
一种智能驾驶汽车的航迹推演方法
2021-08-04 11:07陈海鸥徐达学
汽车电器 2021年7期
陈海鸥,姜 灏,徐达学,樊 瑞
(奇瑞汽车股份有限公司 汽车工程技术研发总院,安徽 芜湖 241000)
1 引言
随着汽车工业和人工智能技术的快速发展,具有智能驾驶功能的汽车在市场中逐步广泛应用。车辆可以通过自身传感器(如环视摄像头、超声波雷达、毫米波雷达等)监测车身周围环境和车道线、车辆所处位置以及移动或者静止障碍物信息,融合感知数据,结合AI人工智能算法,控制车辆的行驶轨迹和加减速运动,保障车辆自主、安全、可靠地行驶,并且在遇到障碍物时可以有效地刹停车辆。
对于智能驾驶技术,在高速公路、城郊快速通道、城市道路等路况应用较为常见。要实现车辆自主安全地驾驶,须明确车辆在全局坐标系中的相对位置,在一定区域内可以通过基础设施改造和SLAM(同步定位和建图)技术解决定位问题。在室内可以通过UWB(超宽带宽)定位到厘米级精度。智驾领域针对高速公路或者城郊快速通道实现高精度定位,是一项重要工作。当定位信号薄弱甚至丢失、车辆自身感知模块无法识别道路情况时,对于智能驾驶来说风险较大。
2 高精定位基本原理
2.1 GNSS定位
车辆通过GNSS信号获取当前所处位置信息,在世界坐标系下定位精度是米级,差分GNSS可以提供厘米级定位。但是并非所有交通路段都可以得到良好的信号,例如高楼林立的城市道路或者峡谷、涵洞、隧道等隐蔽区域,又或者在电磁场干扰区域,车辆收发电磁波信息受到干扰,造成定位信号薄弱甚至丢失,智能驾驶系统无法从算法上弥补,风险不可控。
如图1所示,智能驾驶车辆进入高楼林立的城市道路,由于高层建筑物的遮挡导致车辆无法接收定位信号,从而无法明确自身所在环境和位置,危险性较高。
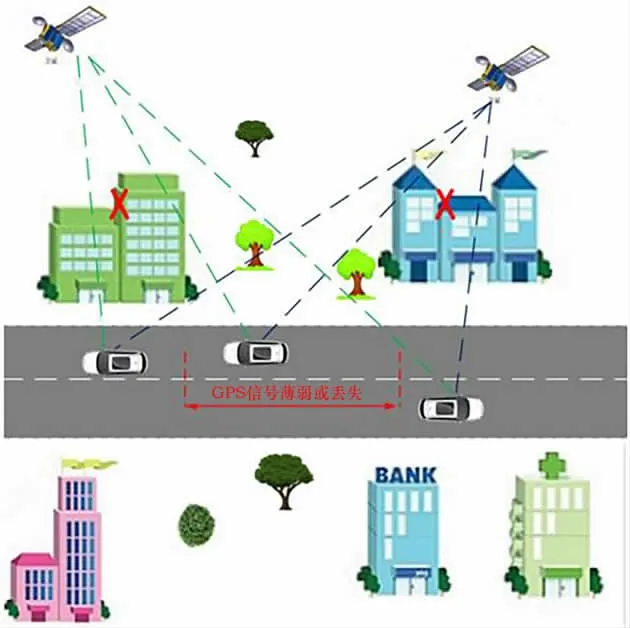
图1 高楼林立遮挡定位信号
2.2 传感器定位
智能驾驶控制器通过车载传感器—前摄像头获得周围环境信息和地理标志(如车道线、道路边界、交通标志、地理标志、行驶区域标志、限速标志等),融合高精地图信息,通过视觉电子围栏配对,获取车辆局部区域的相对位置。
如图2所示,车辆迎着太阳强光行驶,车辆的前视摄像头受强光影响,对前方车道线和交通标志的识别功能降低,相当于盲人驾车行驶,所以风险性极高。

图2 强光导致前视摄像头功能降低
上述两种技术方案,在智能驾驶汽车领域都会存在一定的风险性。为了解决这个问题,高精度惯性模块介入智能驾驶应用,以自身感知性能为主导,融合高精地图,嫁接人工智能,完美规避智驾风险工况。
3 航迹推演
3.1 基本原理
