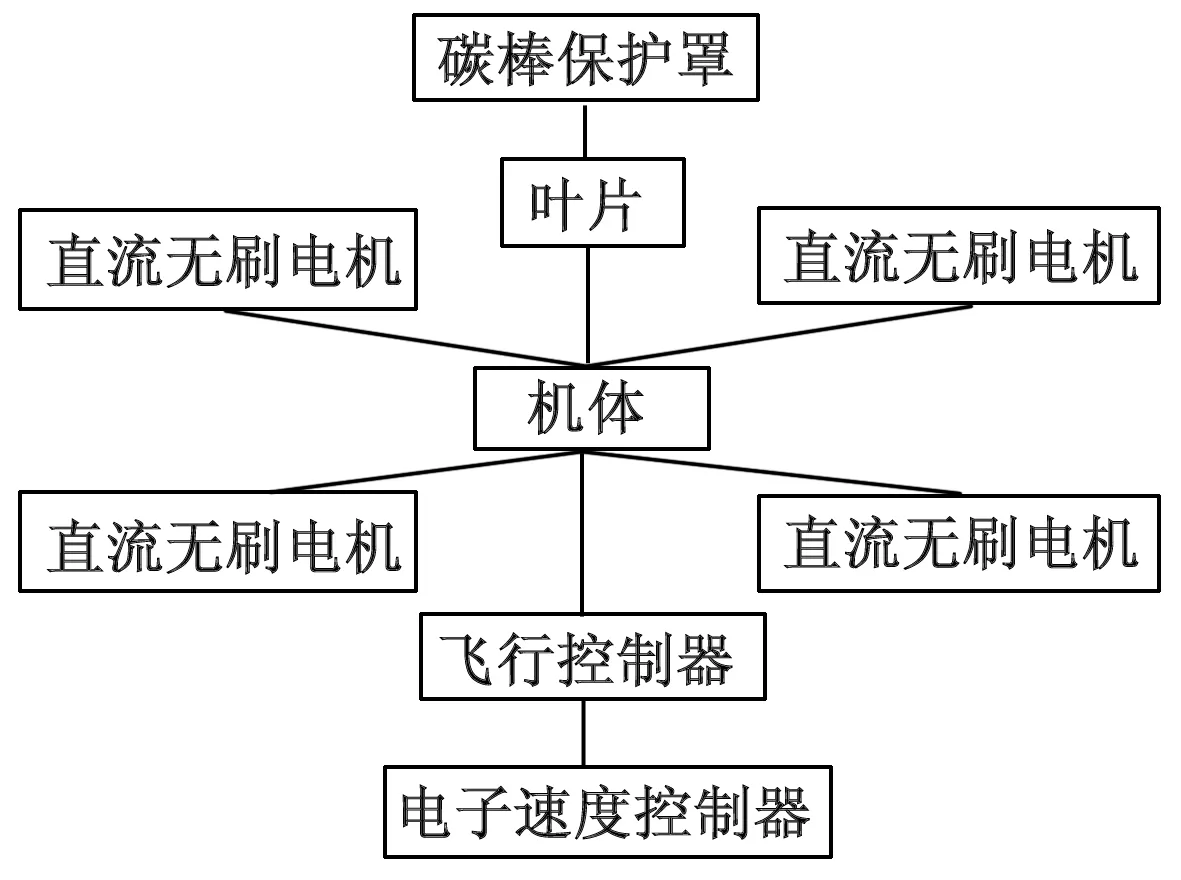
图1 系统总体结构
由图1可知,该无人机偏航角跟踪控制系统主要由碳棒保护罩、叶片、直流无刷电机、机体、飞行控制和电子速度控制器组成。刀片装在直流无刷电机上,机身四端装有四台直流无刷电机[3]。4台直流无刷电动机全部由4台电子驱动,飞控是无人机的重要组成部分,它被固定在四翼无人机中心[4]。
碳棒保护罩是由多根碳棒连接在一起的,其弹性较好。碳棒护罩能保证实验员和飞行控制台的安全,叶轮是提升和抗扭能力的直接源泉。双角翼在同一个方向上转动,产生了升力和抗扭矩,使得无人机可以灵活地飞行。直流无刷电机重量轻,寿命长,性能可靠,永不磨损。重点是它具有低噪声、旋转平滑等特点,非常适合无人机。机体材料为轻金属,耐磨损,电子速度控制器和直流无刷电机固定在机体的末端,两个电池组分别固定在机体中心下端和带子上[5]。无人机的核心是飞行控制,飞控系统中内建的传感器能够感知无人机的姿态信息。电速控制器的一端与直流无刷电机相连,如果随意改变两根导线的顺序,就会使无刷直流电机转向[6]。
2 系统硬件结构设计
无人机由于承载能力有限,其飞行质量完全取决于控制系统,所以飞行控制硬件的选择应遵循轻便、性能好、稳定可靠的原则。无人机姿态控制所需的硬件主要有主控芯片、姿态传感器、高度计、遥控接收机等。图2中显示了系统硬件结构。
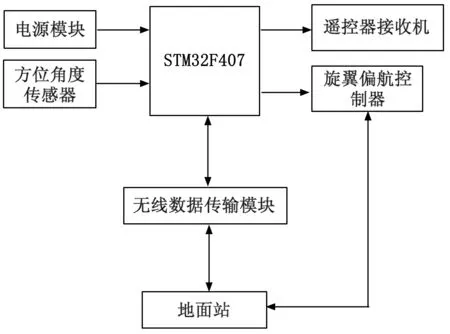
图2 系统硬件结构
2.1 主控芯片
无人机主控芯片主要负责传感器数据的采集、读取、与地面站的信息交互、无人机姿态的实时计算、姿态控制。因此,要求主控芯片具备快速运算能力和较强可靠性[7-9]。所以,在252MIPSCortex-M4结构的32位单片机基础上,采用 ST公司STM32F407作为主控芯片,它支持单精度浮点运算,时钟频率可以达到168 MHz,拥有丰富的硬件存取 II资源(6 USART,2I2C,2 CAN等),DMA控制方式强大,能保证无人机控制系统的稳定性和实时性。
