改进模糊神经网络的自主导向车路径规划*
2021-08-03 04:01:58朱国庆
现代交通与冶金材料 2021年1期
朱国庆
(常州宝菱重工机械有限公司, 江苏 常州 213012)
引 言
随着中国工业自动化水平的提高,自主导向车(AGV)在众多的领域获得应用[1]。AGV在企业物流搬运过程中所面对的工作环境非常复杂,会随着时间的变化而变化,存在诸多不确定性。AGV路径规划是一个热点问题,核心是控制算法:包括传统算法、图形学的方法、智能仿生算法、其他方法[2-3]。当前将局部和全局路径规划结合研究[4],在传统路径规划的方法中融入智能算法成为发展趋势[5]。本文将模糊控制与神经网络有机结合,利用神经网络的强大学习能力来调节模糊控制参数,既使神经网络获得模糊控制的推理归纳能力,也使模糊控制具有神经网络自学习能力。引入了碰撞危险度的概念,同时把空间碰撞危险度作为模糊控制器的输入变量,这样能更为准确和更全面地描述移动AGV与障碍物之间发生碰撞的危险关系[6]。在传统模糊神经网络中,模糊运算常采用静态、局部优化方法,本文提出了补偿模糊神经网络算法,它对模糊理论和神经网络技术进行有机融合,具有快速学习能力。
1 改进模糊神经网络算法
1.1 碰撞危险度
在AGV实时避障进行局部路径规划时,AGV与障碍物之间的距离、相对速度及相对加速度都影响到碰撞危险关系。为研究简单化,假定在AGV避障过程中,AGV的平移速度和动态障碍物速度在采样时间内恒定,仅讨论AGV与障碍物之间的距离和相对速度的方向与碰撞危险度的关系,也就是空间碰撞危险程度。以AGV相对于障碍物的最短距离和相对速度方位为参数,确定AGV与障碍物发生碰撞可能性大小的度量。图1表示了碰撞危险度的概念,第i个障碍物到AGV的距离为di,障碍物与AGV之间的相对速度为VR,Bi。将AGV上能感知的障碍物的两个端点定为A,B,相应的距离为a,b,障碍物与AGV相对速度与中心连线(CCi)的夹角为θ。考虑到运动障碍物的速度同时对AGV的碰撞危险度有影响,因此把运动障碍物的速度也相应考虑到碰撞危险度中,定义碰撞危险度SCR (space collision risk)为
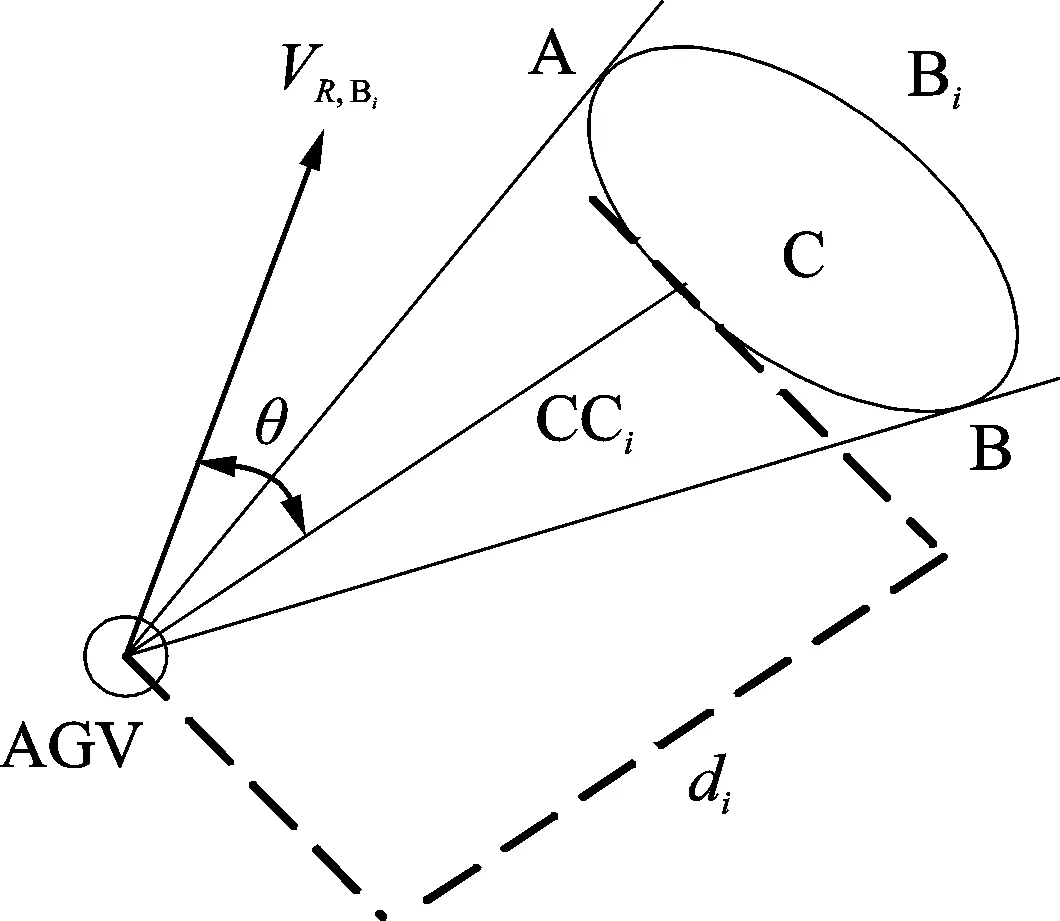
图1 碰撞危险度
SCR(t)=a×D(t)+b×F(t)
(1)
式中
从定义可以看到:影响因子为a,b,SCR(t)与距离的关系用D(t)来反映,SCR(t)与相对速度方向的关系用F(t)来反映;SCR(t)越大,碰撞可能性越大,SCR(t)越小,碰撞可能性越小。dmin为安全距离,dmax为最大测量距离,θ为安全角度,θmax为最大测量角度。
1.2 改进模糊神经元