针对定位信号丢失或者前视摄像头强光致盲的情况,惯性模块的存在就将危险等级降低了几个数量级,大大提高了车辆的安全性。原因有3点:第一,惯性元件和车载传感器的原理本质不同,它完全不需要依靠外部资源或信息,它类似一个黑匣子,不需要和外部通信,不需要感知外部环境信息,自身的数据提供航向信息和当前车辆姿态信息,即可进行航迹推算;第二,惯性模块可以安装在汽车底盘、安全气囊或者其他不外露的区域,可以安装金属外壳以抵抗外部电磁波的干扰,也不会因为强光、暴雨、大雾等天气原因或者局部强磁场区域而受到干扰,数据高效可靠;第三,惯性模块的性能参数和轮速计的轮速信号及转向盘的转角信号互相构成冗余,使得输出数据的置信度远远高于其他传感器。
图3为智能驾驶航迹推演应用的前摄像头集成惯性模块的硬件架构图。惯性模块尺寸小巧,可以放置在前视摄像头中,摄像头采集的视频数据和惯性性能数据同时通过LVDS信号链路发送给智能驾驶控制器ECU。当然惯性模块也可以放置在智驾ECU中,融合信号及算法不受影响,从本质上看只是数据传输上下链路通道的应用不同,融合算法都在控制器,本文以图3为例介绍电子硬件架构设计方案。
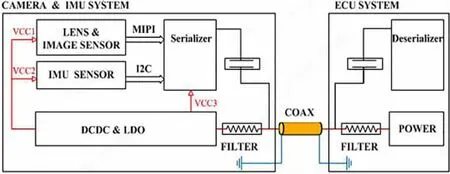
图3 智能驾驶航迹推演方案硬件架构
图像传感器的原始数据通过MIPI总线传输给串行器,惯性模块的数据(包括X、Y、Z三个轴、6个方向的加速度和角速度信息)通过I2C总线传输给视频数据流串行器。串行器内部将数据打包,通过同轴电缆发送给ECU系统解串器解包,由SOC进行分析,数据传输链路如图4所示。通过一路同轴电缆或者双绞线,同时将电源、视频数据和航向数据同时传输,利用频率差异将其分开。信号数据处理都是在片上系统SOC内部进行。
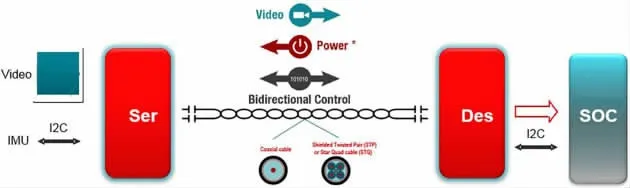
图4 数据传输链路
3.2 软件方案
智能驾驶汽车的位置组合定位算法与姿态组合算法过程基本相似,但是由于姿态信息是基于车身坐标系表达的数据,而位置信息是基于局部坐标系来表达,因此需要将加速度信息进行坐标变换。加速度一次积分得到速度信息,二次积分得到位置信息。将积分得到的位置信息和视觉感知得到的位置信息进行融合、匹配、校验,从而获得准确可靠的空间位置。下面详细讲解过程。
假设车辆的空间位置为矩阵公式X=[p va]T,p表示车辆位置,v表示车速,a表示加速度。另外,假设m表示周期,n表示第n个周期,d表示行驶工况噪声,则离散系统方程可表示为:
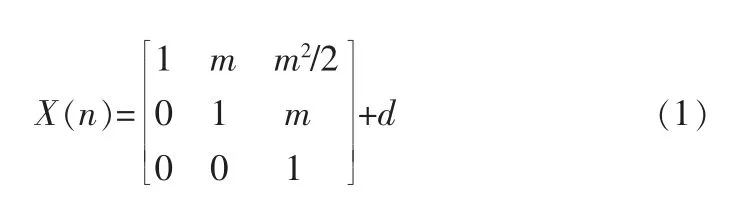
测量过程通过融合算法获得初始n=0时刻离散数据为:
D为测量噪声,行驶工况噪声d和测量噪声D为相互独立的呈高斯分布的白色噪声,互不影响。假设d和D分布概率为P(d)~N(0,Q),P(D)~N(0,R)。公式(2)可转换为:

公式(3)是通过视觉融合定位技术得到位置信息值以及通过惯性测量单元计算出的线性加速度值Z。在局部坐标系下线性加速度为:

其中车辆坐标系为y,惯导坐标系为x,则由x系变换为y系的坐标。Cxy是姿态更新实时输出计算出数据,fx为比力加速度值,Cxy通过公式(4)融合加速度和惯性数据得到车身姿态三轴欧拉角度换算式为:
式 中:a——cos;f——sin;e——roll;d——pitch;b——yaw。对于加速度计的输出数据,可以建立数学模型:

式中:wi,i=1…n——自回归参数;n——自回归阶数;vj,j=t~t-m——正态分布白噪声离散序列;m——平滑阶数。
根据数据的性质,可以简化数学模型,建立离散状态方程可以进行加速度信号扩展型卡尔曼的滤波,对高斯噪声进行过滤,提高传感器的输出精度。同时,在得到位置信息之后,可以进行空间位置的组合匹配定位过程,基于扩展型卡尔曼滤波算法实现,因此整个空间组合定位算法中,一级滤波得到滤噪声的加速度测量值,二级滤波实现视觉与惯性元件的组合模式,具体过程见图5。
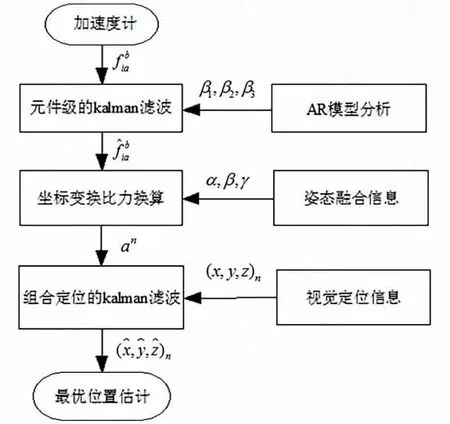
图5 空间位置的组合匹配定位过程
图5 中,βi(i=1,2,3)为数学模型的平滑参数,α为横滚角,β为俯仰角,γ为航向角。惯性元件直接输出的测量值fiab,该值是相对于导航系i的旋转角速度在载体系b下的高阶投影。通过卡尔曼滤波优化加速度,其中^为预估算法。再通过坐标变换和数学模型得到加速度信息,再结合公式(1)和(2)实现位置信息的数据融合。
优化的位置数据与速度数据作为下一次位置积分的初始值,修正漂移误差。数据平滑梯度可以提高转换精度。
4 结束语
智能驾驶技术的应用提高了车辆的可靠性和安全性,但是由于区域性因素导致定位信号薄弱或者失效会使得车辆行驶致盲。应用惯性模块融合视觉信息可以满足上述工况需求,通过离散系统方程、傅里叶变换和反傅里叶变换和欧拉公式等帮助车辆在人工智能AI驾驶算法的基础上推演一定时间和一定区域的航迹旅程,一方面支持智能驾驶前进轨迹的持续性和轨迹规划与控制的鲁棒性,另一方面为驾驶员接管车辆赢得时间,避免不必要的事故发生,大大提高了车辆的安全驾驶特性,为智能驾驶和无人驾驶领域的开拓性和适应性上提供了可靠的算法支撑。
猜你喜欢
当代水产(2022年6期)2022-06-29
金桥(2018年4期)2018-09-26
海峡姐妹(2018年2期)2018-04-12
人大建设(2018年12期)2018-03-21
杂文选刊(2018年1期)2018-01-09
新高考·高一物理(2015年5期)2015-08-18
新高考·高一物理(2015年5期)2015-08-18
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