2.2 方位角度传感器
角传感器是用来检测的,与轴线配合。与 RCX连接时,角度传感器计数转轴为1/16。沿着某一方向旋转,计数增加,但改变旋转方向,计数减少。计数器关系到角度传感器的初始位置,方向盘下安装有转向角传感器,它是霍尔传感器。与方向盘下转换模块配合,为ESP电子控制单元提供方向盘转动方向、角度、速度等信号[10-12]。由感应器测得的方位角是沿顺时针方向从一个点的北向线到目标线的水平角,这是一个双面角,也就是子午圆平面与通过该物体的水平子午圆平面的夹角,将子午圈所在面作为起始面,顺时针方向测量[13]。地平圈也可进行方位测量,从南点开始以顺时针方向向南进行测量。
2.3 遥控器接收机
接收端匹配遥控器统一频率为2.4 GHz,支持SBUS信号。该系统可用于地面遥控,提供无人机控制指令,基于遥控杆的位置,生成具有不同脉冲宽度PWM信号,并将PWM转换为所需的控制指令,这样操作人员就可以通过遥控器上的杠杆来控制无人机。当接收器的触点对频接收通电后,触点按键,打开遥控器电源开关,对频成功;而SBUS主要用于多轴无人机,适用于飞控等支持SBUS信号飞控。在系统设置中,选择TX电压,如果采用用户自行供电方式,应注意接线方式,否则会烧坏遥控。接收机支持PWM信号,8个通道信号同步并行响应,抗干扰能力得到提高,同时SBUS信号插口,解决了接收机与飞控连接线复杂难题。当接收机接收不到发射机信号时,接收机油门输出900US失控保护信号。
2.4 旋翼偏航控制器