图2 补偿模糊神经元
1.3 改进模糊神经网络
设计改进的模糊神经网络与传统的模糊神经网络一样有5层(如图3所示):输入层、模糊化层、模糊推理层、补偿运算层、反模糊化层。

图3 改进的模糊神经网络结构
第1层为输入层,有4个输入变量xi:分别是右前方障碍物碰撞危险度RSCR、正前方障碍物碰撞危险度CSCR、左前方障碍物碰撞危险度LSCR、目标定位导航角tr。

第5层是清晰化:将模糊运算得到的控制量变换为实际的清晰量。
1.4 补偿模糊神经网络的学习


(2)

(3)

(1) 输入隶属度函数宽度的训练。
(4)
(2) 输入隶属度函数中心的训练。
(5)
(3)输出隶属度函数宽度的训练。
(6)
(4)输出隶属度函数中心的训练。
(7)
(5)补偿度的训练。

(8)
2 动、静态障碍物环境仿真
2.1 AGV在静态环境中的路径规划
首先为AGV运行建立不确定环境,设定AGV起点S为(8,8),G点(80,80)为终点,障碍物分别设置在点(17,14),(22,26),(36,34),(40,48),(55,55),(67,72),在图4(a)中用小方框表示。设定AGV的最大速度为2 m/s,利用本文提出的补偿模糊神经网络在MATLAB中进行仿真实验,如图4(a)所示是在不确定环境中仿真的AGV行驶路径,从图中可以看出AGV能合理地躲避路障并到达目标点,图中的距离单位为m。图4(b),(c)分别表示了AGV在静态障碍物环境下运行时的转角变化曲线(度)和速度变化曲线(m/s)。

图4 AGV对静态障碍物的路径规划图
2.2 AGV在动态环境中的路径规划
当障碍物为运动的障碍物时,如图5(a)所示,图中数字单位为m。AGV起点定在(8,8),终点定在(80,80),设AGV的最大速度为2 m/s,AGV在避开障碍物的过程中速度会发生变化,图5(b)反映了AGV运行过程中速度变化的情况。障碍物从点(40,28)出发,以1.5 m/s速度向右上60°运动。从图5(a)中可以看出,AGV对障碍物采取了避让动作。图中的交叉点是AGV与障碍物在不同的时刻留下的轨迹。图5(c)描述了AGV在避障过程中AGV方向的改变情况。从图5知AGV未遇障碍物时以最大速度运行,遇到障碍物时速度图(单位m/s)显示首先减速,从转角图(单位为度)看,有从向左转向右的过程;这是因为避障是一个复杂的过程,AGV与障碍物的相对速度发生变化会引起转角的重新规划。