无人驾驶飞行器在飞行过程中,可以控制4种基本运动状态:垂直上升、悬停、滚动、俯仰和水平旋转。四旋翼无人机在实现垂直起升和悬停时,需要同时改变4个电机的输出功率,使4个转子的转速同时发生变化,从而改变了系统总升力[14-15]。总提升力大于或小于飞机重力时,无人机垂直运动,当升力等于飞行器重力时,无人机悬停运动。
要实现旋翼无人机滚转运动,就必须对四旋翼左右电机输出功率进行调整。就右倾运动而言,通过增大左转电机输出功率可以提高左转电机速度。就左倾运动而言,降低右旋翼电机输出功率同时,使右升力小于左升力,机体向右倾斜。基于力的分析,飞机上的合力推动旋翼右转。纵摇运动和滚摇运动的实现原理基本上相同,只不过是系统前后转子电机输出功率不同。
3 系统软件设计
3.1 核相关滤波的无人机偏航角跟踪控制原理
核相关滤波器跟踪就是利用滤波器对检测到的目标图像进行滤波,然后根据滤波结果对目标定位。假定输入图像经过滤波后,输出结果为二维高斯分布,峰值正好位于输入图像的中心。核相关滤波器跟踪的关键在于通过搜索滤波器响应峰值来估计目标位置,构造滤波器并根据目标变化和场景变化实时更新。
以标准目标模板f(x)作为输入图像,目标处于模板的中心位置。滤波器系统函数为h(x)滤波器的响应输出为g(x),则系统的响应如式(1)所示:
g(x)=f(x)⊗g(x)
(1)
公式(1)中,⊗表示卷积计算,根据核相关滤波对应的乘积,在滤波范围内按元素一一对应相乘。输入无人机拍摄到的图像傅立叶变换,输入图像变换结果为:
F=μ(f)
(2)
滤波器函数的傅立叶变换为:
H=μ(h)
(3)
滤波响应的傅立叶变换为:
G=μ(g)
(4)
其中:μ表示傅立叶变换参数,核相关滤波响应公式为:
G=F*Hϑ
(5)
公式(5)中,*表示按照元素相乘符号;ϑ表示复数共轭。
手工指定约束滤波的目标模板,约束滤波输出达到预期的最大响应。指定滤波器输出的二维高斯函数,其峰值以目标模板f中的目标为中心,则滤波器系统函数Hϑ可以表示为:

(6)
用所获得的滤波函数对后续视频进行相关滤波,然后再通过傅立叶反变换进行时域变换。理论上,滤波器的响应总是在目标位置处取最大值,因此可以通过滤波器的输运来估计目标运动位置。
3.2 偏航角跟踪控制流程
四台直流无刷电动机产生的反矩力不能抵消,机体将绕Z轴逆时针旋转。不考虑弹性变形和振动,将整个旋翼可视为一个六自由度的刚体,四旋翼提供升力,因此,无人机是一个四输入六输出的控制系统。刚性物体的六个自由度是围绕3个轴线旋转(滚动、俯仰和偏航)和重心沿3个轴线作直线运动(前进和后退,向左和向右以及上升)。当无人机飞行速度较低时,不考虑飞机气动效应,由此确定地面参考坐标系与无人机机体坐标系,如图3所示。

图3 地面参考坐标系与无人机机体坐标系
由图3可知,为了设计无人机偏航角跟踪控制流程,在图3所示坐标系支持下,得到地面参考坐标系和固定在无人机上的坐标系,由此确定无人机在地面参考坐标系中相对于坐标系原点的姿态和位置。其中姿态角表示无人机偏航角,姿态角和位置构成了无人机在空间中六个自由度。
综上所述,得到偏航角跟踪控制软件流程如图4所示。
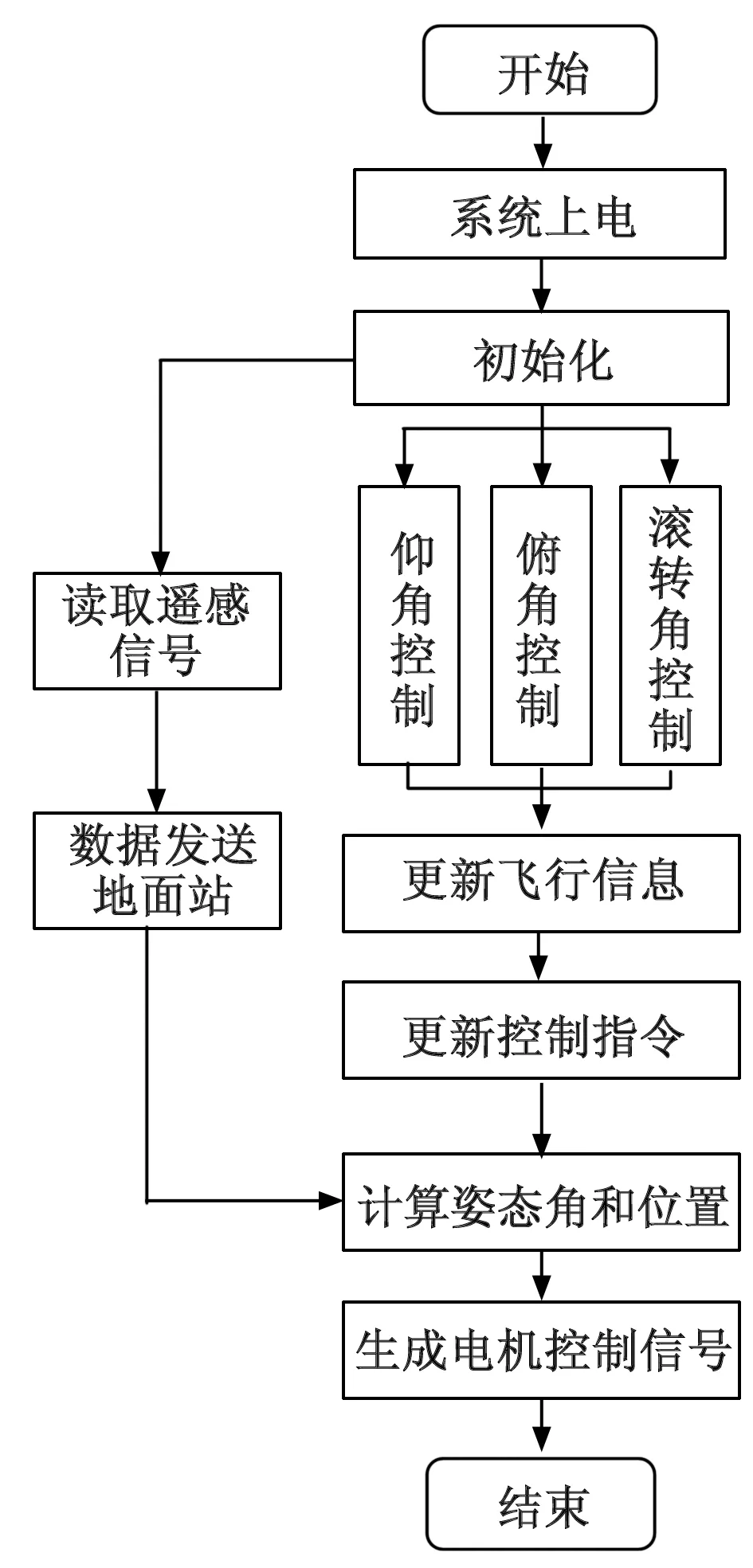
图4 偏航角跟踪控制软件流程
软件编程利用C语言编程软件实现。由图4可知,无人机通过控制发动机加减速实现偏航角。旋转机翼的横向和纵向摇摆通过控制机翼同侧发动机的加速和减速来实现。转子要想向左滚动,必须对转子座右侧的两个电机进行加速度,左边的两个电机进行减速;同样地,要使转子向前飞行,机架前面的两台电动机必须减速,后面的两台电动机必须加速;要使转子(偏航)左右转动,则必须在同一方向由一台电动机进行加速,另一台电动机进行减速。通过对电机加速度的调节,使多转子向所需方向倾斜,实现水平飞行。倾斜越大,加速越快。同时控制各电机的加速度,使之达到预定的飞行角度,从而完成系统设计。
4 实验结果与分析
在matlab/simulink里对基于核相关滤波的无人机偏航角跟踪控制系统设计合理性进行实验验证分析。
4.1 四旋翼无人机
以Draganflyer公司生产的vti四旋翼无人机为例,机体使用碳纤维和高性能塑料,4个旋翼马达主要是由机载电子设备提供动力的,由此实现不同方向飞行。vti四旋翼无人机实体图如图5所示。

图5 vti四旋翼无人机
无人机飞行控制器和地面站组成控制系统,该系统用于通信控制,机载传感器由接收器、超声速声呐定位传感器、蓝牙等组成。接收器可提供2 m左右的水平位置,声呐定位传感器可提供3 m左右的障碍信息,无人机与地面站间通过蓝牙通信传输数据。
4.2 无人机输出跟踪曲线
无人机在x、y、z轴方向期望输出曲线如图6所示。
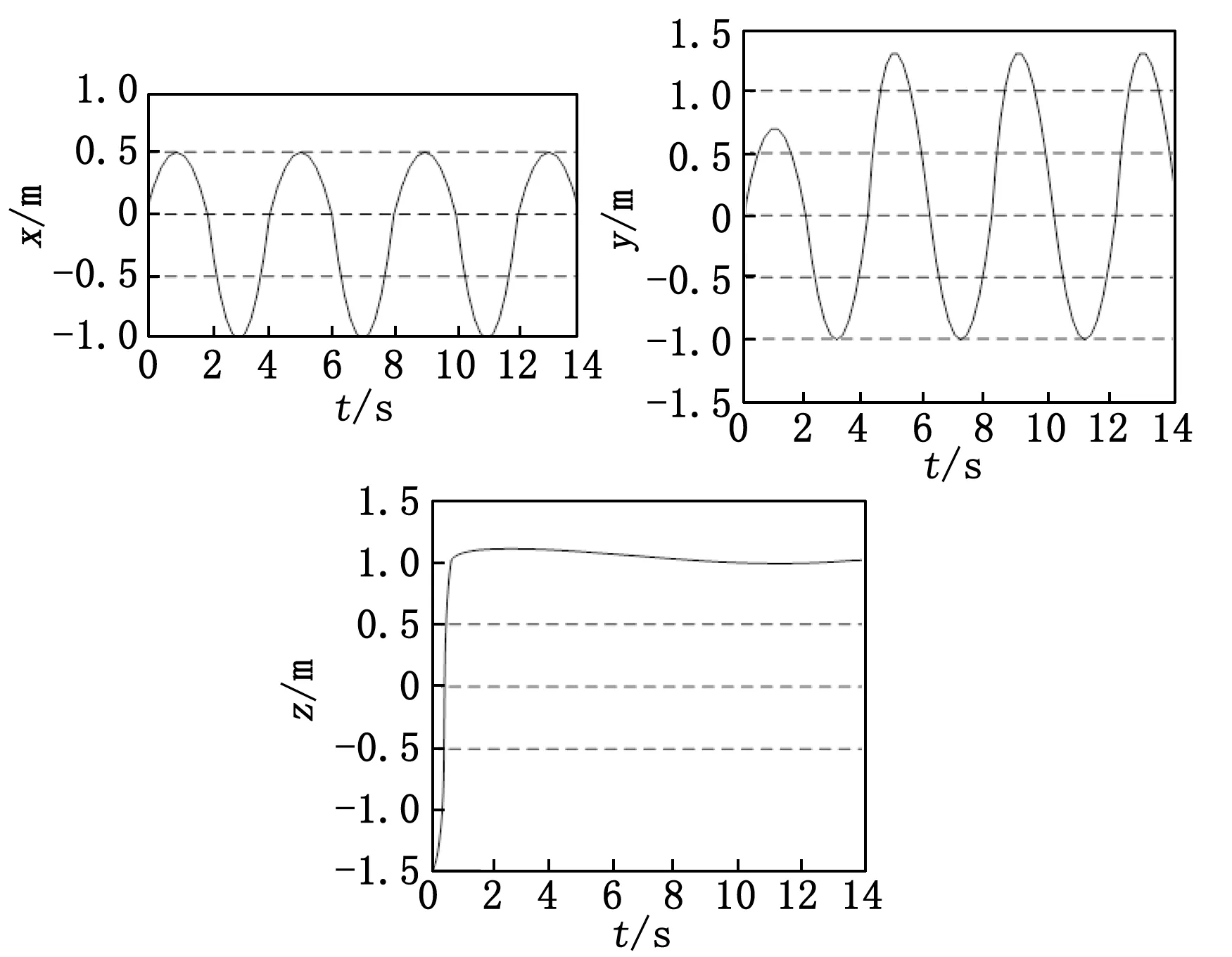
图6 x、y、z轴方向期望输出曲线
由图6可知,无人机在x轴方向上实际位移波动曲线具有一定规律性,在正方向上飞行距离为0.5 m,在反方向上飞行距离为1.0 m;无人机在y轴方向上实际位移波动曲线在4 s后具有一定规律性,在正方向上飞行距离为1.3 m,在反方向上飞行距离为1.0 m;无人机在z轴方向上实际位移波动曲线不具有规律性,在正方向上飞行距离为1.1 m,在反方向上飞行距离为1.5 m。
4.3 偏航角跟踪结果对比分析
分别使用非线性自抗扰控制技术设计的系统Q1、线性自抗扰技术设计的系统Q2和基于核相关滤波控制系统Q3对3个方向无人机飞行偏航角进行跟踪,对比内容如下所示。
4.3.1 滚转角
保持无人机在z轴方向上飞行距离不变,分别使用3种系统跟踪无人机滚转角,结果如图7所示。

图7 3种系统无人机滚转角跟踪结果对比分析