图5 AGV对动态障碍物的路径规划图
2.3 比较训练步数与误差收敛的速度
将E设定为0.005时,从仿真图6和图7比较

图6 传统模糊神经网络误差收敛曲线
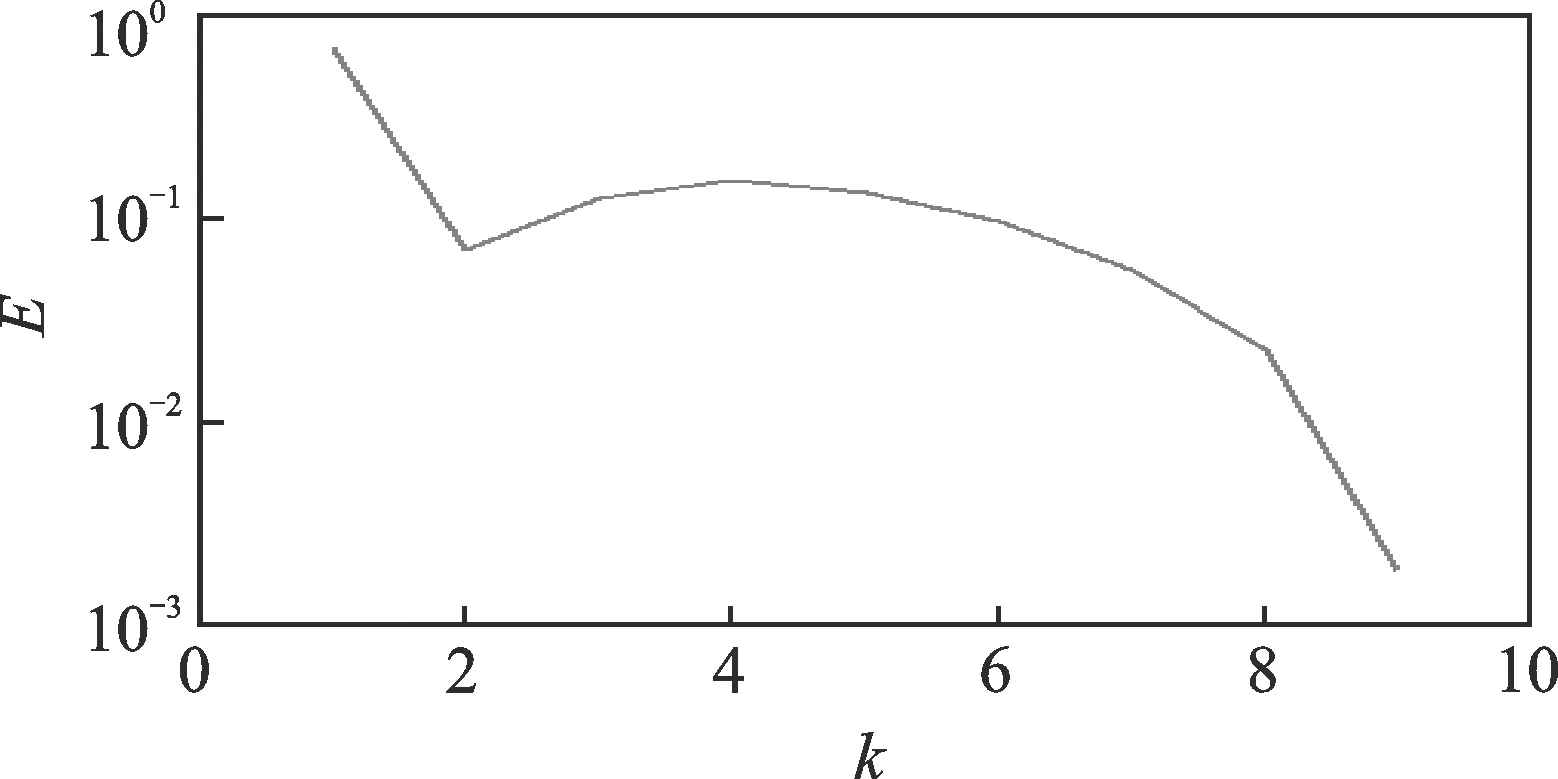
图7 补偿模糊神经网络误差收敛曲线
得知,经过k=17步传统模糊神经网络误差曲线收敛,经过k=9步补偿模糊神经网络误差曲线就收敛了,表明补偿模糊神经网络加快了收敛速度。
3 结束语
在全局误差相同的情况下,补偿模糊神经网络相比传统模糊神经网络具有快速学习的能力。引入了碰撞危险度,更好地描述了AGV与障碍物之间的碰撞危险程度。根据MATLAB的仿真结果,对
不确定环境中的静态和动态障碍物,表明应用本文所述方法,AGV都可以很好地避障与规划路径。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:24:00
宁夏医学杂志(2020年4期)2021-01-21 08:25:14
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
心肺血管病杂志(2019年6期)2019-07-12 09:04:34
现代消化及介入诊疗(2019年4期)2019-05-28 03:50:10
机电信息(2015年9期)2015-02-27 15:55:56
电子设计工程(2015年15期)2015-02-27 12:07:33
灾害学(2014年1期)2014-03-01 02:26:05
城市道桥与防洪(2014年5期)2014-02-27 07:26:44