由图7可知,使用非线性自抗扰控制技术设计的系统和线性自抗扰技术设计的系统与实际值不一致,最大误差分别为0.5°和0.3°,而使用基于核相关滤波控制系统与实际值一致,误差为0。
4.3.2 俯仰角
保持无人机在z轴方向上飞行距离不变,分别使用3种系统跟踪无人机滚转角,结果如图8所示。

图8 3种系统无人机俯仰角跟踪结果对比分析
由图8可知,使用非线性自抗扰控制技术设计的系统与实际值不一致,最大误差为1.1°;使用线性自抗扰技术设计的系统与实际值相差较大,最大误差为4°,最小误差为2°;使用基于核相关滤波控制系统与实际值轨迹基本一致,误差为0.05°。
通过上述分析结果可知,使用基于核相关滤波控制系统偏航角跟踪控制精准度较高。
5 结束语
利用核相关滤波技术设计了无人机的偏航角跟踪控制系统,给出了整个姿态控制系统的软硬件实现。实验中较好的控制参数验证了控制方法的有效性,为今后无人机飞行控制系统的研究提供了新的思路。
基于核相关滤波技术设计的无人机偏航角跟踪控制系统已经达到了初步的研究目标,但在许多方面还有待改进,对于目标状态估计算法,在跟踪目标运动速度变化不大的情况下,其状态估计结果比较稳定、准确,但在速度变化时目标出现次数较多,具有明显的滞后性。将来,可以考虑使用多种模型对跟踪目标的状态转移过程联合描述。
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
语数外学习·高中版中旬(2021年11期)2021-02-14
科技创新与应用(2020年10期)2020-04-24
考试周刊(2018年15期)2018-01-21
航空模型(2017年3期)2017-07-28
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
